The Convergence Prediction method for Genetic and PBIL
advertisement

1
The Convergence Prediction method
for Genetic and PBIL-like algorithms
with binary representation
Eugene A. Sopov, Sergey A. Sopov
Abstract— Genetic algorithms (GA) are stochastic search
procedures which have been used for solving many complex
optimization problems. It’s obvious that GA collect and exploit
some statistical information about the search space, but this
information isn’t processed in explicit way. In this paper we
consider GA with binary representation and its explicit statistics
in a form of probability distribution of unit-values. The binary
GA convergence property is discussed and a new convergence
prediction method is proposed. The results of the prediction
algorithm effectiveness investigation over the set of complex
continuous and discrete deceptive problems are presented.
Index Terms—Genetic algorithms, Estimation of Distribution
Algorithms, convergence prediction, binary representation.
the population. Many EDA algorithms are based upon such
kind of distribution [4, 5, 6, 7]
The main goal of this investigation is to increase the binary
GA effectiveness by analyzing and exploiting explicit
information of the algorithm dynamics via distribution
estimation.
II. DISTRIBUTION ESTIMATION FOR BINARY GENETIC
ALGORITHMS
To present the statistics processing by GA we estimate the
probabilities vector of a population as:
k
k
k
k
k
P ( p1 ,..., pn ), pi P( xi 1), i 1, n
(1)
k
here p i is a probability of unit-value for i-th position in a
I. INTRODUCTION
solution, k is a generation number, n is a solution length, x j is
HERE is a necessity of complex system models
development in many fields of science and technology.
The modelling raises many optimization problems which are
multiextremal, multiobjective and have implicit objectives,
complex feasible area structure, many types of variables, etc.
These complex optimization problems cannot be solved with
the classical optimization procedures. Thus we have to design
and implement more effective and versatile methods such as
genetic algorithms [1].
A well-known approach to GA parameters set reduction is
the Estimation of Distribution Algorithms (EDA), sometimes
called the Probabilistic Model-Building Genetic Algorithms,
which replaces population representation with a probability
distribution over the choices available at each position in the
vector that represents a population member [2, 3]. The EDA
generate solutions and control populations according to given
distribution instead of using nature-inspired genetics-based
operations.
A straightforward way to estimate distribution for GA with
binary representation is to use the unit-value distribution over
a value of j-th gene of i-th individual, k is a number of
generation (iteration).
We can write down the generalized scheme of the EDA
algorithm using the given probability distribution in the
following way:
1. Randomly generate the initial population according to the
probability distribution.
2. Evaluate current population.
3. Update the distribution using the given strategy.
4. Form a new population according to the probability
distribution.
5.
Until
stop
criterion
is
satisfied,
repeat
steps 2-4.
T
Manuscript received May 10, 2011.
E. A. Sopov is with the Department of System Analysis and Operations
Research, Siberian State Aerospace University named after academician
M.F.
Reshetnev,
Krasnoyarsk,
Russian
Federation
(e-mail: es_gt@mail.ru).
S. A. Sopov is with the Department of System Analysis and Operations
Research, Siberian State Aerospace University named after academician
M.F.
Reshetnev,
Krasnoyarsk,
Russian
Federation
(e-mail: es_gt@mail.ru).
i
As we can see, GA use the same scheme. The main
differences take a place with steps 3-4, when GA update
information using such operations as selection, crossover and
mutation. Step 3 also defines the different EDA algorithms.
Let’s consider some EDA realizations.
Variable probabilities method (“MIVER”) was first
proposed in [4] and improved in [5]. This is a stochastic
optimization procedure for pseudo-boolean problems, which
operates with a set (a population) of binary solution. The
distribution update strategy is based on unit-value distribution
of the best (and/or the worst) solution in certain population.
There exists a number of strong mathematical convergence
proofs for some classes of optimization problems.
Population-based incremental learning (PBIL) was
proposed in [6]. This is a combination of evolutionary
2
optimization and artificial neural networks learning technique.
PBIL updates the distribution in the same way as “MIVER”
does – according to unit-value distribution of the best and the
worst solution.
Both PBIL and “MIVER” use greedy linear update strategy
(taking into account only the best/worst solution), so they
demonstrate much more local convergence than standard GA
do. Thus standard GA performance on average is better for
many complex optimization problems.
Probabilities-based GA was proposed in [7]. It’s a further
evolution of the ideas of Variable probabilities method and
PBIL. In this algorithm genetic operators are not substituted
with distribution estimation, but estimated distribution is used
to model genetic operators. Probabilities-based GA uses the
whole population information to update distribution, so it
demonstrates as global performance as standard GA do.
Moreover it contains less parameters to tune and process
additional information about the search space (probabilities
distribution), thus probabilities-based GA exceeds standard
GA on average.
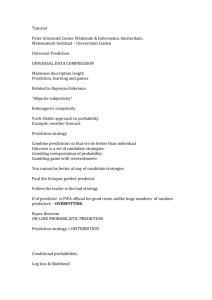
We have investigated the performance of algorithms using a
visual representation of distribution. Each component value of
probability vector, which performs distribution, varies during
the run, so we can show it on diagram (fig.1-4).
As we can see the probability value oscillates about
p 0.5 (initial steps, uniform distribution over the search
space) and then converges to value one (or zero in other case)
as the algorithm converges to optimal (or suboptimal)
solution.
We can estimate and visualize distribution of unit-values for
any binary GA, even if GA doesn’t use such distribution in the
run:
1 N i
x j , j 1, n (2)
P p1 , , pn , p j Px j 1
N i 1
where N is a population size.
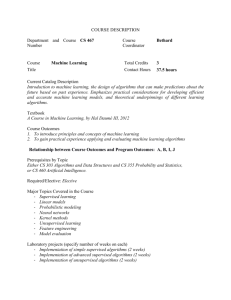
As different algorithms use different distribution update
strategies, so we obtain different behavior of probabilities
dynamics during the run (fig.1-4).
Analyzing these diagrams with different optimization
problems we can find that the components of the probabilities
vector frequently converge to value one if optimal solution
contains unit-value in corresponding position (or to zero if
optimal solution contains zero value). It means that if
probability converges to one (or zero), the value of
corresponding gene of optimal solution most probably is equal
to one (or zero). The higher algorithm performance the more
often probabilities converge to the correct value.
Fig. 2: Evolution of the probability vector component for a typical run of
PBIL.
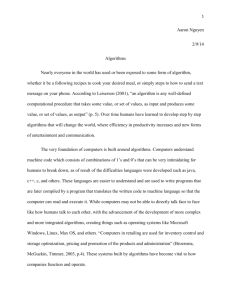
Fig. 3: Evolution of the probability vector component for a typical run of the
Probabilities-based GA.
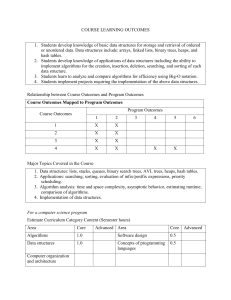
Fig. 4: Evolution of the probability vector component for a typical run of
Standard GA.
III. CONVERGENCE PREDICTION METHOD
We describe the convergence feature of stochastic binary
algorithms as:
opt
pi 1, if xi 1,
(3)
opt
pi 0, if xi 0,
opt
for algorithm's iteration number converges infinity. Here xi
is the i-th position value of the problem optimal solution, i =
1, n .
So we can use this feature to predict the optimal solution of
the given problem. The convergence prediction method is:
1. Choose the binary stochastic algorithm (e.g. GA, PBIL or
other), set the iteration number i 1,..., I and the number of
independent algorithm run s 1,..., S .
2. Collect the statistics ( p j ) i , j 1,..., n . Average ( p j ) i
s
over s. Determine the tendency for p j change.
1, if p j 1,
opt
3. Set x j
.
0, if p j 0
A simple way to determine the convergence tendency is to
use the following integral criterion on step 3:
1, if I ( p ) 0.5 0,
j i
i 1
xj
0, otherwise
opt
Fig. 1: Evolution of the probability vector component for a typical run of the
Variable probabilities method (“MIVER”).
(4)
The main idea is that the more often probability value is
greater than 0.5, the higher probability of optimal solution to
be equal to one.
3
Unfortunately, in many real-world problems there is a
situation when binary stochastic algorithm collects not enough
information on the early steps and the gene value of certain
position is equal to one (or zero) for almost every individual.
But at the final stage algorithm can find the much better
solution with inverted values of gene and it means that the
probability vector values will change their convergence
direction.
We propose to use the following modification of
convergence prediction algorithm to solve above mentioned
problem:
1. Set the prediction step K.
2. Every K iteration use the given statistics P i , i 1, N K ,
N K t K , t 1,2, , to evaluate the probability vector
change: P i P i P i 1 .
3. Set the weights for every iteration accordingly to its
number: i 2 i N K N K 1 , i 1, , N K .
4. Evaluate probability vector weighted change as:
NK
i Pi .
~
P ~
pj
i 1
5. Set the optimal solution:
p j 0,
1, if ~
opt
xj
0, otherwise
6. Add the optimal solution in the current population. Stop
the run and set the predicted solution as optimal or continue
algorithm run to find better solution.
The main idea of the given modification is that the
probability values on the later iterations have the greater
weights as algorithm collects more information about the
search space. The weights should have values such that
i 1 i and
NK
i
1.
i 1
IV. CONVERGENCE AND DECEPTIVE PROBLEMS
The practice has shown us that GA are very effective on
many real-world problems, so GA researchers need to
construct special test functions, which are real challenge for a
certain algorithm. In a field of GA, these test functions are
deceptive functions [9, 10].
The deceptive functions design is based upon the building
blocks hypothesis [1] - the problems are GA-hard (GAdifficult) or deceptive [11].
It is necessary to notice that deceptive trap functions are a
class of specially constructed functions, which consider how
genetic search works – so standard GA have no opportunity to
escape such traps in principle. In this work we supply GA with
additional operation, which can be called a strong inversion.
The inversion takes place in natural systems. Holland in
[12] describes this operation as inversion of gene order in a
selected segment of chromosome. The strong inversion for the
binary representation is a bit-inversion for all positions in a
chromosome.
It’s obviously that in a real-world problem we cannot
identify if a local optimum is the trap, so the strong inversion
can destroy all useful genes in a chromosome. To avoid this
harmful effect we should use the strong inversion with very
low probability (e.g. 𝑝𝑖𝑛𝑣𝑒𝑟𝑡 ∈ {0.001; 0.01}) in a manner of
mutation. It means that if there are no traps in a search space,
the inverted solution probably will have low fitness and its
genes will be eliminated from population. In a case, GA fall
into a trap, the inverted solution provides the total escape (for
simple problems) or new genes with better fitness.
V. TEST PROBLEMS AND NUMERICAL EXPERIMENTS
We have tested the proposed convergence prediction
algorithms for discussed EDA and standard GA with a
representative set of complex optimization problems.
Continuous optimization problems. We have included 12
internationally known test problems, and 6 of them are from
the test function set approved at Special Session on RealParameter Optimization, CEC’05 [8]. The test problem set
contains the following functions: Rastrigin and Shifted
Rotated Rastrigin, Rosenbrock, Griewank, De Jong 2,
“Sombrero” (another name is “Mexican Hat”), Schekel,
Katkovnik, Additive Potential function, Multiplicative
Potential function and 2 one-dimensional multiextremal
functions.
Deceptive Trap functions. A variety of deceptive problems
are based on the function of unitation, which is defined as
number of ones in chromosome. We have included the
following functions in test set: Trap on Unitation (with
Ackley, Whitley and Goldberg parameters), Trap-4, Trap-5,
DEC2TRAP, Liepins and Vose.
To estimate algorithms efficiency we have carried out a
series of independent run of each algorithm for each test
problem. We used reliability as a criterion to evaluate
algorithm efficiency. Reliability is the percentage of
successful algorithm run (i.e. exact solution of the problem
was found) over the whole number of independent runs.
We have set the following parameters values for algorithms:
Accuracy (binary solution length) – 100,
Population size – 200,
Generation number – 500,
Independent run number – 100.
The special parameters for each algorithm (e.g. selection in
GA, learning rate in PBIL and others) are chosen to be
efficient on average over function set.
Table 1 presents efficiency estimation results for modified
convergence prediction algorithm.
As the probabilities-based GA exceeds standard GA, PBIL
and MIVER, below we demonstrate results only for the
probabilities-based GA.
The investigation shows that the probabilities-based GA
cannot find the global optimum solution on the given test
functions set with chromosome length greater than 20 bits.
The reliability is equal to zero even with fine tuning the
algorithm parameters (the same situation with other
algorithms). The probabilities-based GA rapidly falls into the
local trap optimum and cannot overcome its attraction.
4
Next we have investigated the probabilities-based GA with
the strong inversion and the prediction algorithm. The
prediction takes place through each 10 generation, the
predicted solution replaces the worst individual. At the final
generation we fulfill the complete prediction over the whole
run.
TABLE I
THE RELIABILITY ESTIMATION FOR MODIFIED
CONVERGENCE PREDICTION ALGORITHM
Problem
Rastrigin
Shifted Rotated
Rastrigin
Rosenbrock
Griewank
De Jong 2
Sombrero
Schekel
Katkovnik
Additive
potential
Multiplicative
potential
Onedimensional
N1
Onedimensional
N2
88
Prob.based GA
98
Standard
GA
94
28
40
72
50
24
10
8
22
28
36
41
51
28
55
62
100
80
100
70
60
30
100
38
58
22
56
70
100
76
100
98
100
28
100
86
98
70
98
75
100
MIVER
PBIL
61
The stochastic search algorithms are not random walk
through the search space, they have a purposeful behavior. We
have demonstrates in the paper, that stochastic search
procedures with binary representation (GA, PHIL and others)
can be analyzed through visualization of its estimated
distribution dynamics. We have proposed the efficient method
to predict the point of convergence (optimal solution) using
the results of distribution analysis.
Two approaches were investigated: a simple way of using
integral criterion and more complex strategy with contribution
weights calculation. As numerical experiments shows the
modified convergence prediction provides the better
performance, even for algorithms with greedy search strategy
and local behavior.
It’s clear that the proposed prediction strategy is
straightforward and there are situations, which lead to
incorrect prediction. We have demonstrates that the slight
modification of the base algorithms can overcome such GAhard problem as deceptiveness.
In further work we suppose to develop the prediction and its
implementations with other EDA and evolutionary algorithms
and investigate this approach with a variety of test problems,
which are the challenge for the search algorithms
REFERENCES
86
100
80
100
TABLE II
THE RELIABILITY AND AVERAGE EVALUATION NUMBER ESTIMATION OF
THE PROBABILITIES-BASED GA WITH INVERSION AND PREDICTION FOR
DECEPTIVE AND TRAP FUNCTIONS
Prob.-based GA with
inversion
Problem
42
41
53
61
38
78
aver.
evaluation
number
37862
42891
27771
31463
38332
15712
51
39871
reliability
Ackley Trap
Whitley Trap
Goldgerg Trap
Trap-4
Trap-5
DEC2TRAP
Liepins
and
Vose
VI. CONCLUSIONS
Prob.-based GA with
inversion and
prediction
aver.
reliaevaluability
tion
number
46
28732
40
38701
55
25981
62
23712
45
32778
98
15899
50
33520
The results are shown in a Table 2. As we can see, the
modification with the strong inversion is able to overcome the
attraction of the trap, so the algorithm can find the global
optimum. In cases when the probabilities-based GA with
prediction yields, its reliability is also is high and has
comparable values. When we add predicted solution every 10
generation in a population, the probabilities-based GA solves
the given problem with less evaluations of the objective
function.
[1]
Goldberg, D.E., 1989, Genetic Algorithms in Search, Optimization and
Machine Learning, Addison-Wesley.
[2] Muehlenbein, H., Paas, G., 1996, From Recombination of Genes to the
Estimation of Distribution. Part 1, Binary Parameter, Lecture Notes in
Computer Science 1141, Parallel Problem Solving from Nature, pp.
178-187.
[3] Larraenaga, P., Lozano, J.A., 2001. Estimation of Distribution
Algorithms: A New Tool for Evolutionary Computation, Kluwer
Academic Publishers.
[4] Antamoshkin, A.N., 1986. Brainware for search pseudoboolean
optimization, Pr. of 10th Prague Conf. on Inf. Theory, Stat. Dec.
Functions, Random Processes - Prague: Academia.
[5] Antamoshkin, A.N, Saraev, V.N., 1987. The method of variable
probabilities", in Problemy sluchaynogo poiska (Problems of random
search), Riga: Zinatne, (in Russian).
[6] Baluja, S., 1994. Population-Based Incremental Learning: A Method for
Integrating Genetic Search Based Function Optimization and
Competitive Learning, Technical Report CMU-CS-94-163, Carnegie
Mellon University.
[7] Semenkin, E.S., Sopov, E.A., 2005. Probabilities-based evolutionary
algorithms of complex systems optimization, In Intelligent Systems
(AIS’05) and Intelligent CAD (CAD-2005), Moscow, FIZMATLIT (in
Russian, abstract in English).
[8] Suganthan, P.N., Hansen, N. et al., 2005. Problem Definitions and
Evaluation Criteria for the CEC 2005 Special Session on Real-Parameter
Optimization, Technical Report, Nanyang Technological University,
Singapore and KanGAL Report Number 2005005, Kanpur Genetic
Algorithms Laboratory, IIT Kanpur.
[9] Deb, K., Goldberg, D.E., 1992. Analysing deception in trap functions. In
Foundations of Genetic Algorithms 2, D. Whitley (Ed.), San Mateo:
Morgan Kaufmann.
[10] Whitley, L. D., 1991. Fundamental principles of deception in genetic
search. In Foundations of Genetic Algorithms, G. J. E. Rawlins (Ed.),
San Mateo, CA: Morgan Kaufmann.
[11] Wilson, S.W., 1991. GA-easy does not imply steepest-ascent
optimizable. Proceedings of the Fourth International Conference of
Genetic Algorithms (pp. 85-89). San Mateo, CA: Morgan Kaufmann.
[12] Holland, J.H., 1975. Adaptation in natural and artificial systems, Ann
Arbor. MI: University of Michigan Press.