ADC 8 Topics Docs
advertisement

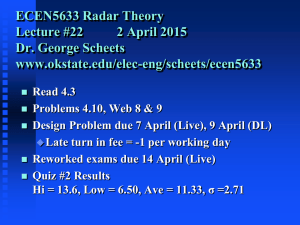
Vestigial sideband (VSB) A vestigial sideband (in radio communication) is a sideband that has been only partly cut off or suppressed. Television broadcasts (in analog video formats) use this method if the video is transmitted in AM, due to the large bandwidth used. It may also be used in digital transmission, such as the ATSC standardized 8-VSB. The video baseband signal used in analog TV in countries that use NTSC or ATSC has a bandwidth of 6 MHz. To conserve bandwidth, SSB would be desirable, but the video signal has significant low frequency content (average brightness) and has rectangular synchronizing pulses. The engineering compromise is vestigial sideband modulation. In vestigial sideband, the full upper sideband of bandwidth W2 = 4 MHz is transmitted, but only W1 = 1.25 MHz of the lower sideband is transmitted, along with a carrier. This effectively makes the system AM at low modulation frequencies and SSB at high modulation frequencies. The absence of the lower sideband components at high frequencies must be compensated for, and this is done by the RF and IF filters. 2. Pulse Amplitude Modulation Pulse-amplitude modulation (PAM), is a form of signal modulation where the message information is encoded in the amplitude of a series of signal pulses. It is an analog pulse modulation scheme in which the amplitudes of a train of carrier pulses are varied according to the sample value of the message signal. Demodulation is performed by detecting the amplitude level of the carrier at every symbol period. There are two types of pulse amplitude modulation: 1. Single polarity PAM: In this a suitable fixed DC bias is added to the signal to ensure that all the pulses are positive. 2. Double polarity PAM: In this the pulses are both positive and negative. Pulse-amplitude modulation is widely used in modulating signal transmission of digital data, with non-baseband applications having been largely replaced by pulse-code modulation, and, more recently, by pulse-position modulation. In particular, all telephone modems faster than 300 bit/s use quadrature amplitude modulation (QAM). (QAM uses a two-dimensional constellation). The number of possible pulse amplitudes in analog PAM is theoretically infinite. Digital PAM reduces the number of pulse amplitudes to some power of two. For example, in 4-level PAM there are possible discrete pulse amplitudes; in 8-level PAM there are and in 16-level PAM there are possible discrete pulse amplitudes; possible discrete pulse amplitudes. 1 RED original signal. 2 blue lines PAM signal. 3. Pulse Width Modulation Pulse-width modulation (PWM), or pulse-duration modulation (PDM), is a technique used to encode a messageinto a pulsing signal. It is a type of modulation. Although this modulation technique can be used to encode information for transmission, its main use is to allow the control of the power supplied to electrical devices, especially to inertial loads such as motors. In addition, PWM is one of the two principal algorithms used in photovoltaic solar battery chargers,[1] the other being MPPT. The average value of voltage (and current) fed to the load is controlled by turning the switch between supply and load on and off at a fast rate. The longer the switch is on compared to the off periods, the higher the total power supplied to the load. The PWM switching frequency has to be much higher than what would affect the load (the device that uses the power), which is to say that the resultant waveform perceived by the load must be as smooth as possible. Typically switching has to be done several times a minute in an electric stove, 120 Hz in a lamp dimmer, from few kilohertz (kHz) to tens of kHz for a motor drive and well into the tens or hundreds of kHz in audio amplifiers and computer power supplies. The term duty cycle describes the proportion of 'on' time to the regular interval or 'period' of time; a low duty cycle corresponds to low power, because the power is off for most of the time. Duty cycle is expressed in percent, 100% being fully on. The main advantage of PWM is that power loss in the switching devices is very low. When a switch is off there is practically no current, and when it is on and power is being transferred to the load, there is almost no voltage drop across the switch. Power loss, being the product of voltage and current, is thus in both cases close to zero. PWM also works well with digital controls, which, because of their on/off nature, can easily set the needed duty cycle. PWM has also been used in certain communication systems where its duty cycle has been used to convey information over a communications channel. 4. Pulse Position Modulation Pulse position modulation is a signal modulation technique that allows computers to share data by measuring the time each data packet takes to reach the computer. It is often used in optical communication, such as fiber optics, in which there is little multi-pathway interference. Pulse position modulation exclusively transfers digital signals and cannot be used with analog systems. It transfers simple data and is not effective at transferring files. How Pulse Position Modulation Works Pulse position modulation works by sending electrical, electromagnetic, or optical pulses to a computer or other device in order to communicate simple data. It requires both devices to be synchronized to the same clock so that when a series of pulses is sent, the device decodes the information based on when the pulses were broadcasted. Alternately, another form of pulse position modulation known as differential pulse position modulation, allows all signals to be encoded based on the difference between broadcast times. This means that a receiving device only has to observe the difference in arrival times in order to decode a transmission. Applications Pulse position modulation has many purposes, especially in RF (Radio Frequency) communications. For example, pulse position modulation is used in remote controlled aircraft, cars, boats, and other vehicles and is responsible for conveying a transmitter’s controls to a receiver. Each pulse’s position may describe an analogue controller’s physical direction, while the number of pulses may describe the number of possible commands that the device may receive. Advantages Pulse position modulation conveys simple commands that other forms of signal modulation are either simply not made for or are too complex to use in certain situations. Because pulse position modulation only communicates simple commands from a transmitter to a receiver, it is often used in lightweight applications due to its low system requirements. Disadvantages Pulse position modulation requires that both devices are synchronized or differential pulse position modulation is used. Also, pulse position modulation is highly sensitive to multipathway interference, such as echoing, that can disrupt a transmission by altering the difference in arrival times of each signal. 5. MODEM A modem (modulator-demodulator) is a device that modulates signals to encode digital information and demodulates signals to decode the transmitted information. The goal is to produce a signal that can be transmitted easily and decoded to reproduce the original digital data. Modems can be used with any means of transmitting analog signals, from light emitting diodes to radio. A common type of modem is one that turns the digital data of a computer into modulated electrical signal for transmission over telephone lines and demodulated by another modem at the receiver side to recover the digital data. Modems are generally classified by the amount of data they can send in a given unit of time, usually expressed in bits per second (symbolbit/s, sometimes abbreviated "bps"), or bytes per second (symbol B/s). Modems can also be classified by their symbol rate, measured inbaud. The baud unit denotes symbols per second, or the number of times per second the modem sends a new signal. For example, the ITU V.21 standard used audio frequency shift keying with two possible frequencies, corresponding to two distinct symbols (or one bit per symbol), to carry 300 bits per second using 300 baud. By contrast, the original ITU V.22 standard, which could transmit and receive four distinct symbols (two bits per symbol), transmitted 1,200 bits by sending 600 symbols per second (600 baud) using phase shift keying. 6. QAM Quadrature amplitude modulation (QAM) is both an analog and a digital modulation scheme. It conveys two analog message signals, or two digital bit streams, by changing (modulating) the amplitudes of two carrier waves, using the amplitude-shift keying(ASK) digital modulation scheme or amplitude modulation (AM) analog modulation scheme. The two carrier waves, usually sinusoids, are out of phase with each other by 90° and are thus called quadrature carriers or quadrature components — hence the name of the scheme. The modulated waves are summed, and the final waveform is a combination of both phaseshift keying (PSK) and amplitude-shift keying (ASK), or (in the analog case) of phase modulation (PM) and amplitude modulation. In the digital QAM case, a finite number of at least two phases and at least two amplitudes are used. PSK modulators are often designed using the QAM principle, but are not considered as QAM since the amplitude of the modulated carrier signal is constant. QAM is used extensively as a modulation scheme for digital telecommunication systems. Arbitrarily high spectral efficiencies can be achieved with QAM by setting a suitable constellation size, limited only by the noise level and linearity of the communications channel. QAM transmitter QAM receiver 7. MATCHED FILTER In signal processing, a matched filter (originally known as a North filter[1]) is obtained by correlating a known signal, or template, with an unknown signal to detect the presence of the template in the unknown signal. This is equivalent to convolving the unknown signal with a conjugated time-reversed version of the template. The matched filter is the optimal linear filter for maximizing the signal to noise ratio (SNR) in the presence of additive stochastic noise. Matched filters are commonly used in radar, in which a known signal is sent out, and the reflected signal is examined for common elements of the out-going signal. Pulse compression is an example of matched filtering. It is so called because impulse response is matched to input pulse signals. Two-dimensional matched filters are commonly used in image processing, e.g., to improve SNR for X-ray. Matched filtering is a demodulation technique with LTI filters to maximize SNR. The following section derives the matched filter for a discrete-time system. The derivation for a continuous-time system is similar, with summations replaced with integrals. The matched filter is the linear filter, , that maximizes the output signal-to-noise ratio. Though we most often express filters as the impulse response of convolution systems, as above (see LTI system theory), it is easiest to think of the matched filter in the context of the inner product, which we will see shortly. We can derive the linear filter that maximizes output signal-to-noise ratio by invoking a geometric argument. The intuition behind the matched filter relies on correlating the received signal (a vector) with a filter (another vector) that is parallel with the signal, maximizing the inner product. This enhances the signal. When we consider the additive stochastic noise, we have the additional challenge of minimizing the output due to noise by choosing a filter that is orthogonal to the noise. Let us formally define the problem. We seek a filter, , such that we maximize the output signal- to-noise ratio, where the output is the inner product of the filter and the observed signal Our observed signal consists of the desirable signal and additive noise . : Let us define the covariance matrix of the noise, reminding ourselves that this matrix has Hermitian symmetry, a property that will become useful in the derivation: where output, denotes the conjugate transpose of , and denotes expectation. Let us call our , the inner product of our filter and the observed signal such that We now define the signal-to-noise ratio, which is our objective function, to be the ratio of the power of the output due to the desired signal to the power of the output due to the noise: We rewrite the above: We wish to maximize this quantity by choosing . Expanding the denominator of our objective function, we have Now, our becomes We will rewrite this expression with some matrix manipulation. The reason for this seemingly counterproductive measure will become evident shortly. Exploiting the Hermitian symmetry of the covariance matrix , we can write We would like to find an upper bound on this expression. To do so, we first recognize a form of the Cauchy-Schwarz inequality: which is to say that the square of the inner product of two vectors can only be as large as the product of the individual inner products of the vectors. This concept returns to the intuition behind the matched filter: this upper bound is achieved when the two vectors our derivation by expressing the upper bound on our and are parallel. We resume in light of the geometric inequality above: Our valiant matrix manipulation has now paid off. We see that the expression for our upper bound can be greatly simplified: We can achieve this upper bound if we choose, where is an arbitrary real number. To verify this, we plug into our expression for the output : Thus, our optimal matched filter is We often choose to normalize the expected value of the power of the filter output due to the noise to unity. That is, we constrain This constraint implies a valueof , for which we can solve: yielding giving us our normalized filter, If we care to write the impulse response of the filter for the convolution system, it is simply the complex conjugate time reversal of . Though we have derived the matched filter in discrete time, we can extend the concept to continuous-time systems if we replace noise, assuming a continuous signal with the continuous-time autocorrelationfunction of the , continuous noise , and a continuous filter . 8. Shannon Heartly Theorem In information theory, the Shannon–Hartley theorem tells the maximum rate at which information can be transmitted over a communications channel of a specified bandwidth in the presence of noise. It is an application of the noisy-channel coding theorem to the archetypal case of a continuous-time analog communications channel subject to Gaussian noise. The theorem establishes Shannon's channel capacity for such a communication link, a bound on the maximum amount of error-free digital data (that is, information) that can be transmitted with a specified bandwidth in the presence of the noise interference, assuming that the signal power is bounded, and that the Gaussian noise process is characterized by a known power or power spectral density. The law is named after Claude Shannon and Ralph Hartley Statement of Theorem Considering all possible multi-level and multi-phase encoding techniques, the Shannon–Hartley theorem states the channel capacity C, meaning the theoretical tightest upper bound on the information rate (excluding error correcting codes) of clean (or arbitrarily low bit error rate) data that can be sent with a given average signal power S through an analog communication channel subject to additive white Gaussian noise of power N, is: where C is the channel capacity in bits per second; B is the bandwidth of the channel in hertz (passband bandwidth in case of a modulated signal); S is the average received signal power over the bandwidth (in case of a modulated signal, often denoted C, i.e. modulated carrier), measured in watts (or volts squared); N is the average noise or interference power over the bandwidth, measured in watts (or volts squared); and S/N is the signal-to-noise ratio (SNR) or the carrier-to-noise ratio (CNR) of the communication signal to the Gaussian noise interference expressed as a linear power ratio (not as logarithmic decibels).