ch4 - Alan Moses
advertisement

Statistical modeling and machine learning for molecular biology
Alan Moses
Chapter 4 –parameter estimation and multivariate statistics.
1. Parameter estimation
Fitting a model to data: objective functions and estimation
Given a distribution or “model” for data, the next step is to “fit” the model to the data. Typical
probability distributions will have unknown parameters, numbers that change the shape of the
distribution. The technical term for the procedure of finding the values of the unknown
parameters of a probability distribution from data is “estimation”. During estimation one seeks
to find parameters that make the model “fit” the data the “best.” If this all sounds a bit subjective,
that’s because it is. In order to proceed, we have to provide some kind of mathematical
definition of what it means to fit data the best. The description of how well the model fits the
data is called the “objective function.” Typically, statisticians will try to find “estimators” for
parameters that maximize (or minimize) an objective function. And statisticians will disagree
about which estimators or objective functions are the best.
In the case of the Gaussian distribution, these parameters are called the “mean” and “standard
deviation” often written as mu and sigma. In using the Gaussian distribution as a model for some
data, one seeks to find values of mu and sigma that fit the data. As we shall see, what we
normally think of as the “average” is in fact an “estimator” for the mu parameter of the Gaussian
that we refer to as the mean.
2. Maximum Likelihood Estimation
The most commonly used objective function is known as the “likelihood”, and the most wellunderstood estimation procedures seek to find parameters that maximize the likelihood. These
maximum likelihood estimates (once found) are often referred to as MLEs.
The likelihood is defined as a conditional probability: P(data|model), the probability of the data
given the model. Typically, the only part of the model that can change are the parameters, so the
likelihood is often written as P(X|θ) where X is a data matrix, and θ is a vector containing all the
parameters of the distribution(s). This notation makes explicit that the likelihood depends on
both the data and a choice of any free parameters in the model.
More formally, let’s start by saying we have some i.i.d., observations from a pool, say X1, X2 …
Xn, which we will refer to as a vector X. We want to write down the likelihood, L, which is the
conditional probability of the data given the model. In the case of independent observations, we
can use the joint probability rule to write:
𝑛
𝐿 = 𝑃(𝑋|𝜃) = 𝑃(𝑋1|𝜃)𝑃(𝑋2 |𝜃) … 𝑃(𝑋𝑛 |𝜃) = ∏ 𝑃(𝑋𝑖 |𝜃)
𝑖=1
Statistical modeling and machine learning for molecular biology
Alan Moses
Maximum likelihood estimation says: “choose the parameters so the data is most probable given
the model” or find θ that maximizes L. In practice, this equation can be very complicated, and
there are many analytic and numerical techniques to solve it.
3. The likelihood for Gaussian data.
To make the likelihood specific we have to choose the model. If we assume that each
observation is described by the Gaussian distribution, we have two parameters, the mean, μ and
standard deviation σ.
𝑛
𝑛
𝑛
𝐿 = ∏ 𝑃(𝑋𝑖 |𝜃) = ∏ 𝑁(𝑋𝑖 |𝜇, 𝜎) = ∏
𝑖=1
𝑖=1
𝑖=1
1
𝜎√2𝜋
𝑒
−
(𝑋𝑖 −𝜇)2
2𝜎2
Admittedly, the formula looks complicated. But in fact, this is a *very* simple likelihood
function. I’ll illustrate this likelihood function by directly computing it for an example.
Observation (i)
1
2
3
4
5
L = 0.000063798
Value (Xi)
5.2
9.1
8.2
7.3
7.8
P(Xi|θ)= N(Xi | μ = 6.5, σ=1.5)
0.18269
0.059212
0.13993
0.23070
0.18269
Notice that in this table I have chosen values for the parameters, μ and σ, which is necessary to
calculate the likelihood. We will see momentarily that these parameters are *not* the maximum
likelihood estimates the parameters that maximize the likelihood), but rather just illustrative
values. The likelihood (for these parameters) is simply the product of the 5 values in the right
column of the table.
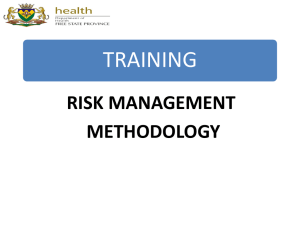
It should be clear that as the dataset gets larger, the likelihood gets smaller and smaller, but
always is still greater than zero. Because the likelihood is a function of all the parameters, even
in the simple case of the Gaussian, the likelihood is still a function of two parameters (plotted in
figure X) and represents a surface in the parameter space. To make this figure I simply calculated
the likelihood (just as in the table above) for a large number of pairs of mean and standard
deviation parameters. The maximum likelihood can be read off (approximately) from this graph
as the place where the likelihood surface has its peak. This is a totally reasonable way to
calculate the likelihood if you have a model with one or two parameters. You can see that the
standard deviation parameter I chose for the table above (1.5) is close to the value that
maximizes the likelihood, but the value I chose for the mean is probably too small – the
maximum looks to occur when the mean is around 7.5.
Statistical modeling and machine learning for molecular biology
Alan Moses
0.00025
0.0002
Likelihood, L
0.00015
0.0001
10
0.00005
7.5
0
1
1.5
2
2.5
3
3.5
4
Mean, μ
5
Standard
deviation, σ
Figure X – numerical evaluation of the likelihood function
This figure also illustrates two potential problems with numerical methods to calculate the
likelihood. If your model has many parameters, drawing a graph becomes hard, and, more
importantly, the parameter space might become difficult to explore: you might think you have a
maximum in one region, but you might miss another peak somewhere else in high dimensions.
The second problem is that you have to choose individual points to numerically evaluate the
likelihood – there might always be a point in between the points you evaluated that has a slightly
higher likelihood.
4. How to maximize the likelihood analytically
Although numerical approaches are always possible now-a-days, it’s still faster (and more fun!)
to find the exact mathematical maximum of the likelihood function if you can. We’ll derive the
MLEs for the univariate Gaussian likelihood introduced above. The problem is complicated
enough to illustrate the major concepts of likelihood, as well as some important mathematical
notations and tricks that are widely used to solve statistical modeling and machine learning
problems. Once we have written down the likelihood function, the next step is to find the
maximum of this function by taking the derivatives with respect to the parameters, setting them
equal to zero and solving for the maximum likelihood estimators. Needless to say, this probably
seems very daunting at this point. But if you make it through this book, you’ll look back at this
problem with fondness because it was so *simple* to find the analytic solutions. The
mathematical trick that makes this problem go from looking very hard to being relatively easy to
solve is the following: take the logarithm. Instead of working with likelihoods, in practice, we’ll
almost always use log-likelihoods because of their mathematical convenience. (Log likelihoods
are also easier to work with numerically because instead of very very small positive numbers
near zero, we can work with big negative numbers.) Because the logarithm is monotonic (it
Statistical modeling and machine learning for molecular biology
Alan Moses
doesn’t change the ranks of numbers) the maximum of the log-likelihood is also the maximum of
the likelihood. So here’s the mathematical magic:
𝑛
𝑛
𝑛
𝑖=1
𝑖=1
𝑖=1
1
(𝑋𝑖 − 𝜇)2
𝑙𝑜𝑔𝐿 = 𝑙𝑜𝑔 ∏ 𝑁(𝑋𝑖 |𝜇, 𝜎) = ∑ log𝑁(𝑋𝑖 |𝜇, 𝜎) = ∑ −log𝜎 − log(2π)−
2
2𝜎 2
In the preceding we have used many properties of the logarithm: log(1/x) = -log x, log(xy) =
log(x) + log(y), and log (ex) = x. This formula for the log likelihood might not look much better,
but remember that we are trying to find the parameters that maximize this function. To do so we
want to take its derivative with respect to the parameters and set it equal to zero. To find the
maximum likelihood estimate of the mean, µ, we will take derivatives with respect to µ. Using
the linearity of the derivative operator, we have
𝑛
𝜕
𝜕
1
(𝑋𝑖 − 𝜇)2
𝑙𝑜𝑔𝐿 =
∑ −log𝜎 − log(2π)−
𝜕𝜇
𝜕𝜇
2
2𝜎 2
𝑖=1
𝑛
= ∑−
𝑖=1
𝜕
1 𝜕
𝜕 (𝑋𝑖 − 𝜇)2
log𝜎 −
log(2π)−
=0
𝜕𝜇
2 𝜕𝜇
𝜕𝜇 2𝜎 2
Since two of the terms have no dependence on µ, their derivatives are simply zero. Taking the
derivatives we get
𝑛
𝑛
𝑖=1
𝑖=1
𝜕
2(𝑋𝑖 − 𝜇)
1
𝑙𝑜𝑔𝐿 = ∑ −0 − 0+
= 2 ∑(𝑋𝑖 − 𝜇) = 0
2
𝜕𝜇
2𝜎
𝜎
Where in the last step we took out of the sum the σ2 that didn’t depend on i. Since we can
multiply both sides of this equation by σ2, we are left with
𝑛
𝑛
𝑛
𝑛
𝑖=1
𝑖=1
𝑖=1
𝑖=1
𝜕
𝑙𝑜𝑔𝐿 = ∑(𝑋𝑖 − 𝜇) = ∑ 𝑋𝑖 − ∑ 𝜇 = ∑ 𝑋𝑖 − 𝑛𝜇 = 0
𝜕𝜇
Which we can actually solve
𝑛
𝜇 = 𝜇𝑀𝐿𝐸
1
= ∑ 𝑋𝑖 = 𝑚𝑋
𝑛
𝑖=1
this equation tells us the value of µ that we should choose if we want to maximize the likelihood.
I hope that it is clear that the suggestion is simply to choose the sum of the observations divided
by the total number of observations – in other words, the average. I have written µMLE to remind
us that this is the maximum likelihood estimator.
Notice that although the likelihood function (illustrated in figure X) depends on both parameters,
the formula we obtained for the µMLE doesn’t. A similar (slightly more complicated) derivation
is also possible for the standard deviation.
Statistical modeling and machine learning for molecular biology
Alan Moses
𝑛
𝜕
1
𝑙𝑜𝑔𝐿 = 0 → 𝜎𝑀𝐿𝐸 = √ ∑(𝑋𝑖 − 𝜇)2 = 𝑠𝑋
𝜕𝜎
𝑛
𝑖=1
In the MLE for the standard deviation, there is an explicit dependence on the mean. Because in
order to maximize the likelihood, the derivatives with respect to *all* the parameters must be
zero, to get the maximum likelihood estimate for the standard deviation you need to first
calculate the MLE for the mean and plug it in to the formula above.
In general, setting the derivatives of the likelihood with respect to all the parameters to zero leads
to a set of equations with as many equations and unknowns as the number of parameters. In
practice there are very few problems of this kind that can be solved analytically.
Mathematical box- The distribution of parameter estimates for MLEs.
Assuming that you have managed to maximize the likelihood of your model using either analytic
or numerical approaches, it is sometimes possible to take advantage of the very well-developed
statistical theory in this area to do hypothesis testing on the parameters. The maximum
likelihood estimator is a function of the data, and therefore it will not give the same answer if
another random sample is taken from the distribution. However, it is known that (under certain
assumptions) the maximum likelihood estimates will be Gaussian distributed, with means equal
to the true means of the parameters, and variances related to the second derivatives of the
likelihood at the maximum, which are summarized in the so-called Fisher Information matrix
(which I abbreviate as FI).
𝑉𝑎𝑟(𝜃𝑀𝐿𝐸 ) = 𝐸[−𝐹𝐼 −1 ]𝜃=𝜃𝑀𝐿𝐸
This formula says that the variance of the parameter estimates is the (1) expectation of the
negative of (2) inverse of the (3) Fisher information matrix, evaluated at the maximum of the
likelihood (so that all parameters have been set equal to their MLEs. I’ve written the numbers to
indicate that getting the variance of the parameter estimates is actually a tedious three step
process, and it’s rarely used in practice for that reason. However, if you have a simple model,
and don’t mind a little math, it can be incredibly useful to have these variances. For example, in
the case of the Gaussian distribution, there are two parameters (u and sigma), so the Fisher
information matrix is a 2 x 2 matrix.
𝜕 2 𝑙𝑜𝑔𝐿
𝜕𝜇 2
𝐹𝐼 = 2
𝜕 𝑙𝑜𝑔𝐿
[ 𝜕𝜇𝜕𝜎
𝜕 2 𝑙𝑜𝑔𝐿
𝑛
− 2
𝜕𝜇𝜕𝜎
𝜎
=[
2
𝜕 𝑙𝑜𝑔𝐿
0
𝜕𝜎 2 ]
0
2𝑛]
− 2
𝜎
The first step in getting the variance of your estimator is evaluating these derivatives. In most
cases, this must be done numerically, but in textbook examples they can be evaluated
analytically. For the Gaussian model, at the maximum of the likelihood they have the simple
formulas that I’ve given above.
Statistical modeling and machine learning for molecular biology
Alan Moses
The second derivatives measure the change in the slope of the likelihood function, and it makes
sense that they come up here because the variance of the maximum likelihood estimator is
related intuitively to the shape of the likelihood function near the maximum. If the likelihood
surface is very flat around the estimate, there is less certainty, whereas if the maximum
likelihood estimate is at a very sharp peak in the likelihood surface, there is a lot of certainty -another sample from the same data is likely to give nearly the same maximum. The second
derivatives measure the local curvature of the likelihood surface near the maximum.
Once you have the derivatives (using the values of the parameters at the maximum), the next step
is to invert this matrix. In practice, this is not possible to do analytically for all but the simplest
statistical models. For the Gaussian case, the matrix is diagonal, so the inverse is just
𝐹𝐼 −1
𝜎2
−
𝑛
=
[ 0
0
𝜎2
− ]
2𝑛
Finally, once you have the inverse, you simply take the negative of the diagonal entry in the
matrix that corresponds to the parameter you’re interested in, and then take the expectation. So
the variance for the mean would be
𝜎2
𝑛
. This means that the distribution of 𝜇𝑀𝐿𝐸 is Gaussian,
with mean equal to the true mean, and standard deviation equal to the true standard deviation
divided by the square root of n.
Figure X the distribution of parameters is related to the shape of region nearby the maximum in
the likelihood
5. Other objective functions
Despite the popularity, conceptual clarity and theoretical properties of maximum likelihood
estimation, there are (many) other objective functions and corresponding estimators that are
widely used.
Another simple, intuitive objective function is the “least squares” – simply adding up the squared
differences between the model and the data. Minimizing the sum of squared differences leads to
the maximum likelihood estimates in many cases, but not always. One good thing about least
squares estimation is that it can be applied even when your model doesn’t actually conform to a
probability distribution (or it’s very hard to write out or compute the probability distribution).
One of the most important objective functions is the so-called posterior probability and the
corresponding Maximum-Apostiori-Probability or MAP estimates/estimators. In contrast to ML
estimation, MAP estimation says: “choose the parameters so the model is most probable given
the data we observed.” Now the objective function is P(theta|X) and the equation to solve is
𝜕
𝑃(𝜃|𝑋) = 0
𝜕𝜃
Statistical modeling and machine learning for molecular biology
Alan Moses
As you probably already guessed, the MAP and ML estimation problems are related via Bayes’
theorem, so that this can be written as
𝑃(𝜃|𝑋) =
𝑃(𝜃)
𝑃(𝜃)
𝑃(𝑋|𝜃) =
𝐿
𝑃(𝑋)
𝑃(𝑋)
Once again, it is convenient to think about the optimization problem in log space, where the
objective function breaks into three parts, only two of which actually depend on the parameters.
𝜕
𝜕
𝜕
𝜕
𝜕
𝜕
log 𝑃(𝜃|𝑋) =
log 𝑃(𝜃) +
log 𝐿 −
log 𝑃(𝑋) =
log 𝑃(𝜃) +
log 𝐿 = 0
𝜕𝜃
𝜕𝜃
𝜕𝜃
𝜕𝜃
𝜕𝜃
𝜕𝜃
Interestingly, optimizing the posterior probabilility therefore amounts to optimizing the
likelihood function *plus* another term that depends only on the parameters.
The posterior probability objective function turns out to be one of a class of so-called
“penalized” likelihood functions where the likelihood is combined with mathematical functions
of the parameters to create a new objective function. As we shall see, these objective functions
turn out to underlie several intuitive and powerful machine learning methods that we will see in
later chapters.
No matter what objective function is chosen, estimation usually always involves solving a
mathematical optimization problem, and in practice this is almost always done using a computer
– either with a statistical software package such as R or Matlab, or using purpose-written codes.
Box – bias, consistency and efficiency of estimators
In order to facilitate debates about which estimators are the best, statisticians developed several
objective criteria that can be used to compare estimators. For example, it is commonly taught
that the ML estimator of the standard deviation for the Gaussian is biased. This means that for a
sample of data, the value of the standard deviation obtained using the formula given will tend to
(in this case) underestimate the “true” standard deviation of the values in the pool. On the other
hand the estimator is consistent, meaning that as the sample size drawn from the pool
approaches infinity, the estimator does converge to the “true” value. Finally, the efficiency of
the estimator describes how quickly the estimate approaches the truth as a function of the sample
size. In modern molecular biology we are generally dealing with large enough sample sizes that
we don’t really need to worry about these issues. In addition, they will almost always be taken
care of by the computer statistics package used to do the calculations. This is a great example of
a topic that is traditionally covered at length in introductory statistics courses, and is of
academic interest to statisticians, but is of no practical use in modern data-rich science.
So how do we choose an objective function? In practice as biologists we usually choose the one
that’s simplest to apply, where we can find a way to reliably optimize it. We’re not usually
interested in debating with statisticians about whether the likelihood of the model is more
important than the likelihood of the data. Instead, we want to know something about the
parameters that are being estimated- testing our hypothesis about whether this experiment yields
Statistical modeling and machine learning for molecular biology
Alan Moses
more of something than another experiment, whether something is an example of A and not B,
whether there are two groups or three, or whether A predicts B better than random. So as long as
we use the same method of estimation on all of our data, it’s probably not that important which
estimation methods we used.
Box: Bayesian estimation and prior distributions
As we have seen, the MAP objective function and more generally penalized likelihood methods
can be related to the ML objective function through the use of Bayes Theorem. For this reason
these methods sometimes are given names with the word “Bayesian” in them. However, as long
as a method results in a single estimator for parameters, it is not really Bayesian in spirit. Truly
Bayesian estimation means that you don’t try to pin down a single value for your parameters.
Instead, you embrace the fundamental uncertainty that any particular estimate for your
parameters is just one possible estimate drawn from a pool. True Bayesian statistics mean that
you consider the entire distribution of your parameters given your data and your prior beliefs
about what the parameters should be. In practice Bayesian estimation is rarely used in biology,
because biologists want to know the values of their parameters. We don’t want to consider the
whole distribution of expression levels of our gene that are compatible with the observed data:
we want to know the level of the gene.
Although Bayesian estimation is rarely used, the closely associated concepts of prior and
posterior distributions are very powerful and widely used. Because the Bayesian perspective is to
think of the parameters as random variables that need to be estimated, models are used to
describe the distributions of the parameters both before (prior) and after considering the
observations (posterior). Although it might not seem intuitive to think that the parameters have a
distribution *before* we consider the data, in fact it makes a lot of sense: we might require the
parameters to be between 0 and infinity if we are using a Poisson model for our data, or ensure
that they add up to 1 if we are using a multinomial or binomial model. The idea of prior
distributions is that we can generalize this to quantitatively weight the values of the parameters
by how likely the parameters might turn out to be. Of course, if we don’t have any prior beliefs
about the parameters, we can always use uniform distributions, so that all possible values of the
parameters are equally likely (in Bayesian jargon these are called uninformative priors).
However, as we shall see, we will find it too convenient to resist putting prior knowledge into our
models using priors.
6. Multivariate statistics
An important generalization of the statistical models that we’ve seen so far is to the case where
multiple events are observed at the same time. In the models we’ve seen so far, observations
were single events: yes or no, numbers or letters. In practice, a modern molecular biology
experiment typically measures more than one thing, and a genomics experiment might yield
measurements for thousands of things: all the genes in the genome.
A familiar example of an experiment of this kind might be a set of genome-wide expression level
measurements. In the Immgen data, for each gene, we have measurements of gene expression
over ~200 different cell types. Although in the previous chapters we considered each of the cell
Statistical modeling and machine learning for molecular biology
Alan Moses
types independently, a more comprehensive way to describe the data is that for each gene, the
observation is actually a vector, X, of length ~200, where each element of the vector is the
expression measurement for a specific cell type. Alternatively, it might be more convenient to
think of each observation as a cell type, where the observation is now a vector of 24,000 gene
expression measurements. This situation is known in statistics as “multivariate” to describe the
idea that multiple variables are being measured simultaneously. Conveniently, the familiar
Gaussian distribution generalizes to the multivariate case, expect the single numbers (scalar)
mean and variance parameters are now replaced with a mean vector and (co-)variance matrix.
𝑁(𝑋⃗|𝜇⃗, 𝚺) =
1
√|𝚺|(2𝜋)𝑑
1 ⃗⃗
𝑇 𝚺 −1 (𝑋
⃗⃗−𝜇
⃗⃗)
𝑒 −2(𝑋−𝜇⃗⃗)
Here I’ve used a small d to indicate the dimensionality of the data, so that d is the length of the
vectors u and X, and the covariance is a matrix of size d x d. In this formula, I’ve explicitly
written small arrows above the vectors and bolded the matrices. In general the machine learning
people will not do this (I will adopt this convention) and it will be left to the reader to keep track
of what are the scalars, vectors and matrices. If you’re hazy on your vector and matrix
multiplications and transposes, you’ll have to review them in order to follow the rest of this
section (and most of this book).
Mathematical box: a quick review of vectors, matrices and linear algebra
As I’ve already mentioned, a convenient way to think about multiple observations at the same
time, is to think about them as lists of numbers, which are known as vectors in mathematical
jargon. We will refer to the a list of numbers X, as a vector X = (x1, x2, x3, … xn), where n is the
“length” or dimensionality of the vector (the number of numbers in the list). Once we’ve defined
these lists of numbers, we can go ahead and define arithmetic and algebra on these lists. One
interesting wrinkle to the mathematics of lists is that for any operation we define, we have to
keep track of whether the result is actually a list or a number.
𝑋 − 𝑌 = (𝑥1 , 𝑥2 , … , 𝑥𝑛 ) − (𝑦1 , 𝑦2 , … , 𝑦𝑛 ) = (𝑥1 − 𝑦1 , 𝑥2 − 𝑦2 , … , 𝑥𝑛 − 𝑦𝑛 )
Which turns out to be a vector
𝑛
𝑋 ∙ 𝑌 = 𝑥1 𝑦1 + 𝑥2 𝑦2 + ⋯ + 𝑥𝑛 𝑦𝑛 = ∑ 𝑥𝑖 𝑦𝑖
𝑖=1
Which is a number. The generalization of algebra means that we can write equations like
𝑋−𝑌 =0
Which means that
(𝑥1 − 𝑦1 , 𝑥2 − 𝑦2 , … , 𝑥𝑛 − 𝑦𝑛 ) = (0,0, … ,0)
A shorthand way of writing n equations in one line.
Statistical modeling and machine learning for molecular biology
Alan Moses
Since mathematicians love generalizations, there’s no reason we can’t generalize the idea of lists
to also include a list of lists, so that each element of the list is actually a vector. This type of
object is what we call a matrix. A = (X1, X2, X3 …, Xm) where X1 = (x1, x2, x3, … xn). To refer to
each element of A, we can write A11, A12, A13 … A21, A22, A23 … Amn. We can then go ahead and
define some mathematical operations on matrices as well: If A and B are matrices, A – B = C
means that for all i and j, Cij = Aij – Bij.
We can also do mixtures of matrices and vectors and numbers:
𝑚
𝑚
𝑚
𝑐𝑥 + 𝐴𝑦 = (𝑐𝑥1 + ∑ 𝐴1𝑗 𝑦𝑗 , 𝑐𝑥2 + ∑ 𝐴2𝑗 𝑦𝑗 , … , 𝑐𝑥𝑛 + ∑ 𝐴𝑛𝑗 𝑦𝑗 )
𝑗=1
𝑗=1
𝑗=1
Where c is a number, x and y are vectors and A is a matrix. This turns out to be a vector.
However, there’s one very inelegant issue with the generalization to matrices: what we mean
when we refer to the value Aij depends on whether the i refers to the index in 1 through m or 1
through n. In other words, we have to keep track of the structure of the matrix. To deal with this
issue, linear algebra has developed a set of internally consistent notations, which are referred to
as the “row” or “column” conventions. So anytime I write the vector, x, by default I mean the
“column” vector
𝑥1
𝑥2
𝑋 = ( ⋮ )𝑋 𝑇 = (𝑥1
𝑥𝑛
𝑥2
… 𝑥𝑛 )
To indicate the “row” vector, I have to write the “transpose” of X, or XT. The transpose is
defined as the operation of switching all the rows and columns. So in fact there are two kinds of
products that can be defined:
𝑥1
𝑥2
𝑋 ∙ 𝑌 = 𝑋 𝑇 𝑌 = ( ⋮ )(𝑦1 𝑦2 …
𝑥𝑛
known as the “inner product”, and
𝑋𝑌 𝑇 = (𝑥1
𝑥2
𝑦𝑛 ) = ∑𝑛𝑖=1 𝑥𝑖 𝑦𝑖 , which is the familiar dot product also
𝑦1
𝑥1 𝑦1
𝑦
… 𝑥𝑛 ) ( 2 ) = ( 𝑥1 𝑦2
⋮
⋮
𝑦𝑚
𝑥1 𝑦𝑚
𝑥2 𝑦1
𝑥2 𝑦2
⋯
𝑥𝑛 𝑦1
)
⋱
𝑥𝑛 𝑦𝑚
which is the so-called “outer” product that takes two vectors and produces a matrix.
This means that X*X = XTX, which is a number. X*XT works out to: which is actually a matrix.
Although you don’t really have to worry about this stuff unless you are doing the calculations, I
will try to use consistent notation, and you’ll have to get used to seeing these linear algebra
notations as we go along.
Statistical modeling and machine learning for molecular biology
Alan Moses
Finally, an interesting point here is to consider the generalization beyond lists of lists: it’s quite
reasonable to define a matrix, where each element of the matrix is actually a vector. This object
is called a tensor. Unfortunately, as you can imagine, when we get to objects with three indices,
there’s no simple convention like “rows” and “columns” that we can use to keep track of the
structure of the objects. I will at various times in this book introduce objects with more than two
indices – especially when dealing with sequence data. However, in those cases, I won’t be able
to use the generalizations of addition, subtraction from linear algebra, because we won’t be able
to keep track of the indices. We’ll have to write out the sums explicitly when we get beyond two
indices.
Matrices also have different types of multiplications: the matrix product produces a matrix, but
there are also inner products and outer products that produce other objects. A related concept
that we’ve already used is the “inverse” of a matrix. The inverse is the matrix that multiplies to
give a matrix with 1’s along the diagonal (the so-called identity matrix, I).
1
0
𝐴𝐴−1 = 𝐼 = (
⋮
0
0
1
⋯ 0
)
⋱
1
Figure XA illustrates the idea of sampling lists of observations from a pool. Although this might
all sound complicated, multivariate statistics is easy to understand because there’s a very
straightforward, beautiful geometric interpretation to it. The idea is that we think of each
component of the observation vector (say each gene’s expression level in a specific cell type) as
a “dimension.” So if we measure the expression level of two genes in each cell type, we have
two-dimensional data. If we measure three genes, then we have three-dimensional data. 24,000
genes, then we have … you get the idea. Of course, we won’t have an easy time making graphs
of 24,000-dimensional space, so we’ll typically use 2 or 3-dimensional examples for illustrative
purposes.
Statistical modeling and machine learning for molecular biology
Alan Moses
Phenotype
x4d
…
x2 =
x4 =
…
x21
x22
x41
x42
x2d
_
_
x3 = CAG
1
x3 = T
T
A
C
G
T
Codon position 1
0
0 00
1
_
_
_
_
Gene 1 level
_
1
_
0
Aa
AA
genotype
C
T
G
_
C
Codon position 3
_
A
Gene 3 level
x2
aa
_
0
x5
_
x3 x
2 x
4
_
x1
x1
A
1
Figure – multivariate observations as vectors
In biology there are lots of other types of multivariate data, and a few of these are illustrated in
Figure XB. For example, one might have observations of genotypes and phenotypes for a sample
of individuals. Another ubiquitous example is DNA sequences: the letter at each position can be
thought of as one of the dimensions. In this view, each of our genomes represent 3 billion
dimensional vectors sampled from the pool of the human population. In an even more useful
representation, each position in a DNA (or protein) sequence can be represented as a 4 (or 20)
dimensional vector, and the human genome can be thought of as a 3 billion x 4 matrix of 1s and
0s. In these cases, the components of observations are not all numbers, but this should not stop us
from using the geometrical interpretation that each observation is a vector in a high-dimensional
space.
A key generalization that becomes available in multivariate statistics is the idea of correlation.
Although we will still assume that the observations are i.i.d., the dimensions are not necessarily
independent. For example, in a multivariate Gaussian model for cell-type gene expression, the
observation of a highly expressed gene X might make us more likely to observe a highly
expressed gene Y. In the multivariate Gaussian model, the correlation between the dimensions is
controlled by the off-diagonal elements in the covariance matrix, where each off-diagonal entry
summarizes the correlation between a pair of dimensions. Intuitively, an off-diagonal term of
zero implies that there is no correlation between two dimensions. In a multivariate Gaussian
model where all the dimensions are independent, the off-diagonal terms of the covariance matrix
are all zero, so the covariance is said to be diagonal. A diagonal covariance leads to a symmetric,
isotropic or most confusingly “spherical” distribution.
8
64
512
4096
CD8 antigen alpha chain
(expression level)
4
2
-2
-4
-2
0
2
4
mvrnorm(n = 1000, rep(0, 2), matrix(c(0.2, -0.6,mvrnorm(n
-0.6, 3), 2, [,2]
= 1000, rep(0, 2), matrix(c(4, 0, 0, 1), 2, 2))[,2]
2))[,2]
-4
-2
0
2
4
-4
-2
0
2
4
8
-4
-4
-2
0
2
4
X2
2
4
mvrnorm(n = 1000, rep(0, 2), matrix(c(4, 0, 0, 1), 2, 2))[,1]
mvrnorm(n = 1000, rep(0, 2), matrix(c(1, 0, 0, 1), 2, 2))[,1]
0
64
-2
512
0
X2
-4
CD8 antigen beta chain
(expression level)
4096
mvrnorm(n = 1000, rep(0, 2), matrix(c(1, 0.8, 0.8,
1), 2, 2))[,2]
mvrnorm(n
= 1000, rep(0, 2), matrix(c(1, 0, 0, 1), 2, 2))[,2]
Statistical modeling and machine learning for molecular biology
Alan Moses
-4
-2
0
X1
2
4
-4
-2
0
2
4
mvrnorm(n
mvrnorm(n = 1000, rep(0, 2), matrix(c(1, 0.8, 0.8, 1), 2,
2))[,1] = 1000, rep(0, 2), matrix(c(0.2, -0.6, -0.6, 3), 2, [,1]
2))[,1]
X1
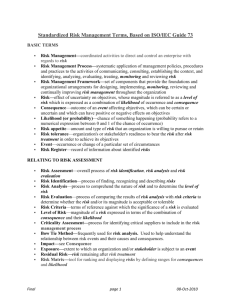
Figure – multivariate Gaussians and correlation
The panel on the left shows real gene expression data for the CD8 antigen (from ImmGen). The
panel on the right shows 4 parameterizations of the multivariate Gaussian in two dimensions. In
each case the mean is at (0,0). Notice that none of the simple Gaussian models fit the observed
CD8 expression data very well.
7. MLEs for multivariate distributions
The ideas that we’ve already introduced about optimizing objective functions can be transferred
directly from the univariate case to the multivariate case. The only minor technical complication
will arise because multivariate distributions have more parameters, and therefore the set of
equations to solve can be larger and more complicated.
To illustrate the kind of mathematical tricks that we’ll need to use, we’ll consider two examples
of multivariate distributions that are very commonly used. First, the multinomial distribution,
which is the multivariate generalization of the binomial. This distribution describes the numbers
of times we observe events from multiple categories. For example, the traditional use of this
type of distribution would be to describe the number of times each face of a die (1 through 6)
turned up. In bioinformatics it is often used to describe the numbers of each of the bases in DNA
(A, C, G, T).
If we say the X is the number of counts of the four bases, and f is a vector of probabilities of
observing each base, such that ∑𝑖 𝑓𝑖 = 1, where i indexes the four bases. The multinomial
probability for the counts of each base in DNA is given by
𝑀𝑁(𝑋|𝑓) =
(𝑋𝐴 + 𝑋𝐶 + 𝑋𝐺 +𝑋𝑇 )! 𝑋𝐴 𝑋𝐶 𝑋𝐺 𝑋𝑇 (∑𝑖∈{𝐴,𝐶,𝐺,𝑇} 𝑋𝑖 )!
𝑓𝐴 𝑓𝐶 𝑓𝐺 𝑓𝑇 =
∏𝑖∈{𝐴,𝐶,𝐺,𝑇} 𝑋𝑖 !
𝑋𝐴 ! 𝑋𝐶 ! 𝑋𝐺 ! 𝑋𝑇 !
∏
𝑖∈{𝐴,𝐶,𝐺,𝑇}
𝑓𝑖 𝑋𝑖
Statistical modeling and machine learning for molecular biology
Alan Moses
The term in front (with the factorials over the product) has to do with the number of “ways” that
you could observed, say X = (535 462 433 506) for A, C, G and T. For our purposes, (to derive
the MLEs) we don’t need to worry about this term because it doesn’t depend on the parameters,
and when take the log and then the derivative, it will disappear.
log 𝐿 = log
(∑𝑖∈{𝐴,𝐶,𝐺,𝑇} 𝑋𝑖 )!
+ log
∏𝑖∈{𝐴,𝐶,𝐺,𝑇} 𝑋𝑖 !
∏
𝑓𝑖 𝑋𝑖
𝑖∈{𝐴,𝐶,𝐺,𝑇}
However, the parameters are the fs, so the equation to solve for each one is
𝜕 log 𝐿
𝜕
=
𝜕𝑓𝐴
𝜕𝑓𝐴
∑
𝑋𝑖 log 𝑓𝑖 = 0
𝑖∈{𝐴,𝐶,𝐺,𝑇}
If we solved this equation directly, we get
𝜕 log 𝐿 𝑋𝐴
=
=0
𝜕𝑓𝐴
𝑓𝐴
Although this equation seems easy to solve, there is one tricky issue: the sum of the parameters
has to be 1. If we solved it, we’d always set each of the parameters to infinity, in which case
they would not sum up to one. The optimization (taking derivatives and setting them to zero)
doesn’t know that we’re working on a probabilistic model – it’s just a straight optimization. In
order to enforce that the parameters stay between 0 and 1, we need to add a constraint to the
optimization. This is most easily done through the method of lagrange multipliers, where we rewrite the constraint as an equation that equals zero, e.g., 1 − ∑𝑖 𝑓𝑖 = 0, and add it to the function
we are trying to optimize multiplied by a constant, the so-called lagrange multiplier, lamda.
𝜕 log 𝐿
𝜕
=
𝜕𝑓𝐴
𝜕𝑓𝐴
∑
𝑋𝑖 log 𝑓𝑖 + 𝜆 (1 −
𝑖∈{𝐴,𝐶,𝐺,𝑇}
∑
𝑓𝑖 ) = 0
𝑖∈{𝐴,𝐶,𝐺,𝑇}
Taking the derivatives gives
𝜕 log 𝐿 𝑋𝐴
=
−𝜆=0
𝜕𝑓𝐴
𝑓𝐴
Which we can solve to give
(𝑓𝐴 )𝑀𝐿𝐸 =
𝑋𝐴
𝜆
Where I have used MLE to indicate that we now have the maximum likelihood estimator for the
parameter fA. Of course, this is not very useful because it is in terms of the lagrange multiplier.
To figure out what the actual MLEs are we have to think about the constraint 1 − ∑𝑖 𝑓𝑖 = 0.
Since we need the derivatives with respect to all the parameters to be 0, we’ll get a similar
equation for fC fG and fT. Putting these together gives us:
Statistical modeling and machine learning for molecular biology
Alan Moses
(𝑓𝑖 )𝑀𝐿𝐸 =
∑
𝑖∈{𝐴,𝐶,𝐺,𝑇}
∑
𝑖∈{𝐴,𝐶,𝐺,𝑇}
𝑋𝑖
=1
𝜆
Or
𝜆=
∑
𝑋𝑖
𝑖∈{𝐴,𝐶,𝐺,𝑇}
Which says that lamda is just the total number of bases we observed. So the MLE for the
parameter fA is just
(𝑓𝐴 )𝑀𝐿𝐸 =
𝑋𝐴
∑𝑖∈{𝐴,𝐶,𝐺,𝑇} 𝑋𝑖
Which is the intuitive result that the estimate for probability of observing A is just the fraction of
bases that were actually A.
A more complicated example is to find the MLEs for the multivariate Gaussian. We’ll start by
trying to find the MLEs for the mean. As before we can write the log likelihood
𝑛
𝑛
𝑖=1
𝑖=1
1
1
log 𝐿 = log 𝑃(𝑋|𝜃) = log ∏ 𝑁(𝑋𝑖 |𝜇, Σ) = ∑ − log[|Σ|(2𝜋)𝑑 ] − (𝜇 − 𝑋𝑖 )𝑇 Σ −1 (𝜇 − 𝑋𝑖 )
2
2
Since we are working in the multivariate case, we now need to take a derivative with respect to a
vector 𝜇. One way to do this is to simply take the derivative with respect to each component of
the vector. So for the first component of the vector, we could write
𝑛
𝑑
𝑑
𝑖=1
𝑗=1
𝑘=1
𝑛
𝑑
𝜕 log 𝐿
𝜕
1
=∑
[− ∑(𝑋𝑖𝑗 − 𝜇𝑗 ) ∑(Σ −1 )𝑗𝑘 (𝑋𝑖𝑘 − 𝜇𝑘 ) ] = 0
𝜕𝜇1
𝜕𝜇1
2
𝑑
𝜕 log 𝐿
𝜕
1
=∑
[− ∑ ∑(𝑋𝑖𝑗 − 𝜇𝑗 )(Σ −1 )𝑗𝑘 (𝑋𝑖𝑘 − 𝜇𝑘 ) ] = 0
𝜕𝜇1
𝜕𝜇1
2
𝑖=1
𝑛
𝑗=1 𝑘=1
𝑑
𝑑
𝜕 log 𝐿
𝜕
1
=∑
[− ∑ ∑(Σ −1 )𝑗𝑘 (𝑋𝑖𝑗 𝑋𝑖𝑘 − 𝜇𝑗 𝑋𝑖𝑘 − 𝜇𝑘 𝑋𝑖𝑗 + 𝜇𝑗 𝜇𝑘 ) ] = 0
𝜕𝜇1
𝜕𝜇1
2
𝑖=1
𝑗=1 𝑘=1
Where I have tried to write out the matrix and vector multiplications explicitly. Since the
derivative will be zero for all terms that don’t depend on the first component of the mean, we
have
Statistical modeling and machine learning for molecular biology
Alan Moses
𝑛
𝜕 log 𝐿
1
𝜕
=− ∑
[(Σ −1 )11(−𝜇1 𝑋𝑖1 − 𝜇1 𝑋𝑖1 + 𝜇1 𝜇1 )
𝜕𝜇1
2
𝜕𝜇1
𝑖=1
𝑑
+ ∑(Σ −1 )𝑗1 (−𝜇𝑗 𝑋𝑖1 − 𝜇1 𝑋𝑖𝑗 + 𝜇𝑗 𝜇1 )
𝑗=2
𝑑
+ ∑(Σ −1 )1𝑘 (−𝜇1 𝑋𝑖1 − 𝜇𝑘 𝑋𝑖1 + 𝜇1 𝜇𝑘 ) ] = 0
𝑘=2
Because of the symmetry of the covariance matrix, the last two terms are actually the same:
𝑛
𝜕 log 𝐿
1
𝜕
=− ∑
[(Σ −1 )11 (−𝜇1 𝑋𝑖1 − 𝜇1 𝑋𝑖1 + 𝜇1 𝜇1 )
𝜕𝜇1
2
𝜕𝜇1
𝑖=1
𝑑
+ 2 ∑(Σ −1 )𝑗1 (−𝜇𝑗 𝑋𝑖1 − 𝜇1 𝑋𝑖𝑗 + 𝜇𝑗 𝜇1 ) ] = 0
𝑗=2
Differentiating the terms that do depend on the first component of the mean gives
𝑛
𝑑
𝑖=1
𝑗=2
𝜕 log 𝐿
1
= − ∑ [(Σ −1 )11 (−2𝑋𝑖1 + 2𝜇1 ) + 2 ∑(Σ −1 )𝑗1 (−𝑋𝑖𝑗 + 𝜇𝑗 ) ] = 0
𝜕𝜇1
2
𝑛
𝑑
𝑖=1
𝑗=2
𝜕 log 𝐿
= − ∑ [(Σ −1 )11 (−𝑋𝑖1 + 𝜇1 ) + ∑(Σ −1 )𝑗1 (−𝑋𝑖𝑗 + 𝜇𝑗 ) ] = 0
𝜕𝜇1
Merging the first term back in to the sum, we have
𝑛
𝑑
𝑛
𝜕 log 𝐿
= − ∑ [∑(−𝑋𝑖𝑗 + 𝜇𝑗 )(Σ −1 )𝑗1 ] = − ∑(𝜇 − 𝑋𝑖 )𝑇 (Σ −1 )1 = 0
𝜕𝜇1
𝑖=1 𝑗=1
𝑖=1
Where I have abused the notation somewhat to write the first column of the inverse covariance
matrix as a vector,(Σ −1 )1 .
[Alternative derivation]
Since the derivative will be zero for all terms that don’t depend on the first component of the
mean, we have
𝑛
𝑑
𝑑
𝑑
𝑑
𝑖=1
𝑘=1
𝑗=1
𝑘=1
𝑗=1
𝜕 log 𝐿
1
= − ∑ [− ∑(Σ −1 )1𝑘 𝑋𝑖𝑘 − ∑(Σ −1 )𝑗1 𝑋𝑖𝑗 + ∑(Σ −1 )1𝑘 𝜇𝑘 + ∑(Σ −1 )𝑗1 𝜇𝑗 ] = 0
𝜕𝜇1
2
Statistical modeling and machine learning for molecular biology
Alan Moses
Notice that all of these sums are over the same thing, so we can factor them and write
𝑛
𝑑
𝑑
𝑖=1
𝑘=1
𝑘=1
𝜕 log 𝐿
1
= − ∑ [− ∑[(Σ −1 )1𝑘 + (Σ −1 )𝑘1 ]𝑋𝑖𝑘 + ∑[(Σ −1 )1𝑘 + (Σ −1 )𝑘1 ]𝜇𝑘 ] = 0
𝜕𝜇1
2
𝑛
𝑑
𝜕 log 𝐿
1
= − ∑ [∑(−𝑋𝑖𝑘 + 𝜇𝑘 )[(Σ −1 )1𝑘 + (Σ −1 )𝑘1 ]] = 0
𝜕𝜇1
2
𝑖=1 𝑘=1
Because the covariance is symmetrical, (Σ −1 )1𝑘 = (Σ −1 )𝑘1, and we have
𝑛
𝑑
𝑛
𝜕 log 𝐿
1
= − ∑ [∑ 2(−𝑋𝑖𝑘 + 𝜇𝑘 )(Σ−1 )1𝑘 ] = ∑(𝜇 − 𝑋𝑖 )𝑇 (Σ −1 )1 = 0
𝜕𝜇1
2
𝑖=1 𝑘=1
𝑖=1
Where I have abused the notation somewhat to write the first column of the inverse covariance
matrix as a vector,(Σ −1 )1 and multiplied both sides by -1, so as not to bother with the negative
sign. Notice the problem: although were trying to find the MLE for the first component of the
mean only, we have an equation that includes all the components of the mean through the offdiagonal elements of the co-variance matrix. This means we have a single equation with d
variables and unknowns, which obviously cannot be solved uniquely. However, when we try to
find the maximum likelihood parameters, we have to set *all* the derivatives with respect to all
the parameters to zero, and we will end up an equations like this for each component of the
mean. This implies that we will actually have a set of d equations for each of the d components
of the mean, each involving a different row of the covariance matrix. We’ll get a set of
equations like
𝑛
𝜕 log 𝐿
= ∑(𝜇 − 𝑋𝑖 )𝑇 (Σ −1 )2 = 0
𝜕𝜇2
𝑖=1
"…"
𝑛
𝜕 log 𝐿
= ∑(𝜇 − 𝑋𝑖 )𝑇 (Σ −1 )𝑑 = 0
𝜕𝜇𝑑
𝑖=1
We can write the set of equations as
𝑛
𝜕 log 𝐿
= ∑(𝜇 − 𝑋𝑖 )𝑇 Σ −1 = 0
𝜕𝜇
𝑖=1
Where the 0 is now the vector of zeros for all the components of the mean. To solve this
equation, we note that the covariance matrix does not depend on i, so we can simply multiply
each term of the sum and the 0 vector by the covariance matrix. We get
Statistical modeling and machine learning for molecular biology
Alan Moses
𝑛
𝜕 log 𝐿
= ∑(𝜇 − 𝑋𝑖 )𝑇 = 0
𝜕𝜇
𝑖=1
The equation can be solved to give
𝑛
∑ 𝑋𝑖 𝑇 = 𝑛𝜇 𝑇
𝑖=1
Or the familiar
𝑛
1
𝜇 = ∑ 𝑋𝑖 𝑇
𝑛
𝑇
𝑖=1
Which says simply that the MLEs for the components of the mean are simply the averages of the
observations in each dimension.
It turns out that there is a much faster way of solving these types of problems using so-called
vector (or matrix) calculus. Instead of working on derivatives of each component of the mean
individually, we will use clever linear algebra notation to write all of the equations in one line by
using the following identity:
𝜕 𝑇
[𝑥 𝐴𝑥] = 𝑥 𝑇 (𝐴 + 𝐴𝑇 )
𝜕𝑥
Where A is any matrix, and the derivative is now a derivative with respect to a whole vector, x.
Using this trick, we can proceed directly (remember that for a symmetric matrix like the
covariance 𝐴 = 𝐴𝑇 )
𝑛
𝑛
𝑛
𝑖=1
𝑖=1
𝑖=1
𝜕 log 𝐿
𝜕
1
1
=
∑ − (𝜇 − 𝑋𝑖 )𝑇 Σ −1 (𝜇 − 𝑋𝑖 ) = ∑ (𝜇 − 𝑋𝑖 )𝑇 2Σ −1 = ∑(𝜇 − 𝑋𝑖 )𝑇 Σ −1 = 0
𝜕𝜇
𝜕𝜇
2
2
Similar matrix calculus tricks can be used to find the MLEs for (all the components of) the
𝜕
covariance matrix. If you know that 𝜕𝐴 log |𝐴| = (𝐴−1 )𝑇 and
𝜕
𝜕𝐴
[𝑥 𝑇 𝐴𝑥] = 𝑥𝑥 𝑇 , where again A
is a matrix and x is a vector, it’s not too hard to find the MLEs for the covariance matrix. In
general, this matrix calculus is not something that biologists (or even bioinformaticians) will be
familiar with, so if you ever have to differentiate your likelihood with respect to vectors or
matrices, you’ll probably have to look up the necessary identities.
8. Hypothesis testing revisited – the problems with high dimensions.
Since we’ve just agreed that what biologists are usually doing is testing hypotheses, we usually
think much more about our hypothesis tests than about our objective functions. Indeed, as we’ve
seen already, it’s even possible to do hypothesis testing without specifying parameters or
objective functions, (non-parameteric tests).
Statistical modeling and machine learning for molecular biology
Alan Moses
Although I said that statistics has a straightforward generalization to high-dimensions, in practice
the most powerful idea from hypothesis testing, namely, the P-value, does not generalize very
well. This has to do with the key idea that the P-value is the probability of observing something
as extreme *or more.* In high-dimensional space, it’s not clear which direction the “or more” is
in. For example, if you observed 3 genes average expression levels (7.32, 4.67, 19.3) and you
wanted to know whether this was the same as these genes’ average expression levels in another
set of experiments (8.21, 5.49, 5.37), you could try to form a 3-dimensional test statistic, but it’s
not clear how to sum up the values of the test statistic that are more extreme than the ones you
observed- you have to decide which direction(s) to do the sum. Even if you decide which
direction you want to sum up each dimension, performing these multidimensional sums is
practically difficult as the number of dimensions becomes large.
The simplest way to deal with hypothesis testing in multivariate statistics is just to do a
univariate test on each dimension, and pretend they are independent. If any dimension is
significant, then (after correcting for the number of tests) the multivariate test must also be
significant. In fact, that’s what we were doing in the previous chapter when we used Bonferroni
to correct the number of tests in the gene set enrichment analysis. Even if the tests are not
independent this treatment is conservative, and in practice, we often want to know in which
dimension the data differed. In the case of gene set enrichment analysis, we don’t really care
whether ‘something’ is enriched – we want to know what exactly is the enriched category.
However, there are some cases where we might not want to simply treat all the dimensions
independently. A good example of this might be a time-course of measurements or
measurements that are related in some natural way, like length and width of an iris petal. If you
want to test whether one sample of iris petals is bigger than another, you probably don’t want to
test whether the length is bigger and then whether the height is bigger. You want to combine
both into one test. Another example might be if you’ve made pairs of observations and you want
to test if their ratios are different, but the data include a lot of zeros, so you can’t actually form
the ratios. One possibility is to create a new test statistic and generate some type of empirical null
distribution (as described in the first chapter). However, another powerful approach is to
formulate a truly multivariate hypothesis test: a likelihood ratio test.
formally:
•
The observations (or data) are X1, X2, … XN , which we will write as a vector X
•
H0, is the null hypothesis, and H1 is another hypothesis. The two hypotheses make
specific claims about the parameters in each model. For example, H0 might state that θ = φ,
some particular values of the parameters, while H1 might state that θ ≠ φ (i.e., that the
parameters are anything but φ).
•
The likelihood ratio test statistic is -2 log [ p(X| θ = φ)/ p(X| θ ≠ φ) ], where any
parameters that are not specified by the hypotheses (i.e., free parameters) have been set to their
maximum likelihood values. (This means that in order to perform a likelihood ratio test, it is
necessary to be able to obtain maximum likelihood estimates, either numerically or analytically).
Statistical modeling and machine learning for molecular biology
Alan Moses
•
Under the null hypothesis the likelihood ratio test statistic is chi square distributed, with
degrees of freedom equal to the difference in the number of free parameters between the two
hypotheses.
Example of LRT for multinomial: GC content in genomes
The idea of the likelihood ratio test is that when two hypotheses (or models) describe the same
data using different numbers of parameters, the one with more free parameters will always
achieve a slightly higher likelihood because it can fit the data better. However, the amazing
result is that the improvement in fit that is due simply to chance is predicted by the chisquare
distribution (which is always positive). If the model with more free parameters fits the data
better than the improvement expected by chance, then we should accept that model.
The likelihood ratio test is an example of class of techniques that are widely used in machine
learning to decide if adding more parameters to make a more complex model is “worth it” or if it
is “over fitting” the data with more parameters than are really needed. We will see other
examples of techniques in this spirit later in this book.
Excercises:
1.
2.
3.
4.
What is the most probable value under a univariate Gaussian distribution? What is its
probability?
Use the joint probability rule to argue that a multivariate Gaussian with diagonal covariance is nothing but the product of univariate Gaussians.
Show that the average is also the MLE for the parameter of the Poisson distribution.
Explain why this is consistent with what I said about the average of the Gaussian
distribution in Chapter 1.
Fill in the components of the vectors and matrices for the part of the multivariate
1
Gaussian distribution: 2 (𝜇 − 𝑋𝑖 )𝑇 Σ −1 (𝜇 − 𝑋𝑖 ) = [
5.
6.
⋯][
][ ]
⋱
⋮
Derive the MLE for the covariance matrix of the multivariate Gaussian (use the
matrix calculus tricks I mentioned in the text).
Why did we need lagrange multipliers for the multinomial MLEs, but not for the
Guassian MLEs ?