Final Report - Old Dominion University
advertisement

Ship Draft Measurement Techniques
Using Ultrasonic Technologies
Written by:
David Mooney
Thomas Wheeless
David Mann
Phillip Stickle
Devin Samples-Wright
Samuel Harpin
Final Report
Project Management II
MAE 435
12/1/2015
Table of Contents
List of Figures.………………………………………………………..i
List of Tables………………………………………………………....ii
Acknowledgements……………………………………………….….iii
Abstract…………………………………………………………….....iv
Introduction and Background………………………………… ……….1
Methods…………………………………………………………….…3
Results……………………………...………………………………....12
Discussion…………………………………………………………….18
Conclusion…………………………………………………………….20
Appendices…………………………………………………………....21
References……………………………………………………….…....31
List of Figures
Figure 1- Wiring Configuration of Functionality Test of Maxbotix Sensor .................................... 4
Figure 2- Combined Sensor and Bluetooth Wiring Configuration ............................................... 5
Figure 3- Compilation of Design Images .................................................................................... 6
Figure 4- LabVIEW Block Diagram............................................................................................. 8
Figure 5- LabVIEW Graphical User Interface ............................................................................. 9
Figure 6- Wave Action in Wave Tank ........................................................................................11
Figure 7- FEA of L-Bracket Component under 20 Pound Force ................................................12
Figure 8- FEA of Assembled Extension Module under 20 Pound Force ....................................13
Figure 9- 1.969 Inch Wave Readings ........................................................................................13
Figure 10- 3.937 Inch Wave Readings ......................................................................................14
Figure 11- 5.91 Inch Wave Readings ........................................................................................14
Figure 12- 7.87 Inch Wave Readings ........................................................................................15
Figure 13- Wave Period Comparison ........................................................................................16
Figure 14- Precipitation Readings Comparison .........................................................................17
i
List of Tables
Table 1- Tabulated Results of Wave Testing (Deviations) .........................................................15
Table 2- Tabulated Results of Wave Testing (Average, Minimum, Maximum) ...........................16
ii
Acknowledgements
The authors thank Butch Brenton of Newport News Shipbuilding for providing a fun and
challenging project for senior mechanical engineering students and his continued work with Old
Dominion University. Thanks go to Dr. Sebastian Bawab, Dr. Miltiadis Kotinis, and ODU’s
Department of Mechanical and Aerospace Engineering for their guidance and funding for this
project. The authors would also like to thank Dr. Navid Tahvildari and Dr. Gangfeng Ma of the
Civil Engineering Department for their permission and aid in using ODU’s Coastal Engineering
Laboratory for our system testing.
iii
Abstract
Current practice in the naval industry for measuring draft of aircraft carriers is deploying
a small team in a boat and visually taking a draft reading. The purpose of the project was to
improve this process by producing a safe, economical, accurate, and portable method of
measuring the draft of an aircraft carrier during slack water conditions in the James River or
Elizabeth River. An ultrasonic rangefinding device was developed to meet these objectives.
Testing of the ultrasonic device was focused on wave action, precipitation, temperature, and
incident angle (gimbal). Special considerations to minimize the possibility of damage to the
ship’s protective hull coating system led to the development of a self-leveling and auto-aligning
mounting design that utilized insulated magnetic attachments. An accurate measurement of an
aircraft carrier’s draft was taken by temporarily mounting the device to the ship’s hull. Once
securely mounted and self-leveled, the device was able to accurately measure the distance from
the predetermined draft marking to the waterline using integrated software within 1/8th inch on
the vessel. The completed device was also complemented with Bluetooth wireless technology
and a LabVIEW graphical user interface to enable two-way data transmittance and operation
from any Bluetooth-enabled device.
iv
Introduction and Background
In both the commercial and military shipping industries, the draft height of a ship is an
important measurement during construction and loading. Draft is defined as the depth of the
vessel below the waterline measured vertically to the lowest part of the hull (keel) [1]. This
measurement is necessary to avoid damage during navigation in shallow waters and when
carrying cargo loads to prevent sinking during rough seas.[1] Ship captains and engineers also
use draft measurements to estimate a vessel's loaded and unloaded weight. While each ship has
unique calculations that are used to determine overall weight and weight distribution, all of these
calculations are based on Archimedes’ principle.[2] Even an inch difference in draft
measurement on a larger ship such as an aircraft carrier could equate to several hundred tons of
weight.[1] At Newport News Shipbuilding, the ship’s draft is used to calculate weight
distribution on an aircraft carrier, which in turn allows engineers to determine if the ship is
taking on water. In other types of ships, weight calculations can also be used to determine the
amount of cargo on board.[3]
In shipbuilding, draft marks are numbers which are placed on each side of a vessel near
the bow and stern, and often also amidships, to indicate the distance from the number to the
bottom of the keel.[4] Draft marks are six inches high and are spaced twelve inches bottom-tobottom vertically [5], and provide a reliable reference point by which draft can be measured. The
current method of measuring ship draft requires a small team to be deployed on a boat to
manually read draft marks using a graduated cylinder.[6] Using the draft marks as a reference,
the graduated cylinder allows the team to determine draft to a 1/8th inch accuracy. This method
requires the user to make visual estimates and accuracy can be affected by user experience and
environmental conditions (e.g. rough seas). The danger to personnel, susceptibility to
2
environmental conditions, and inherent inaccuracy of human judgement of this method of
measurement necessitated the need for a safe, robust, and accurate method to determine the draft
reading. Students in the Spring of 2015 considered and researched multiple potential solutions
including laser rangefinders, pressure sensors, ultrasonic rangefinders, and fiber optics. Based
upon the conclusions of prior research, it was decided that pressure sensors and fiber optics were
not viable solutions for this application because of cost, portability, and ease of use. A group of
students in the Summer of 2015 investigated laser rangefinders and ultrasonic rangefinders and
concluded that ultrasonic rangefinders maintained their accuracy through adverse operating
conditions. Therefore, the purpose of this project was threefold: to prove that ultrasonic
rangefinding is a viable solution for this application, to create a device can be used to wirelessly
measure the draft of an aircraft carrier using ultrasonic rangefinding, and to verify that the device
can reliably retain a 1/8th inch accuracy.
2
3
Methods
An Arduino Uno microprocessor was selected to read, analyze, and transmit signals from
the sensors in the device to the user’s device. Research was performed with a focus on finding
sensors that were both compatible with an Arduino Uno and met the accuracy requirements of
the device. The Maxbotix HLRV EZ4 Ultrasonic Sensor was chosen based on its accuracy and
compatibility with Arduinos. Additionally, a temperature/humidity sensor was selected based on
the same criteria. The AM2315 Temperature/Humidity sensor was chosen for this application
because it met the accuracy and compatibility requirements of the device.
The governing equation of ultrasonic rangefinding is as follows:
Equation 1
where c is the speed of sound, k is the ratio of specific heats, R is the gas constant, and T is the
absolute temperature. The speed of sound determines how quickly the high-frequency pulse
emitted by the sensor traverses the distance of interest and echoes back. The sensor records the
total time of flight of the pulse and determines the distance based on this time and the speed of
sound. While this equation does govern the fundamental process occurring in the readings taken
by the sensor, this equation is not employed directly in our project.
Each component was tested individually in the Arduino IDE (basic Arduino
environment) for functionality using publically available code designed for each sensor. The
code provided by the Maxbotix website is shown in Appendix C.1.1. The governing equation of
this code is as follows:
3
4
Equation 2
𝑉𝑚
∗5 = 𝐷
𝑉5𝑚𝑚
Where 𝑉𝑚 is the output voltage from the sensor is, 𝑉5𝑚𝑚 is a scaling factor that equals
approximately 4.9, and D is the measured distance in millimeters. The Maxbotix code was
uploaded to the Arduino and the device was wired as shown below to test functionality.
Figure 1- Wiring Configuration of Functionality Test of Maxbotix Sensor
The AM2315 Temperature/Humidity sensor was tested for functionality as well. The
publically available code that supports this sensor can be found in Appendix C.1.2 and is
provided by Adafruit. The library of files was downloaded and uploaded to the Arduino. The
wiring configuration is noted in the code that runs the sensor. After functionality testing was
performed on both sensors, the two were wired to work concurrently and the Adafruit Bluetooth
EZLink module was added to establish wireless data transmittance. Additionally, the publically
4
5
available code was modified as shown in Appendix C.1.3 to allow both sensors to read at the
same time. This wiring configuration is shown below:
Figure 2- Combined Sensor and Bluetooth Wiring Configuration
The combination of this wiring configuration and code shown in Appendix C.1.3 was used to
perform initial solid surface testing and wave tank testing later in the project. This code’s output
is formatted in a comma-separated format, allowing for seamless data transfer and analysis in
Microsoft Excel. All wires were soldered in place once functionality was proven and the code
was tested.
The method of mounting the device to an aircraft carrier was chosen to be magnets. A
magnet was chosen that has an on/off knob, allowing for easy mounting and dismounting of the
5
6
device on the ship. A 3D model was created in SolidWorks to house the magnet and connect it to
the electronics enclosure. The design ensured the operation of the on/off knob did not risk
dropping or damaging the device by the user by allowing room for operation using the hand.
Additionally, a dovetail was added to the design to allow mounting of adapters. These adapters
give the device the ability to hang perpendicularly to the surface of the water, even when
mounted to high angle surfaces on the aft of the ship.
Figure 3- Compilation of Design Images
The electronics enclosure itself was designed to allow mounting of all components,
protection, and ease of use and modification. Mounting points were included in the design to
allow for firm placement of all sensors, ensuring accuracy and repeatability. The enclosure was
designed with as little excess room around exposed sensors as possible to aid in waterproofing.
The completed design was prototyped using the Makerbot z18, a 3D printer, to reduce costs and
development time. Basic testing of this 3D printer was performed before prototyping the
enclosure to ensure the Makerbot z18 could meet the accuracy requirements of the design using
Polylactic Acid (PLA) filament. The printer met the accuracy requirements of the design and was
used to create the main body of the enclosure.
The lid of the enclosure was designed with the primary design consideration being
maximizing waterproofing. The main design feature is the second level of the lid, which
6
7
protrudes into the interior of the main body of the device and has an interference fit with the
walls of the body. The lid also has a small recess in the perimeter of the second level to
accommodate the incorporation of a gasket-like system created out of room temperature
vulcanization silicon (RTV Silicone). Because of the need of extreme accuracy in the
interference fit for the second layer, an improved printer was used to prototype the lid, the
“Stratsys” 3D printer owned by the Mechanical Engineering Department.
LabVIEW software was chosen for the development of the Graphical User Interface
(GUI). LabVIEW was chosen because it had the ability to interface with the Arduino, it is
aesthetically pleasing, and the shipyard already uses the software for other types of data
collecting.
Research was performed to facilitate data transfer between the Arduino and the GUI.
First, all of the different add-ons and drivers had to be downloaded to a laptop with LabVIEW
installed. Once the drivers were installed, the coding could begin. The first step in coding
required that firmware be uploaded to the Arduino so that the LabVIEW software could
communicate with the Arduino. Once the firmware was successfully uploaded some initial
testing of the interface took place. A simple on/off light code was generated to ensure that the
communication was successful. A USB cable for communication was utilized early in
development, though data transmission via the Bluetooth module proved to be a challenge.
While troubleshooting on the Bluetooth was being performed, the code that would be used for
testing was developed. The block diagram shown in Figure 4 depicts the code that was used
throughout the testing with LabVIEW.
7
8
Figure 4- LabVIEW Block Diagram
The solution to the Bluetooth data transmittance issue was to purchase a USB Bluetooth
adapter for the computer and run the Bluetooth through that device instead of through the
laptop's built-in Bluetooth. The user interface shown in Figure 5 was developed to allow
multiple inputs to help in the testing phase. The user was able to change the number of readings
per second, the number of readings per average and the number of readings per mean draft. The
number of readings per average was a part of a dampening feature that was written into the code
to compensate for natural voltage oscillation from the ultrasonic sensor. The LabVIEW code
would take two consecutive readings, average them, and report them as one reading to dampen
the oscillation. The number of readings per mean was the number of points that would be plotted
on the graph and the number of readings that would be averaged together to obtain a mean draft.
8
9
Figure 5- LabVIEW Graphical User Interface
Basic testing was performed to calibrate the device and verify it met the accuracy and
precision requirements of the project. This initial testing was performed by placing the device at
the end of a table and taking distance readings from that point to a wall. This distance was
measured using a tape measurer and the results were compared. Small adjustments were made to
𝑉5𝑚𝑚 in Equation 2 until the reading from the device consistently matched the measured
distance. Testing then began in Old Dominion University’s wave basin in the Coastal
Engineering Laboratory.
A test stand was created by modifying a commercially available aluminum stand with
adjustable height and a rotating ball joint. Holes were drilled into the mounting location, where a
thin galvanized steel sheet was bolted. The steel simulated the hull of an aircraft carrier by
allowing the unit to be attached via the directional magnet. A tape measure was used to find the
exact distance between the sensor and the target surface for every test. All test results were
9
10
compared to the measured value for accuracy. Initial testing was performed using the code
shown in Appendix C.1.3 and output data was analyzed/charted using Excel. Later testing
incorporated the LabVIEW GUI.
With the water partially drained from the wave basin, the test stand and device were
positioned above a dry location and at a known distance. Three readings were taken at this
distance and at a distance three inches higher. Once data was collected, the rolling platform was
moved over the deeper section of the wave tank that still contained water. The device was tested
in calm water conditions (no waves) using the same procedure as was used in the solid surface
testing. Next, wave testing was performed in the wave basin to simulate rough waters
experienced by ships while docked. Stoke’s 1st Order waves were primarily used as the
waveform during testing. This wave type has a constant mean depth and only depends on wave
period, height, and tank depth. [2] With the sensor positioned at a set height above the still water,
the wave maker was turned on for 30 seconds at a time. The wave maker was initially set to a
period of 1.5s and wave height was varied from 5cm to 20cm in 5cm increments, with five timeaveraged reading taken at each height. The wave height was then set to a constant 10cm and the
period was varied from 0.75s to 2.0s in 0.25s increments. The mean distances and plots of
measured distance over time were recorded for all tests.
10
11
Figure 6- Wave Action in Wave Tank
To determine if the draft sensor would perform ideally in adverse weather conditions, the
system was tested under simulated rain and fog. The effects of precipitation were tested via two
separate experiments. To simulate light precipitation, such as fine ocean spray, a spray bottle was
positioned horizontally and water was sprayed continuously between the sensor and the target
water. Heavy precipitation, such as what might be experienced in a heavy storm, was tested
through the use of a water hose and nozzle. The nozzle was elevated above the sensor and was
set such that a conical stream of water travelled downward at an angle through the ultrasonic
beam and impacted the water at the target location. Various nozzle positions were then tested to
determine the cause of any data errors that were encountered.
11
12
Results
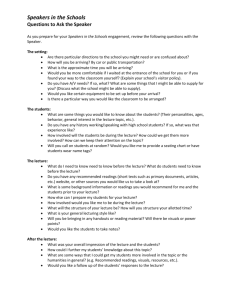
Finite Element Analysis (FEA) was performed on the mounting components for the
device in AutoDesk Inventor. Most crucially, the L-bracket shown in Figure 7 was tested with a
20 pound downward force, resulting in a maximum deflection of ⅛”. This loading is not realistic,
as actual loading will be 10 pounds when the device is fully extended and loaded.
Figure 7- FEA of L-Bracket Component under 20 Pound Force
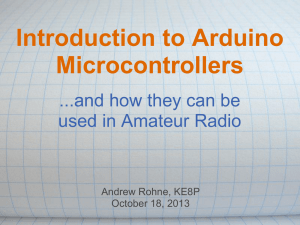
The extension module shown in Figure 8 was also modeled and run through FEA. This
component was also loaded with a 20 pound force, resulting in a maximum deflection of ½”. As
has been stated previously, this loading is not realistic and FEA simulations of realistic loadings
resulted in negligible deflection.
12
13
Figure 8- FEA of Assembled Extension Module under 20 Pound Force
It was found that the system was taking accurate readings on both solid and liquid
surfaces. Moreover, there was no change in readings when moving the sensor from positioned
over shallow water with a depth of less than two inches to deep water with a depth of roughly
fifteen inches.
Figure 9- 1.969 Inch Wave Readings
13
14
Figure 10- 3.937 Inch Wave Readings
Figure 11- 5.91 Inch Wave Readings
14
15
Figure 12- 7.87 Inch Wave Readings
Table 1- Tabulated Results of Wave Testing (Deviations)
When collecting data for Stoke’s 1st Order waves, it was found that the average reading
matched the still water distance to within 0.1 inches. However, our sensor was also able to
determine the actual wave height by measuring the maximum and minimum readings. In all
cases, it was found that the actual wave height was invariably lower than the theoretical wave
height.
15
16
Table 2- Tabulated Results of Wave Testing (Average, Minimum, Maximum)
After collecting data with varying wave height at a set 1.5s period, the wave height was set to a
constant 10cm and the period was varied in 0.25s increments. Due to limitations of the lab
machinery, the lowest testable period was 0.75s. It was found that at this period, the sensor’s
average reading deviated from the actual distance by 0.5 inches. However, the maximum and
minimum readings were roughly equivalent in both cases. Below is a graph that shows readings
taken for 10cm waves at both 0.75s and 1.5s periods.
Figure 13- Wave Period Comparison
16
17
Figure 14- Precipitation Readings Comparison
17
18
Discussion
It can be surmised that the system accurately takes readings regardless of the surface
type. Even though the sensor was initially calibrated for optimum accuracy on a hard solid
surface, it was able to take readings over water well within our desired 1/8th inch accuracy.
Moreover, there is no discernible deviation in readings caused by water depth—readings taken
over shallow water will always be equal to readings taken over deep water.
At 1.5s period, the average reading taken at any given wave height was less than 0.1
inches different from the actual distance. However, it was found that the average reading for a
10cm wave height and 0.75s period that the average reading was decreased by 0.5 inches, which
is well above the desired system accuracy. This large jump in error is caused by the close
proximity of the high frequency wave crests. The wave crests are so close that they prevent the
ultrasonic beam from reaching the bottom of the wave’s trough due to the beam’s significant
diameter. It can be inferred that the system is therefore more accurate and reliable for long
rolling waves.
The simulated light precipitation had no effect whatsoever on the unit’s readings. The
fine mist passed under the sensor but did not cause the beam to reflect back to the unit, ensuring
that the beam travelled the full distance to the water’s surface. While the weatherproof unit will
work as intended in misty conditions, there may be some issues with heavier precipitation.
Simulated rain impacting the water’s surface caused highly erratic readings and increased the
average reading by 0.5 inches. One possibility for the small discrepancy in readings is that the
raindrops cause small cavitations in the water’s surface with a slightly lower elevation. At the
same time, it was found that there is no correlation between reading errors and rain passing under
18
19
the sensor. When the simulated rain was repositioned such that it travelled diagonally between
the sensor and water but without impacting the water’s surface, deviation from calm water
readings was less than 0.1 inches. The beam travels to the water’s surface without bouncing off
of the rain drops, similar to the results from the simulated mist.
Changes in temperature were found to severely affect the system and could potentially be
debilitating to the current design. System calibration and most other tests were performed at
room temperature around 72℉. However, NNS will realistically be forced to perform their draft
readings in a wide range of temperatures. It was found that when immediately moving the device
outside to an ambient temperature of approximately 43℉, the readings were affected greatly.
However, when the device was allowed to cool to the ambient temperature, the reading was
corrected to some extent, but not fully. Further investigation, development, and testing are
required to fully compensate for all operational temperatures.
19
20
Conclusion
It has been proven that ultrasonic rangefinders are a viable way of measuring the draft of
an aircraft carrier. The designed system is easily mountable to the hull of an aircraft carrier and
only required an angled adapter to mount on a high angle hull section. With the optional 40°
angled adapter and self-leveling gimbal, the draft sensor can rest perpendicular to the water even
when the hull is at an angle of 57.5°. The magnetic mount is attached to the hull with 150 lbs of
force, but is easily removed when the magnet is switched off. Furthermore, the completely
wireless device is able to display data to a PC from up to 33 feet away. The LabVIEW-based
graphical user interface automates the data collection process for ease of use, but allows users to
modify data collection as needed. Data is output in graphical form showing the readings over
time, while also giving the mean draft for use in weight calculations. Testing of the device
proved that it can accurately read draft well within an accuracy of 1/8th inch, is capable of
functioning in inclement weather, and is able to determine the correct mean draft even in rough
water conditions. It was found that the mean calculated draft is accurate for most types of waves
that should be experienced at Newport News Naval Shipyard, and is especially effective for low
frequency waves of any height. Most forms of precipitation have no detrimental effect on draft
readings, but very heavy rain may skew readings by roughly ½ inch. The main limitation of the
device is its ability to fully compensate for extreme temperatures, but this can be remedied in
future iterations of the project. Overall, this device fully meets the objectives set forth by the
customer as well as Old Dominion University and is ready for further testing in the field.
20
21
Appendices
Appendix A: Gantt Charts
Appendix A.1.1- Gantt Chart
21
22
Appendix A.1.2- Tracking Gantt Chart
22
23
Appendix B: Budget
Appendix B.1.1- Budget Table
Fall 2015 Expense Budget
Vendor
Part
Description
Quantity
Part #
Price
www.adafruit.com
Arduino Uno R3 Kit
Microprocessor and Accessories
1
193
$49.50
www.adafruit.com
Maxbotic HRLV-624 EZ4
Sonic Ranging Sensor
1
985
$32.95
www.adafruit.com
AM2314 Enclosed I2C
Humidity and Temperature
Sensor
1
1293
$29.95
www.adafruit.com
BT EZ-LINK v1.3
Bluetooth Wireless
1
1588
$22.50
www.adafruit.com
6xAA Battery House
Battery Holder
1
248
$5.00
www.adafruit.com
LED 3 Color
LED
1
159
$2.00
www.adafruit.com
LED Holder
Sockets
1
2178
$4.95
www.adafruit.com
9V Wall Power Adapter
Wall Charging
1
63
$6.95
www.mcmaster.com
Magnet
Easy On Off Encased Magnet
150lb Max Pull
1
9649T14
$56.46
www.mcmaster.com
Swivel Linkage
Heavy Duty In Line Ball Joint
Linkage 5/16" - 24
1
8412K42
$11.08
www.mcmaster.com
Switch
Wash Down Rocker Switch
1
6797T21
$12.88
www.mcmaster.com
Knob
Black Phenolic with Type 302
Stainless Steel Stud - Knob
1
57715K56
$2.77
O'Reilly Auto Parts
Tape
Duct Tape
1
60122
$5.99
O'Reilly Auto Parts
Cotter Pins
1/8 inch pin
1
445040BP
2.49
O'Reilly Auto Parts
Screw
Stainless Steel Screwa
1
010367BP
2.49
Amazon
Test Stand
Multi-use Adjustable Stand
1
stnd1
37.52
Staples
MakerBot
Red PLA Filament
1
MPO5779
50.64
Total Project Cost
$336.12
23
24
Appendix C: Arduino Code
Appendix C.1.1- Maxbotix Code
source: http://www.maxbotix.com/articles/085-pt4.htm#RTC
const int anPin = 0;
long anVolt, mm, inches;
void setup() {
Serial.begin(9600);
}
void read_sensor(){
anVolt = analogRead(anPin);
mm = anVolt * 5;
inches = mm/25.4;
}
void print_range(){
Serial.print("S1");
Serial.print("=");
Serial.print(mm);
Serial.print(" ");
Serial.println(inches);
}
void loop() {
read_sensor();
print_range();
delay(100);
}
24
25
Appendix C.1.2- AM2315 Code
source: https://github.com/adafruit/Adafruit_AM2315
#include <Wire.h>
#include <Adafruit_AM2315.h>
#include <SPI.h>
#include <SD.h>
/***************************************************
This is an example for the AM2315 Humidity + Temp sensor
Designed specifically to work with the Adafruit BMP085 Breakout
----> https://www.adafruit.com/products/1293
These displays use I2C to communicate, 2 pins are required to
interface
Adafruit invests time and resources providing this open source code,
please support Adafruit and open-source hardware by purchasing
products from Adafruit!
Written by Limor Fried/Ladyada for Adafruit Industries.
BSD license, all text above must be included in any redistribution
****************************************************/
// Connect RED of the AM2315 sensor to 5.0V
// Connect BLACK to Ground
// Connect WHITE to i2c clock - on '168/'328 Arduino Uno/Duemilanove/etc thats Analog 5
// Connect YELLOW to i2c data - on '168/'328 Arduino Uno/Duemilanove/etc thats Analog 4
Adafruit_AM2315 am2315;
void setup() {
Serial.begin(9600);
if (! am2315.begin()){
Serial.println("Sensor not found, check wiring & pullups!");
25
26
while (1);}
}
void serial_print_all() {
Serial.print(am2315.readHumidity()); Serial.print(", "); Serial.print("%, ");
Serial.print(am2315.readTemperature()); Serial.println(", degC");
}
void loop() {
while (counter < 301){
serial_print_all();
//file_print();
counter=counter+1;
delay(50);
}
}
26
27
Appendix C.1.3- Combined Code
#include <Wire.h>
#include <Adafruit_AM2315.h>
#include <SPI.h>
#include <SD.h>
// Connect RED of the AM2315 sensor to 5.0V
// Connect BLACK to Ground
// Connect WHITE to i2c clock - on '168/'328 Arduino Uno/Duemilanove/etc thats Analog 5
// Connect YELLOW to i2c data - on '168/'328 Arduino Uno/Duemilanove/etc thats Analog 4
Adafruit_AM2315 am2315;
const int anPin1 = 0;
int counter=1;
long distance1;
double inches;
void setup() {
Serial.begin(9600);
if (! am2315.begin()) {
Serial.println("Sensor not found, check wiring & pullups!");
while (1);
}
}
void read_sensors(){
/* Scale factor is (Vcc/1024) per 5mm. A 5V supply yields ~4.9mV/5mm Arduino analog pin
goes from 0 to 1024,
so the value has to be multiplied by 5 to get range in mm */
distance1 = analogRead(anPin1)*5;
inches = distance1/25.4;
}
27
28
void serial_print_all() {
Serial.print(inches); Serial.print(", "); Serial.print("in"); Serial.print(", ");
Serial.print(am2315.readHumidity()); Serial.print(", "); Serial.print("%, ");
Serial.print(am2315.readTemperature()); Serial.println(", degC");
}
void loop() {
while (counter < 301){
read_sensors();
serial_print_all();
//file_print();
counter=counter+1;
delay(50);
}
}
28
29
Appendix D: Additional Figures
Figure D.1.1- Maxbotix Sensor Specifications
29
30
Figure D.1.2- Ship Diagram
30
31
References
[1]
Zheng, H , Huang, Y , Ye, Y , New Level Sensor System for Ship Stability Analysis and
Monitor , IEEE Transactions on Instrumentation and Measurement , vol 48 , no 6, p.1014 - 1017
[2] C. T. Ridgely, "Archimedes' principle in general coordinates," European Journal of Physics,
vol. 31, pp. 491-9, 05/ 2010.
[3] Wenwei Chen, Ji Yu, Jie Xu, Canhong Jiang, Lian Chen, “A New Measurement
System of Ship Draft”, Ship Building of China, vol. 54, pp. 166-171, 2013
[4 J. C. Kaimal and J. E. Gaynor, “Another look at sonic thermometry”, Boundary-Layer
Meteorology, vol. 56, pp. 401-10, 1991.
[5]
G. Stokes, “On the Theory of Oscillatory Waves”, Transactions of the Cambridge
Philosophical Society VIII (1847) 197–229, and Supplement 314–326.
[6] Nomenclature of Naval Vessels, Naval History and Heritage Command, [Online].
Available: http://www.history.navy.mil/research/library/online-reading-room/title-listalphabetically/n/nomenclature-of-naval-vessels.html
31