Supplementary Material
advertisement

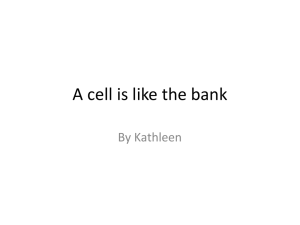
Supplementary Material 1. Derivation of Energy Release Rate of plane strain membrane for Full Friction (no-slip) and Frictionless contact We are slightly modifying the calculations done by Rong et al. [1] to get the expressions for a plane strain membrane. Most of the calculation is same and is reproduced here for completeness. Figure 1. Peeling a small segment of the membrane (shown by thick lines). (a) Contact length decreases by an amount of c .Membrane configuration before (thick solid) and after (thick dashed) peeling is shown. (b) Closer view of the contact edge during contact line receding. O2 denotes the right clamp. [1] 1.1 No-Slip Interface Assume that a contact length of , x c has been achieved during inflation of the membrane. The energy release rate can be calculated by peeling a small part of the membrane and calculating the change in potential energy per unit new surface created. A schematic of membrane peeling is shown in Figure 1a. During this process, a small portion of membrane dc is detached. The detached membrane corresponds to ( d , ) in the undeformed configuration. As we mentioned in the main text, stretch ratio is discontinuous at the contact edge during deflation. Let and denote the stretch ratio just inside and outside of the contact region at the contact edge, respectively. Using the same nomenclature T is the line tension just outside the contact edge and so on. By definition of stretch we have d dc / . (1) We call the membrane outside the original contact region, i.e., ( , a) , part 1 and the newly detached membrane part 2 (see Figure 1b). The change in potential energy is then, E U WP , (2) where U is the increase of the elastic energy of the system and WP is the work done by the pressure on the system. As there is no slip in the contact region, the membrane is “locked” in the contact region and hence, we can split the potential energy change as, E U WP U1 U2 WP1 WP 2 (3) where U1 , U2 , WP1 and WP 2 are the increase in elastic energy and work done by the pressure on part 1 and part 2, respectively. For part 1, energy balance requires that WT U1 WP1 , (4) where WT is the work done by the tension T on part 1 during contact line shrinking. A simple calculation shows that the first order term of WT is WT U1 WP1 bT • AA ' bT ( cos ˆi sin ˆj ) •((dc dc* cos )iˆ dc* sin ˆj ) WT bT cos (dc cos dc ) bT sin dc* sin (5) WT bT cos dc bT dc , where dc * is the length of membrane part 2 after being detached from the substrate and b is the length of membrane in the out of plane direction. It can be shown that, to first order, * dc dc. Substituting (6) into (5), we obtain (6) (7) WT U1 WP1 bT cos dc bT dc bT dc cos . The work done by pressure on membrane part 2 WP 2 is a second order quantity and we can neglect it in equation (3). Due to discontinuity of stretch ratio , the first order term of U2 is U2 bh0d W ( ) W ( ) , (8) where W ( ) is the elastic energy density with respect to the undeformed configuration. Recall that generally W W ( , ) but is the hoop stretch ratio and is equal to unity for plane strain case. Substitution of (7) and (8) in (3) gives us the change in potential energy: E bT dc / cos bh0d W ( ) W ( ) . (9) Finally, the energy release rate for the process is (by definition): E d G lim T cos h0 W ( ) W ( ) dc 0 bdc dc (10) h0 G T cos W Note that for plane strain membrane under no slip contact, and T are uniform outside the contact region and can be denoted as out and Tout . However because of friction the stretch inside the contact region is not uniform. 1.2 Frictionless Interface The calculations for this case are very similar to the no-slip case. The schematic of line receding is same as in Figure 1. However because of frictionless contact, the part of membrane in contact can now slide during detachment. A small portion of membrane dc is detached from the substrate which corresponds to ( d , ) in the undeformed configuration. Now the change in the contact length consists of 2 parts: dc (dc)d (dc)s , (11) where (dc)d is the decrease in contact due to the detachment of part 2 and (dc)s is the decrease due to slipping of the membrane still in contact ( [0, d ]) . By simple observation we can see that (upto first order), (dc)d ind , (dc)s ( * d )din *din , (12) dc* out d . Unlike the no-slip case, change in potential energy now consists of 3 parts: E U WP U1 U2 U3 WP1 WP 2 . (13) where U1 and U2 are the increase in elastic energy for part 1 and part 2 respectively. WP1 and WP 2 are the work done by the pressure on part 1 and part 2 respectively. The additional term U3 is due to the change in elastic energy of the membrane still in contact ( [0, d ]) . Similar to the no slip case, energy balance of part 1 (See (4)) requires, WT U1 WP1 bTout cos dc bTout dc . (14) The work done by pressure on membrane part 2 ( WP 2 ) is a second order quantity and can be neglected. Due to discontinuity of stretch ratio , the first order term of U2 is: U2 bh0d W(out ) W(in ). (15) Note that because there is no work done by pressure on the part that slips during contact line shrinking, U3 is equal to the work done by Tin only. U3 bTin ( * d )din bTin (dc)s . (16) In absence of friction, balance of horizontal forces at the contact edge relates the inner and outer tensions: Tin Tout cos and we can write U3 as: U3 bTout cos (dc)s . (17) Substituting (14), (15) and (17) into (13), we get the change in potential energy: E bTout cos dc bTout dc bh0d W (out ) W (in ) bTout cos (dc)s E bTout cos (dc (dc)s ) bTout dc* bh0d W E bTout cos (dc)d bTout dc* bh0d W . Further simplification can be affected by using (12): E (Tout cos Tout out h0 W )bd Using the definition of energy release rate along with (12) we can write: (T cosin Tout out h0 W )bd E G lim lim out (dc )d 0 b(dc) (dc )d 0 b(dc)d d h G Tout out cos 0 W in in Comparison of (10) and (19) demonstrates that the expression for energy release rate is identical for no-slip and frictionless case with and replaced by out and in . (18) (19) 2. Detailed Calculations for Pull-off Contact Length and Adherence force Complete description of the problem and definition of the terms and variables used is given in the main text [2]. Here we show the detailed calculations for studying membrane pull-off. Equations from part 1 [3] of the study will be referred as (Part 1-**) and similarly for part 2 [2] as (Part 2-**). The following non-dimensionalizations will be used in the calculations below, w c d R * W T c ,d ,R , ,W ,T , wad ad (20) a a a a h0 h0 Pull-off on a No-slip Interface Governing equations for the no-slip membrane in contact are reproduced here in normalized form for completeness. case (, (Part 2-5), (Part 2-7a,b), (Part 1-1) and (Part 2-8)) are rewritten in normalized form as: The inner stretch just inside the contact edge is given by (Part 2-A1): dc (21) * , d Stretch ratio in the outer portion of the membrane is uniform and can be expressed using geometry (Part 2-5) as: R ( m 0 ) , (22) 1 Membrane geometry gives us two more relations (Part 2-7a,b): R (sinm sin0 ) 1 c , (23) R (cos 0 cos m ) d , (24) Force equilibrium of a small portion of the membrane in the outer region shows that tension is uniform and related to radius of curvature and pressure (Part 1-1): T R , (25) In addition to above, we also have the balance of energy at the contact edge (8): 1 (26) T ( cos0 ) W W wad . Finally, the neo-Hookean constitutive law ((Part 1-5) and (Part 1-4)) relates the tension and strain energy density with stretch: T T ( ) 3 , (27) W W ( ) 2 2 2 / 2. Assuming that the adhesion is high enough to cause the membrane to “pull-off” at a finite contact, pressure and contact length at pull-off can be calculated as a function of d and wad . Differentiating (22) - (26) with respect to c we get: * d dR ( m 0 ) R d m d 0 R ( m 0 ) d , dc dc 1 1 dc dc 1 2 dc (28) 1 d d dR (sin m sin 0 ) R cos m m cos 0 0 1, (29) dc dc dc d d dR (cos m cos 0 ) R sin 0 0 sin m m 0, (30) dc dc dc dT d dR d (31) R , d dc dc dc d 0 dT d d 1 d cos T sin 0 0 dc 2 dc d dc dc (32) dW d 1 d 1 dW d W W 0. 2 d c d dc d d c We can reduce these equations to a simpler form by enforcing the conditions for pull-off. At pull-off, pressure is at its minimum: d 0. (33) dc Also, in numerical simulations, outer stretch is observed to be at its minimum at pull-off: d (34) 0. dc Substituting (33) and (34) in (31), we get : dR (35) 0. dc Numerical simulations show also that the pull-off point always corresponds to the clamp slope going to zero (membrane locally flat at the clamped end): m 0. (36) It should be noted that we observe that (36) holds true for frictionless pull-off as well. Substituting (36) and (35) in (30) we get: d 0 0. (37) dc Substitution of (34), (35) and (37) simplifies (28) to give: * 0 0 R d m R ( m 0 ) d d m . 2 1 dc 1 dc dc 1 (38) 1 Using (35) and (37) we can simplify (29) to get: d R m 1, dc (39) Combining (38) and (39) we get an expression for inner stretch at the contact edge, R0 (40) . 1 Using (22) and (36) we can evaluate the outer stretch at pull-off: R 0 0 1 R0 1 (41) (42) This analytical condition is also corroborated in our simulations where the pull-off point coincides with the intersection of the curves for and . Note that (30), (31) and (32) are automatically satisfied at the pull off point for (33)-(37). Substituting (42) in the contact condition we get the simplified criterion for membrane pull-off: T (1 cos0 ) wad , (43) where T T T . Equation (43) implies that the tension is continuous across the contact edge at pull-off. 2.1 Transition from pinch-off to pull-off Let us consider the case when we can fix the separation d between the unstressed membrane and the substrate and vary the adhesion between them to obtain the critical adhesion wt which identifies the point of transition from pinch-off to pull-off. This is the minimum value of adhesion after which the membrane detaches unstably via pull-off. Consider first the case of no-slip contact. At the critical value of adhesion, the membrane has zero contact, hence c * 0 . However, by definition of critical adhesion, this detachment also corresponds to a pull-off with zero contact length, thereby requiring (33) - (42) to be satisfied as well. Substituting these conditions and the constitutive law (27) in the governing equations (22) - (26), we can simplify them as: R 0 , (44) 1 R (45) sin 0 R (cos 0 1) d 1 R 3 (46) (47) 1 (1 cos0 ) wad (48) 3 Note that . Combining(44), (45) and (46), the outer stretch and contact edge slope at detachment are given by, 2 tan d 0t , sin 0t sin 2tan1 d 1 t where 0t 2 tan1 d . (49) (50) The subscript ‘t’ denotes that quantities are calculated at the critical adhesion wt . Note that (36) holds true irrespective of friction therefore, equations (49) and (50) are valid for both noslip and frictionless contact (with replaced by out ) as they depend on geometry only. Substituting (49) in (43) ,the critical adhesion value at which the membrane detachment mode transitions from pinch-off to pull-off is found to be 3 0t 2 0t 0t sin , wt 2 (51) sin(0t ) sin(0t ) 2 where 0t is given by (50). For a frictionless interface, we do not have equality of stretches (42) at pull-off. Instead in at pull-off is calculated using the expression for outer stretch (49) along with the force balance ( ) ( ) ( ) condition at the contact edge (Part 2-6). We can then substitute out t , in t and 0 t in the energy balance condition (Part 2-8) to obtain the critical adhesion wt . 3. Bibliography 1. Long R., Shull K.R., Hui C.-Y. 2010 Large deformation adhesive contact mechanics of circular membranes with a flat rigid substrate. Journal of the Mechanics and Physics of Solids 58, 1225-1242. (doi:10.1016/j.jmps.2010.06.007). 2. Srivastava A., Hui C.-Y. 2013 Large Deformation Contact Mechanics of Long Rectangular Membranes – part 2: Adhesive Contact. 3. Srivastava A., Hui C.-Y. 2013 Large Deformation Contact Mechanics of Long Rectangular Membranes – part 1: Adhesionless Contact.