Caroline Jones 13JLB
Mathematical derivations of Kepler's Laws of Planetary
Motion and the equations of planetary orbits
Contents
1.
Introduction ............................................................................................................ 1
2.
Ellipses .................................................................................................................... 2
i.
Cartesian form .................................................................................................... 2
ii.
The elliptical properties of Jupiter’s orbit........................................................... 5
iii.
Polar form........................................................................................................ 6
3.
Kepler’s First Law .................................................................................................... 8
4.
Kepler’s Second Law ............................................................................................. 12
5.
Kepler’s Third Law ................................................................................................ 13
6.
Conclusion ............................................................................................................ 15
7.
Bibliography .......................................................................................................... 16
1. Introduction
I have always been fascinated by the popular science of Astrophysics, mainly
from watching programs of Stephen Hawking and Brian Cox. From very on in the
history of the human race, people have been perplexed by astrological phenomena,
therefore it is one of the very oldest branches of Physics, making it a very interesting
subject to study historically as well. It was also often associated with Philosophy,
another of my favourite subjects, with some of the most ancient Astronomers also
studying Philosophy (such as Thales, Anaximander and Aristotle), as both disciplines
were considered to be some of the highest branches of academia.
I was introduced to Kepler’s Laws in my Physics lessons, where we learnt a
simple derivation for Kepler’s Third Law using equations of motion. I found the
concept interesting, but the proof unsatisfying. This is because this particular proof
approximates the equation of a planet’s orbit to a circle, whereas Kepler’s
First Law tells us that orbits are ellipses. I therefore wanted to find a more
general derivation that showed that Kepler’s Third Law is true for all
ellipses, not just specific to circles. For this reason, I decided to research
how Kepler’s Laws of Planetary Motion1 can be mathematically derived.
These derivations are fascinating for me as they combine two
of my favourite topics in maths – geometry and calculus. Researching
planetary orbits led me to examine conic sections: the shapes
formed from the intersection of a plane and a circular cone at
different angles, as shown in Figure 12. Kepler’s Laws looks
specifically at ellipses, and over the course of this essay I
Figure 1 Diagram of conic sections
1
2
"Kepler's Laws." Hyperphysics. N.p., n.d. Web. 9 Oct. 2014.
"File:Conic Sections.svg." Wikipedia. Wikimedia Foundation, 22 July 2014. Web. 12 Oct. 2014.
Caroline Jones 13JLB
will explore the properties of ellipses and their link to the orbits of planets, using
predominately calculus and algebra to prove Kepler’s three laws. In doing so, my aim
is to make the mathematics and physics of the derivations clear to understand for an
audience of my peers studying Maths and Physics at Higher Level, as this is not
covered by the standard curriculum, and not something that I have been able to find
in the many sources I consulted. I hope to share my enthusiasm and make the ideas
that I describe clear and engaging.
Over the course of this essay, I aim to make sense of the following:
How equations of circles and ellipses come about, in different coordinate
systems
Kepler’s First Law: The orbit of a planet is an ellipse with the Sun at one of the
two foci.
Kepler’s Second Law: A line segment joining a planet and the Sun sweeps out
equal areas during equal intervals of time.
Kepler’s Third Law: The square of the orbital period of a planet is
proportional to the cube of the semi-major axis of its orbit.
2. Ellipses
i.
Cartesian form
Kepler’s Laws of Planetary motion are rules that describe the orbits of
planets, therefore it seems necessary to me to first explore the equations that can
model the orbit of planetary motion.
Figure 2 Graph of circle
In their most basic form, the orbits of planets are
approximated to circles, which are modelled by the equation:
𝑥2 + 𝑦2 = 𝑟2
where r is the radius of the circle, the centre of the circle is
the origin, and (𝑥, 𝑦) is any point on the circle. I do not think I
will need to consider the more complicated equation for a
circle not centred on the origin, with centre (𝑎, 𝑏), because in
a planetary system we can define the centre to be anywhere,
therefore it is convenient to use the origin.
Figure 2 shows an example of a circle with radius of 1.
However, orbits are more accurately defined by ellipses, modelled by the Cartesian
equation (named after the mathematician and philosopher René Descartes):
𝑥2 𝑦2
+
=1
𝑎2 𝑏 2
where a is the horizontal semi-axis (the distance from the centre to the point on the
ellipse with the same y-coordinate),
b is the vertical semi-axis (the distance from the centre to the point on the ellipse
with same x-coordinate),
and the centre of the ellipse is the origin.
This can be confusing as “axis” is usually associated with the x-axis, which is a line
against which we measure other shapes, whereas here the semi-axes are distances.
Caroline Jones 13JLB
Although many books derive this by using
trigonometry, I think it is possible to derive this
equation rather neatly using only
transformations of the equation for a circle. In
𝑥
an equation, replacing 𝑥 by 𝑎 corresponds to a
stretch of scale factor 𝑎 in the horizontal
𝑦
direction, and replacing 𝑦 by 𝑏 corresponds to a
stretch of scale factor 𝑏 in the vertical direction.
Figure 3 Graph of ellipse
Semi-minor axis, b
Semi-major axis, a
One of the semi-axes will be the semimajor axis (a), which is the point furthest from the centre, and one will be the semiminor axis (b), which is the point closest to the centre. It is conventional to draw the
horizontal semi-axis as the semi-major axis and the vertical as the semi-minor axis; it
is helpful to have conventions likes this in Maths as it aids mathematicians in making
descriptions of shapes universally understandable.
Figure 3 shows a graph of an ellipse, with 𝑎 = 3, 𝑏 = 2.
The area of an ellipse is given by
𝐴 = 𝜋𝑎𝑏
If we use the idea of obtaining the shape of an ellipse using coordinate
transformations, this formula is also easy to derive. The area of a circle of radius 1
around the origin is 𝜋, and when we stretch the semi-major axis by scale factor 𝑎,
and the semi-minor axis by scale factor 𝑏, this becomes 𝜋𝑎𝑏.
An ellipse can also be defined by two points called its foci3, which always lie
along the semi-major axis. An ellipse with foci 𝐹1 and 𝐹2 has the property that for any
point P on the ellipse, |𝑃𝐹1 | + |𝑃𝐹2 | = constant, as depicted in the Figure 4. This
constant is equal to 2𝑎. We can understand
P(𝒙, 𝒚)
this by imagining when the point P is at 𝑦 =
|𝑃𝐹2 |
0 and 𝑥 is negative, |𝑃𝐹2 | = 𝑎 + 𝑓, and
|𝑃𝐹1 | = 𝑎 − 𝑓. Therefore |𝑃𝐹1 | + |𝑃𝐹2 | =
|𝑃𝐹1 |
2𝑎. We can deduce from this that the
distance from 𝐹2 to the positive y-axis is 𝑎,
as it is half the sum of the distances from
𝑥
distance
the foci to the point on the ellipse.
to F2, f
Furthermore, I wish to prove|𝑃𝐹1 | +
|𝑃𝐹2 | ≡ 2𝑎 as follows, using a proof that
my Maths teacher helped me to derive. If
we define the point P to be (𝑥, 𝑦) then
using Pythagoras, we know that |𝑃𝐹1 | =
Figure 4 Ellipse showing formulation for eccentricity
√(−𝑓 − 𝑥)2 + 𝑦 2 and |𝑃𝐹2 | =
√(𝑓 − 𝑥)2 + 𝑦 2
∴ |𝑃𝐹1 | + |𝑃𝐹2 |
= √(𝑓 + 𝑥)2 + 𝑦 2 + √(𝑓 − 𝑥)2 + 𝑦 2
3
"Foci (focus Points) of an Ellipse." Math Open Reference. N.p., n.d. Web. 16 Oct. 2014.
Caroline Jones 13JLB
I shall now try to rewrite the first square root all in terms of 𝑎, 𝑏 and 𝑥, using
the Pythagorean relationship that we can see in Figure 4 that 𝑓 2 = √𝑎2 − 𝑏 2 and
𝑥2
𝑦2
rearranging 𝑎2 + 𝑏2 = 1 to get 𝑦 = 𝑏 2 −
𝑥2 𝑏2
𝑎2
:
2
(𝑓 + 𝑥)2 + 𝑦 2 = (√𝑎2 − 𝑏 2 + 𝑥) + (𝑏 2 −
𝑥 2 𝑏2
)
𝑎2
This simplifies as follows:
(√𝑎2
−
𝑏2
𝑥 2 𝑏2
+ 𝑥) + (𝑏 − 2 )
𝑎
2
2
= 𝑎2 − 𝑏 2 + 𝑥 2 + 2𝑥 √𝑎2 − 𝑏 2 + 𝑏 2 −
𝑥 2𝑏2
𝑎2
𝑎2 − 𝑏 2
) + 2𝑥√𝑎2 − 𝑏 2 + 𝑎2
𝑎2
𝑥 2 (𝑎2 − 𝑏 2 ) + 2𝑥√𝑎2 − 𝑏 2 𝑎2 + 𝑎4
=
𝑎2
2
(𝑥√𝑎2 − 𝑏 2 +𝑎2 )
=
𝑎2
Similarly therefore we know that the second square root will rearrange and simplify
to:
= 𝑥2 (
So |𝑃𝐹1 | + |𝑃𝐹2 | is equal to:
(−𝑥√𝑎2 − 𝑏 2 +𝑎2 )
𝑎2
2
2
2
2
2
2
2
2
2
√(𝑥√𝑎 − 𝑏 +𝑎 ) + √(−𝑥√𝑎 − 𝑏 +𝑎 )
𝑎2
𝑎2
𝑥√𝑎2 − 𝑏 2 +𝑎2 −𝑥√𝑎2 − 𝑏 2 +𝑎2
=
+
𝑎
𝑎
2𝑎2
=
𝑎
∴ |𝑃𝐹1 | + |𝑃𝐹2 | = 2𝑎
These notions of the foci of ellipses will link to Kepler’s First Law of planetary
motion, which states that the orbit of a planet is an ellipse with the Sun at one of the
two foci.
An important property of an ellipse will be its eccentricity, which can be
thought of as how much a conic section deviates from being circular. Eccentricity (let
us call it e) is defined by the following equation:
𝑓
𝑒=𝑎
as shown in Figure 44. For an ellipse 0 < e < 1, and in the case that e = 0 the equation
is a circle, since the focus has a distance of zero from the centre.
Alternatively, the eccentricity can be found using the following property
(which will later be used in Kepler’s Third Law):
4
"Eccentricity an Ellipse - Math Open Reference." Eccentricity an Ellipse - Math Open Reference. N.p.,
n.d. Web. 17 Oct. 2014.
Caroline Jones 13JLB
𝑏 2 = 𝑎2 (1 − 𝑒 2 )
𝑓
We can show this beginning with the relation 𝑒 = 𝑎 and (using Pythagoras)
substituting in 𝑎2 = 𝑓 2 + 𝑏 2 :
√𝑎2 − 𝑏 2 = 𝑒 × 𝑎
𝑎2 − 𝑏 2 = 𝑒 2 𝑎2
𝑏 2 = 𝑎2 − 𝑒 2 𝑎2
∴ 𝑏 2 = 𝑎2 (1 − 𝑒 2 )
ii.
The elliptical properties of Jupiter’s orbit
The links between all of these variables and properties is better seen using an
example, so I shall try to model the orbit of Jupiter using these equations and
plotting these values on autograph.
Semi-major axis, a = 778.57 x 106 km
= 5.203 AU
(where AU is Astronomical Units, a unit of length defined as the distance from the
Earth to the Sun)
Eccentricity, e = 0.048
In order to find the distance of the focus to the centre, we can use the
𝑓
equation 𝑒 = 𝑎, and substitute in other known equations and values until everything
is in terms of f.
𝑓
𝑒=
𝑎
∴𝑓 =𝑒×𝑎
𝑓 = 0.048 × 5.203
∴ 𝑓 = 0.250 AU to 3dp
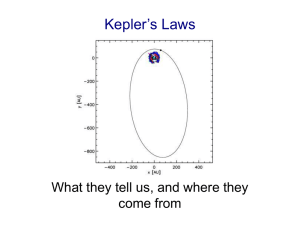
Now that we have the
Figure 5 Graph of Jupiter’s orbit
distance to the foci, we can also
work out the semi-minor axis, since
(using Figure 4) we can see that 𝑎, 𝑏
and 𝑓 have a Pythagorean
Semi-minor axis, b
relationship:
𝑏 = √𝑎2 − 𝑓 2
= √5.2032 − 0.2502
Semi-major axis, a
= 5.197 𝐴𝑈 𝑡𝑜 3𝑑𝑝
Foci (one of
which is the Sun)
I have then plotted a graph
on Autograph in order to visualise
this data, shown in Figure 5.
However since the eccentricity is
very small, the orbit does not look
very noticeably elliptical. Therefore
𝑥2
𝑦2
perhaps it would have been better
+
=1
2
5.203
5.1972
to have chosen a planet with greater
Jupiter: 5
5
"Jupiter Fact Sheet." Jupiter Fact Sheet. N.p., n.d. Web. 3 Oct. 2014.
Caroline Jones 13JLB
eccentricity, for example Pluto (which I am delighted to be able to describe as a planet
again having been officially reinstated)!
I have drawn arrows showing the semi-axes, and plotted and marked the
points for the foci (one of which would be the Sun, according to Kepler’s First Law).
iii.
Polar form
However, an ellipse can also be defined using the polar equation – which is a
different way of expressing the same shape.
Using Figure 66, let us start by defining 𝐹1 (or the Sun) to be
the origin, and 𝐹2 to be the point (2𝑓, 0) – meaning that it is a
distance of 2𝑓 from 𝐹1 on the x-axis. Normally mathematicians use
the 𝑐 instead of 𝑓, but I thought I would use 𝑓 for the sake of
consistency, as this is how I have previously defined the distance
from a focus to the origin, therefore the distance between the foci
is 2𝑓. We also define 𝑃𝐹1 to be the vector 𝑟⃗, therefore 𝑃𝐹2 is
Figure 6 Ellipse showing vectors to point P
𝑟⃗ − 2𝑓𝑖⃗ (where 𝑖⃗ is the horizontal unit vector).
We know that |𝑃𝐹1 | + |𝑃𝐹2 | = 2𝑎, therefore:
|𝑟⃗| + |𝑟⃗ − 2𝑓𝑖⃗| = 2𝑎
Since |𝑟⃗| = 𝑟, we can work out that |𝑟⃗ − 2𝑓𝑖⃗| = 𝑟 − 2𝑎, and so now, to get
rid of the modulus signs, we can say that:
(𝑟 − 2𝑎)2 = |𝑟⃗ − 2𝑓𝑖⃗|2
The vector 𝑟⃗ can also be written by its polar co-ordinates as (𝑟 cos 𝜃 , 𝑟 sin 𝜃)
(𝑟 − 2𝑎)2 = (𝑟 cos 𝜃 − 2𝑓)2 + (𝑟 sin 𝜃)2
Note that the change in the horizontal component of 2𝑓 is subtracted from other
horizontal component (ie. 𝑟 cos 𝜃) and not the vertical component (ie. 𝑟 sin 𝜃). We
can now rearrange to make the equation in terms of 𝑟.
𝑟 2 − 4𝑎𝑟 + 4𝑎2 = 𝑟 2 (cos 𝜃)2 − 4𝑟𝑓 cos 𝜃 + 4𝑓 2 + 𝑟 2 (sin 𝜃)2
2
𝑟 − 4𝑎𝑟 + 4𝑎2 = 𝑟 2 (cos 𝜃)2 − 4𝑟𝑓 cos 𝜃 + 4𝑓 2 + 𝑟 2 {1 − (cos 𝜃)2 }
−4𝑎𝑟 + 4𝑎2 = −4𝑟𝑓 cos 𝜃 + 4𝑓 2
−𝑎𝑟 + 𝑟𝑓 cos 𝜃 = −𝑎2 + 𝑓 2
𝑟(−𝑎 + 𝑓 cos 𝜃) = −𝑎2 + 𝑓 2
−𝑎2 + 𝑓 2
𝑟=
−𝑎 + 𝑓 cos 𝜃
|𝑃𝐹
|
|𝑃𝐹
|
Since
1 +
2 = 2𝑎, we can imagine when the point P is on the positive
y-axis, meaning that the distance 𝑎 is the hypotenuse of the sides 𝑓 and 𝑏. Therefore
𝑏 2 = 𝑎2 − 𝑓 2 . Therefore:
𝑏2
𝑟=
𝑎 − 𝑓 cos 𝜃
𝑏2
𝑎
∴𝑟=
𝑓
1 − 𝑎 cos 𝜃
𝑓
We have already defined the eccentricity to be 𝑎, therefore:
𝑏2
𝑎
𝑟=
1 − 𝑒 cos 𝜃
6
"Kepler's 2nd Law: The Speeds of Planets." - Windows to the Universe. N.p., n.d. Web. 10 Nov. 2014.
Caroline Jones 13JLB
The semi-latus rectum (𝑟0 ) is the length
of the segment perpendicular to the major axis
through one of the foci to the ellipse, as shown
in Figure 77 The semi-latus rectum is equal to
Figure 7 Semi-latus rectum
𝑟0
𝑏2
, as I shall try to prove.
Since the eccentricity is the ratio of the
distance to the foci from the origin and the
𝑓
semi-major axis (ie. 𝑒 = 𝑎), the distance to the
foci can be said to be 𝑓 = 𝑎𝑒, meaning that the coordinates for the two foci are at
(𝑎𝑒, 0) and (−𝑎𝑒, 0). Since the semi-latus rectum is the segment perpendicular to
the the semi-major axis to the ellipse, the equation of this line segment is just 𝑥 =
𝑎𝑒 or 𝑥 = −𝑎𝑒. The intersection of these equations with the ellipse is the end point
of the semi-latus rectum, therefore the y-coordinate is the length 𝑟0 . So we can
substitute in 𝑥 = 𝑎𝑒 into the Cartesian equation for the ellipse:
(𝑎𝑒)2 𝑦 2
+ 2=1
𝑎2
𝑏
𝑎2 𝑦 2 = 𝑎2 𝑏 2 − 𝑎2 𝑒 2 𝑏 2
𝑦 2 = 𝑏2 − 𝑒 2𝑏2
𝑦 2 = 𝑏 2 (1 − 𝑒 2 )
As we have already stated that 𝑎2 = 𝑓 2 + 𝑏 2 , we can substitute in 𝑓 = 𝑎𝑒 to
get
𝑎2 = (𝑎𝑒)2 + 𝑏 2
∴ 𝑏 2 = 𝑎2 (1 − 𝑒 2 )
𝑎
𝑏2
Substituting 𝑎2 = (1 − 𝑒 2 ) into the previous equation:
𝑏4
𝑦2 = 2
𝑎
𝑏2
∴𝑦=
𝑎
𝑏2
∴ 𝑟0 =
𝑎
Therefore substituting this into the previous equation for an ellipse, 𝑟 =
the polar equation for an ellipse can be given by:
𝑟0
𝑟=
1 − 𝑒 cos 𝜃
Two other important features of an ellipse are the
apoapsis (the longest distance 𝑟+ from a focus to ellipse)
and the periapsis (the shortest distance 𝑟− from a focus
to the ellipse). Looking at Figure 88 we can see that both
the longest and shortest distances are going to lie on the x-axis.
At the apoapsis and periapsis, the distance from the focus to
the x-axis is equal to 𝑟± = 𝑎(1 ± 𝑒).
7
8
"Ellipse." Online Math Help. N.p., n.d. Web. 21 Nov. 2014.
"Apoapsis." -- from Wolfram MathWorld. N.p., n.d. Web. 10 Nov. 2014.
𝑏2
𝑎
1−𝑒 cos 𝜃
𝒓+
,
𝒓−
Figure 8 Apoapsis and periapsis
Caroline Jones 13JLB
This can be proven using some of the properties of an ellipse that I looked at
earlier, rearranging the equation 𝑏 2 = 𝑎2 (1 − 𝑒 2 ) to give 𝑒 = √
𝑎2 −𝑏2
𝑎2
and
substituting this in to our equation for 𝑟+ and 𝑟− :
𝑟± = 𝑎 (1 ± √
𝑎2 − 𝑏2
)
𝑎2
𝑟± = 𝑎 ± √𝑎2 − 𝑏 2
𝑟± = 𝑎 ± 𝑓
This makes sense as it states that from either focus, the distance to the point on
the ellipse cutting the x-axis is equal to the distance travelled to the centre (∓𝑓),
plus the length of the semi-major axis (𝑎).
After having looked at ellipses and their relation to Kepler, I would now like to
look at a mathematical derivation of Kepler’s First Law. I will be basing my derivation
on a paper that worked through it with very little detail, whilst adding in more detail
in order it make it accessible to other students.
3. Kepler’s First Law
The total energy 𝐸 for a body in orbit can be given by
𝐸 = Kinetic energy + Potential energy
1
𝐺𝑀𝑚
= 2 𝑚𝑣 2 − 𝑟
where m is the mass of the body in orbit, M is the mass of the star being orbited, v is
the velocity of the orbit, and G is the universal gravitational constant.
Looking at Figure 99 which depicts this
system, we can break the velocity into two
components:
𝑑𝑟
radial component of velocity =
𝑑𝑡
= 𝑟̇
perpendicular component of velocity = 𝑟𝜔
(where ω is the angular velocity)
𝑑𝜃
= 𝑟 𝑑𝑡
Figure 9 Diagram of planet in orbit of star
= 𝑟𝜃̇
These two components are orthogonal
(meaning that they are at right angles to one another) therefore Pythagoras’
Theorum can be used: the square of the total velocity is equal to the sum of the
squares of the componants.
1
𝐺𝑀𝑚
∴ 𝐸 = 𝑚(𝑟̇ 2 + 𝑟 2 𝜃̇ 2 ) −
2
𝑟
Now if we look at the equation for angular momentum, L, we know that
𝐿 = mass × angular velocity
∴ 𝐿 = 𝑚𝑟 2 𝜔
9
Astronomy, A1 Dynamical. Proof of Kepler’s First Law from Newtonian Dynamics (n.d.): n. pag. Web.
1 Nov. 2014.
Caroline Jones 13JLB
= 𝑚𝑟 2 𝜃̇
1
We shall now create the substitution that 𝜌 = 𝑟 , so that
𝑚𝜃̇
𝐿= 2
𝜌
𝐿𝜌2
∴ 𝜃̇ =
𝑚
𝑑𝜃
Remembering that 𝜃̇ = 𝑑𝑡 , we can integrate with respect to 𝑡 to get an expression
for 𝜃:
𝐿
𝜃 = ∫ 𝜌2 𝑑𝑡
𝑚
𝐿
𝑑𝑡
= ∫ 𝜌2
𝑑𝜌
𝑚 𝑑𝜌
Using related rates of change we can simplify this, as
𝑑𝑟 𝑑𝑟 𝑑𝜌
=
×
𝑑𝑡 𝑑𝜌 𝑑𝑡
1
𝑑𝑟
1
and 𝑟 = 𝜌 implies that 𝑑𝜌 = − 𝜌2, therefore
𝑑𝑟
1 𝑑𝜌
=− 2
𝑑𝑡
𝜌 𝑑𝑡
𝑑𝑟
So substituting in this value for 𝑑𝑡 (or 𝑟̇ ):
𝐿
𝜃 = −∫
𝑑𝜌
𝑚𝑟̇
This gives us the equation in which we will eventually substitute in an equation for 𝑟̇ .
We shall now put this aside for now and return to our equation for the total
energy, which rearranges as follows:
1
𝐺𝑀𝑚
𝐸 = 𝑚(𝑟̇ 2 + 𝑟 2 𝜃̇ 2 ) −
2
𝑟
2𝐸
2𝐺𝑀
2
2 ̇2
= 𝑟̇ + 𝑟 𝜃 −
𝑚
𝑟
2𝐸
2𝐺𝑀
𝑟̇ 2 =
+
− 𝑟 2 𝜃̇ 2
𝑚
𝑟
It is now convenient to substitute in the equation previously established 𝜃̇ =
𝐿𝜌2
in order to get rid of the 𝜃̇, as this has no place in the final equation for an ellipse.
𝑚
2𝐸 2𝐺𝑀
𝐿𝜌2 2
2
𝑟̇ =
+
−𝑟 (
)
𝑚
𝑟
𝑚
1
Since 𝑟 = 𝜌, 𝑟 2 and 𝜌2 cancel out, we can therefore say:
2
2𝐸 2𝐺𝑀 𝐿2 𝜌2
+
− 2
𝑚
𝑟
𝑚
We now make two new substitutions, as this equation has many variables
that are not relevant in the equation of an ellipse in polar co-ordinates, and lack two
vital parameters: 𝑟0 and 𝑒. Therefore we need to use equations connecting some of
the current variables to these constants, which should eventually rearrange to
produce the equation for an ellipse.
𝑟̇ 2 =
Caroline Jones 13JLB
The first equation10 we can use is
𝐿2
𝑟0 =
𝐺𝑀𝑚2
and the second equation11 is
2𝐸𝑟0
𝐺𝑀𝑚
both of which can be derived using the Conservation of Energy, although I will not do
so, as the proof of these equations are not directly relevant. I had initially hoped to
be able to explain them by suggesting how they are intuitively correct, but I could
not find any instinctive reason as to why these are true, therefore I will not include
any derivations for either equations but have included links to explanations in the
footnotes.
Rearranging the equation for 𝑟̇ 2 into an equation for 𝑟̇ with more relevant
parameters for an ellipse:
2𝐸 2𝐺𝑀 𝐿2 𝜌2
𝑟̇ 2 =
+
− 2
𝑚
𝑟
𝑚
𝐿2
𝐿
We can take out the 𝑚2 and square root the whole equation, as 𝑚 will cancel
𝑒2 = 1 +
𝐿
out when we eventually plug the equation for 𝑟̇ into 𝜃 = − ∫ 𝑚𝑟̇ 𝑑𝜌.
1
2
𝐿 2𝐸𝑚 2𝐺𝑀𝜌𝑚2
2
𝑟̇ = { 2 +
−
𝜌
}
𝑚 𝐿
𝐿2
𝐿2
We can use the substitute here that 𝑟0 = 𝐺𝑀𝑚2,
1
2
𝐿 2𝐸𝑚 2𝜌
𝑟̇ = { 2 +
− 𝜌2 }
𝑚 𝐿
𝑟0
1
2
𝐿 2𝐸𝑚
1
1
2𝜌
𝑟̇ = { 2 + 2 − 2 +
− 𝜌2 }
𝑚 𝐿
𝑟0
𝑟0
𝑟0
1
𝐿2
𝐿 2𝐸𝑚
1
1 2 2
𝑟̇ = { 2 + 2 − (𝜌 − ) }
𝑚 𝐿
𝑟0
𝑟0
Rearranging 𝑟0 = 𝐺𝑀𝑚2 to make 𝐿2 the subject, we can substitute again to get
1
2 2
𝐿
2𝐸
1
1
{
+ 2 − (𝜌 − ) }
𝑚 𝑟0 𝐺𝑀𝑚 𝑟0
𝑟0
2𝐸
1
Ideally we now want to make 𝑟 𝐺𝑀𝑚 + 𝑟 2 into one fraction, as this will make
𝑟̇ =
0
0
subsitution easy, therefore we can multiple the top and the bottom of the first
fraction by 𝑟0 :
1
𝐿
2𝐸𝑟0
1
1 2 2
𝑟̇ = { 2
+
− (𝜌 − ) }
𝑚 𝑟0 𝐺𝑀𝑚 𝑟0 2
𝑟0
And rewrite this as:
10
"Orbital Docking Dynamics." AIAA Journal 1.6 (1963): 1360-364. Web. 17 Nov. 2014.
"Solar System Astronomy, Lecture Number 7." Solar System Astronomy, Lecture Number 7. N.p.,
n.d. Web. 17 Nov. 2014.
11
Caroline Jones 13JLB
1
2
2𝐸𝑟0
𝐿 𝐺𝑀𝑚 + 1
1 2
𝑟̇ = {
− (𝜌 − ) }
𝑚
𝑟0 2
𝑟0
2𝐸𝑟
And conveniently our other substitution, 𝑒 2 = 1 + 𝐺𝑀𝑚0 , can easily be used here:
1
𝐿 𝑒2
1 2 2
𝑟̇ = { 2 − (𝜌 − ) }
𝑚 𝑟0
𝑟0
1
2 2
2
𝑟̇ =
𝐿 𝑒
1
{( ) − (𝜌 − ) }
𝑚 𝑟0
𝑟0
𝐿
1
It is important here that we have written 𝑟̇ in the form 𝑚 {𝑎2 − 𝑏 2 }2 , as now
when we substitute 𝑟̇ into 𝜃 = − ∫
1
𝐿
𝑚𝑟̇
𝑑𝜌, the L and m will cancel out and we can
𝑥
𝑑𝑥 = cos −1 (𝑎) as follows:
𝐿
𝜃 = −∫
𝑑𝜌
2
2
𝐿
𝑒
1
𝑚 × 𝑚 √(𝑟 ) − (𝜌 − 𝑟 )
0
0
use the general rule that ∫ √𝑎2
−𝑥2
𝜃 = −∫
1
2
√( 𝑒 ) − (𝜌 − 1 )
𝑟0
𝑟0
1
𝜌−𝑟
𝑑𝜌
2
0
𝑒 )
𝑟0
Finally this can be rearranged to form the polar co-ordinates of an ellipse,
with the the origin (defined to be the Sun) at one of its foci, which is Kepler’s First
Law.
1
𝜌−𝑟
0
𝑒 = cos 𝜃
𝑟0
𝜌𝑟0 − 1
= cos 𝜃
𝑒
𝜌𝑟0 − 1 = 𝑒 cos 𝜃
𝑟0
− 1 = 𝑒 cos 𝜃
𝑟
𝑟0
= 1 + 𝑒 cos 𝜃
𝑟
𝑟0
𝑟=
1 + 𝑒 cos 𝜃
𝜃 = cos −1 (
Caroline Jones 13JLB
4. Kepler’s Second Law
Due to the nature of an ellipse, at some points in the orbit the planet will be
experience stronger gravitational force than at others, as gravitational force is a
function of the distance between the two masses. This causes the planet to travel at
a faster velocity at some points (when it is close to the Sun) and slower at others
(when it is further away from the Sun). However Kepler’s Second Law is very
statisfying in my opinion, as it states that an imaginary line segment joining a planet
and the Sun always sweeps out equal areas during equal intervals of time. This can
be demonstrated best on a diagram, as shown in Figure 1012.
Equal Areas
Equal lengths of time
Figure 10 Diagram visualising Kepler’s 2nd Law
This seems logical when considered as, when the planet is furthest from the
Sun, it will have a smaller velocity, therefore cover a small distance in a given time
period. However the distance from the Sun will be greater, so the other dimension of
the triangle will be larger. Equally, when close to the Sun, the distance from the Sun
is obviously smaller but the velocity will be greater, so the displacement about the
Sun will be greater in the same given time period. Therefore it is easy to believe that
Kepler’s Second Law should be approximately true once told, but slightly more
difficult to prove. I shall try to do so below, using infentissimals and calculus.
In Figure 1113, we see the two successive
positions (A and B) of a planet in orbit in a time
𝑑𝑡, with a changing distance to the Sun, which we
shall call 𝑟. In this time it has moved through
𝑑𝜃
𝑟 × 𝑑𝜃
displacement 𝑑𝑠, and therefore travelled through
an angle 𝑑𝜃.
A line segment from B can be drawn to a
point C such that BC is perpendicular to SB, in
Figure 11 Orbit showing properties
order that AC is the change in radius, 𝑑𝑟.
of a movement of a planet
Using trigonometry, we can state that 𝐵𝐶 =
𝑟 sin 𝑑𝜃. However as ds becomes infinitely small, BC becomes perpendicular to SC
12
13
"5 Minute Lesson: Kepler's 2nd Law." The Very Spring and Root. N.p., n.d. Web. 3 Nov. 2014.
"Kepler's Laws." N.p., n.d. Web. 3 Nov. 2014.
ds
𝑑𝑟
Caroline Jones 13JLB
as well as to SB, meaning we can approximate the distance BC to 𝑟 × 𝑑𝜃, as for any
very small angle 𝛼, sin 𝛼 tends to 𝛼.
Like in the derivation for Kepler’s First Law, we will resolve the velocity into
two components:
𝑑𝑟
radial component of velocity =
= 𝑟̇
𝑑𝑡
perpendicular component of velocity = 𝑟𝜔
The area swept out in time 𝑑𝑡 is the area of a triangle (not sector) ABS
because as curve AB becomes infentessimally small, it will tend to the segment AB
for very small 𝑑𝜃. As distance AB (𝑑𝑠) becomes infentissimally small, the area of
triangle ABS becomes equivalent to the area of triangle BCS, with base 𝑟 × 𝑑𝜃 and
height 𝑟.
∴ Area swept out in time 𝑑𝑡, 𝑑𝐴 = Area of 𝐵𝐶𝑆
1
= 2 base×height
1
= 𝑟 2 𝑑𝜃
2
1 2 𝑑𝜃
= 𝑟
𝑑𝑡
2 𝑑𝑡
1
= 𝑟 2 𝜔𝑑𝑡
2
𝑑𝐴 1 2
∴
= 𝑟 𝜔
𝑑𝑡 2
As I stated in Kepler’s First Law, the angular momentum 𝐿 of a system in orbit
is equal to 𝑚𝑟 2 𝜔, so
𝑑𝐴
𝐿
=
𝑑𝑡 2𝑚
𝑑𝐴
∴
∝𝐿
𝑑𝑡
Newton’s Laws state that “the rate of change of angular momentum is equal
to the torque of the forces acting on the system”, where torque is a force causing
rotation. For a planet orbitting the Sun, torque is zero, therefore angular momentum
𝐿
must remain constant.We can therefore define 2𝑚 as a constant, 𝑘.
𝑑𝐴
∴
=𝑘
𝑑𝑡
As the rate of change of area is constant through time, equal ares are swpt
out in equal times, which is Kepler’s Second Law.
5. Kepler’s Third Law
Finally I wish to prove Kepler’s Third Law in two ways: first from a simple
rearrangement of equations of forces and motions, which approximates an orbit to
circular. The second will be a more complex mathematical derivation from Kepler’s
Second Law, which will be more accurate as orbits (as previously discussed) are
ellipses not a circles.
Kepler’s Third Law is that the square of the time period 𝑇 for an object to
complete one full orbit is proportional to the cube of its semi-major axis: 𝑇 2 ∝ 𝑎3 .
The first method uses Newton’s law of gravity, which states that the
gravitational force F between two bodies can be defined as follows:
Caroline Jones 13JLB
𝐺𝑀𝑚
𝑟2
where G is the universal gravitational constant, M is the mass of the object being
orbited, m is the mass of the object in orbit, and r is the distance between the two.
It is also known that the centripetal force of an object in circular motion is:
𝑚𝑣 2
𝐹=
𝑟
where m and r are the same paramaters, and v is its velocity. Note that this
derivation is using the equation for circular motion – therefore approximating the
planetary orbit to be circular, whereas in actual fact it is elliptical. Therefore this is a
less reliable proof of Kepler’s Third Law, but does show that the same law would be
true for hypothetical planets in circular orbits.
Since the centripetal force is provided by gravity, we know that these two
forces stated are equal, therefore:
𝐺𝑀𝑚 𝑚𝑣 2
=
𝑟2
𝑟
which simplies to:
𝐺𝑀
= 𝑣2
𝑟
Kepler’s involves time period T, therefore we need to substitute in an
2𝜋𝑟
equation with T. We should therefore use 𝑣 = 𝑇 , which states that the velocity is
the total distance travelled in one orbit (therefore for a circle, this is 2𝜋𝑟) divided by
the time taken to complete this orbit (ie. time period T). Note again that this uses
the approximation of an orbit to be a circle, where velocity is constant.
𝐺𝑀
2𝜋𝑟 2
=(
)
𝑟
𝑇
𝐺𝑀 4𝜋 2 𝑟 2
∴
=
𝑟
𝑇2
4𝜋 2 𝑟 3
∴ 𝑇2 =
𝐺𝑀
Both G and M are constants for a system of a planet orbitting a star,
𝐹=
therefore 𝑇 2 ∝ 𝑟 3, where the constant is
4𝜋 2
𝐺𝑀
.
This proof clearly has its limitations however, since it only proves that for a
circlular orbit Kepler’s Third Law will apply, therefore I now wish to use a different
derivation, which starts with Kepler’s Second Law:
𝑑𝐴
𝐿
=
𝑑𝑡 2𝑚
Since the right-hand side of this equation is constant, we know
𝐿
Total area, 𝐴 =
𝑇
2𝑚
where T is the time period.
As I stated when examining the properties of ellipses, the standard equation
for an ellipse is
𝐴 = 𝜋𝑎𝑏
𝜋𝑎𝑏
𝐿
∴
=
𝑇
2𝑚
Caroline Jones 13JLB
Now we put this equation aside for a while, and look at the equation for an
ellipse:
𝑟0
1 + 𝑒 cos 𝜃
𝐿2
We can substitute in the equation 𝑟0 = 𝐺𝑀𝑚2 that we used in Kepler’s First
Law, to make:
𝐿2
𝑟=
𝐺𝑀𝑚2 (1 + 𝑒 cos 𝜃)
At the periapsis, 𝜃 = 0 and 𝑟 = 𝑎(1 − 𝑒), as derived earlier when looking at
ellipses. Therefore:
𝐿2
𝑎(1 − 𝑒) =
𝐺𝑀𝑚2 (1 + 𝑒)
From this, we can get an expression for angular momentum in terms of the
properties of an ellipse and the objects in the system:
𝐿2 = 𝑎(1 − 𝑒)𝐺𝑀𝑚2 (1 + 𝑒)
𝐿2
∴ 2 = 𝑎(1 − 𝑒 2 )𝐺𝑀
𝑚
𝜋𝑎𝑏
𝐿
Returning to our equation 𝑇 = 2𝑚, we can square this and combine it with
this new equation as follows:
𝜋 2 𝑎2 𝑏 2
𝐿2
=
𝑇2
4𝑚2
2 2 2
𝜋 𝑎 𝑏
𝑎(1 − 𝑒 2 )𝐺𝑀
=
𝑇2
4
Now we can use the relation 𝑏 2 = 𝑎2 (1 − 𝑒 2 ),
𝜋 2 𝑎2 𝑎2 (1 − 𝑒 2 ) 𝑎(1 − 𝑒 2 )𝐺𝑀
=
𝑇2
4
𝑟=
This simplifies as follows:
𝜋 2 𝑎2 𝑎2 𝑎𝐺𝑀
=
𝑇2
4
2 3
4𝜋
𝑎
𝑇2 =
𝐺𝑀
∴ 𝑇 2 ∝ 𝑎3
This has successfully proven Kepler’s Third Law for ellipses: the square of the
time period T is proportional to the cube of the semi-major axis a.
6. Conclusion
Overall I have found the derivations for Kepler’s Laws of Planetary motion
incredibly satisfying as they can prove conceptual ideas to a high degree of certainty.
Kepler’s Second Law, for example, I think is fairly intuitive that the area should be
roughly constant, but I find it fascinating that we can prove that it is precisely
constant, which to me really highlights the elegance of maths and physics. These
proofs have also emphasised to me how dealing with abstract operators can have
physical significance – particularly how the ideas of calculus and geometry that I
have studied from a purely mathematical perspective can be linked to concepts in
my Physics syllabus. Although the rearrangement of the equations during the
Caroline Jones 13JLB
process may seem fairly abstract, it is amazing to see how they can link together far
more conceptual ideas that tell us how the Universe works. These equations also
have practical implications in allowing scientists to predict the movement of planets,
and therefore to adjust trajectories of satellites or probes to use the gravitational
pull of celestial bodies in order to maximise efficiency. If I had had more time I would
have liked to examine this further, perhaps by modelling the slingshot effect, as this
would give me an insight into how knowledge of orbits can be useful in conserving
fuel.
During my exploration I have also developed a sense for how complicated
derivations can be, since it seems that all 3 of Kepler’s equations were reliant on
other derivations and ideas that I needed to prove along the way, which was a
weakness of this approach. For example many of the parameters of an ellipse
required individual examination so that I could be satisified that I understood the
proof as a whole. Furthermore there were also a few physics equations that I have
not looked at in my Higher Level syllabus that I did not have an opportunity to fully
derive, which was a shame. If I were to do my exploration again, I might have spent
more time looking at these physics equations. However overall I feel very satisfied
that I have understood the maths used and have been fascinated to see how the
concepts I study in Maths lessons are applied in the real world, and I have also
greatly enjoyed the challenge of teaching myself material about conic sections.
7. Bibliography
"5 Minute Lesson: Kepler's 2nd Law." The Very Spring and Root. N.p., n.d. Web. 3
mmmmNov. 2014.
"Apoapsis." -- from Wolfram MathWorld. N.p., n.d. Web. 10 Nov. 2014.
Astronomy, A1 Dynamical. Proof of Kepler’s First Law from Newtonian Dynamics
mmmm (n.d.): n. pag. Web. 1 Nov. 2014.
"Eccentricity an Ellipse - Math Open Reference." Eccentricity an Ellipse - Math Open
mmmmReference. N.p., n.d. Web. 17 Oct. 2014.
"Ellipse." Online Math Help. N.p., n.d. Web. 21 Nov. 2014.
"File:Conic Sections.svg." Wikipedia. Wikimedia Foundation, 22 July 2014. Web. 12
mmmmOct. 2014.
"Foci (focus Points) of an Ellipse." Math Open Reference. N.p., n.d. Web. 16 Oct.
mmmm2014.
"Jupiter Fact Sheet." Jupiter Fact Sheet. N.p., n.d. Web. 3 Oct. 2014.
“Kepler's 2nd Law: The Speeds of Planets." - Windows to the Universe. N.p., n.d.
mmmmWeb. 10 Nov. 2014.
"Kepler's Laws." N.p., n.d. Web. 3 Nov. 2014.
"Kepler's Laws." Hyperphysics. N.p., n.d. Web. 9 Oct. 2014.
"Solar System Astronomy, Lecture Number 7." Solar System Astronomy, Lecture
mmmmNumber 7. N.p., n.d. Web. 17 Nov. 2014.
"Orbital Docking Dynamics." AIAA Journal 1.6 (1963): 1360-364. Web. 17 Nov. 2014.
 0
0
advertisement
Related documents


Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users