DOCX

d
Problem 1 (10 pts): Prove that dt
ω
Solution:
MAE 208: Homework 5
Due: Wednesday 11/4/2009
d
ω dt t
r t
d r dt t
.
The left hand side is: d dt d dt
ω
ω
d dt
1 r
1
2
3 r
2
d dt
r
2 3
r
2 3
r
3 2
r
3 2
3 1 r r
1 2
3 1 r r
1 2
r
1 3 r
2 1
r
1 3 r
2 1
r
2 3
r
3 1
r
3 2 r
1 3
r
1 2
r
2 1
The right hand side: d
ω dt t d r dt t d
ω dt t d r dt t d
ω dt t d r dt t
1
r r
1
1 r
1
2
r
2
3 3
r
2 3
r
3 1 r
1 2
r
3 2 r
1 3 r
2 1
r
2 3
r
3 2
r
3 1
r
1 3
r
1 2
r
2 1
Inspection of the two shows that they are the same.
1 | P a g e H o m e w o r k 5
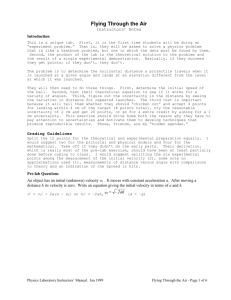
Problem 2 (30 pts): The rolling airframe missile (RAM) is a quick-reaction self defense system for the
U.S. Navy. The system is designed to protect against incoming anti-ship cruise missiles. The system
consists of a platform that can rotate and control the elevation angle, Figure 1 (a).
(a) (b)
Figure 1. Rolling Airframe Missile (RAM): photograph [Wikipedia] (a); schematic (b)
Suppose that a given instant a missile is fired from rest with a magnitude of acceleration of a m
with respect to the missile launcher and in a direction normal to the face of the launcher. At the same time, the base is rotating with an angular velocity and acceleration of
1
and
1
, respectively, and the launcher is rotating with angular velocity and acceleration
2
of and
2
. The base has a radius of r
1
.
The supports have a height of h
1
and a thickness of l
1
. The distances to the missile from the pivot point
of the missile launcher are shown in Figure 1(b) –
x
2
, y
2
, and z
2
. Determine the acceleration of the missile being fired at this instant with respect to the fixed coordinate system ( x , y , and z ). (Hint:
Clearly set up and keep track of your coordinate systems, work with vectors, and make use of Maple to determine the cross products).
Solution:
Let’s consider two coordinate systems – one is the original coordinate system ( xyz ) and the other coordinate system is attached to the missile launcher ( ' ' ' ).
2 | P a g e H o m e w o r k 5
Figure 2. Coordinate systems for RAM
The “prime” coordinate system can be transformed from the original coordinate system using a rotation about the x and a rotation about z . Any vector Q in the ' ' '
coordinate system can be transformed to xyz coordinate system using:
xyz
R u
R z
2
1
where
R z
2
1
cos
sin
0
2
2
1
1
sin
2
1
cos
2
1
0
0
0
1
sin cos
cos sin
0 0
0
0
1
and R u is a rotation about x ' (For http://en.wikipedia.org/wiki/Rotation_matrix or Chapter 20 notes): more information see
3 | P a g e H o m e w o r k 5
R u
sin
1
2
cos
1
1 cos
2 sin
cos 2 sin
cos
cos
2 cos 2
sin
1 sin
cos
1 sin
sin
1 sin cos
First consider the acceleration of the missile with respect to the point where the support connects to the missile launcher (Point B). In the prime coordinate system, we get:
a m/ B
a a m/ B m/ B
α
2
r
B/ 2
ω
2
ω
2
r
B/ 2
a
0 m
0
0
x y z
2
2
2
0
0
2
0
0
y x
2 z
2
2
a m
x
2 2
0 z
2 2
2 z
2 2
2 x
2 2
Now find the acceleration of point B fixed Cartesian coordinate system: xyz
α
1
B
ω
1
ω
1
r
B
xyz xyz
r
1 r
1
l
1 l
1
h
1
0
0
0
1
1
r r
1
1
l l
1
1
0
1
1
2
2
r
1
l
1 r
1
l
1
c os
r
1 r
1
l
1 l
1
h
1
Finally, we have: a m
a
B
a m/B
But two add these two vectors we need to be in the same coordinate system:
xyz
xyz
a m/ B
xyz where:
4 | P a g e H o m e w o r k 5
a m/ B
xyz
a m/ B
xyz
R u
cos sin
R
sin z
2
cos cos
a m
1
a m/ B
m
m z
2 2
z
2 2 z
2 2
2 x
2 2
2 x
2 2
sin
x
2 2
2 z
2 2
2 x
2 2
sin
cos
x
2 2
x
2 2
2 z
2 2
2 z
2 2
Finally:
xyz
1
1
r r
1
1
l l
1
1
1
1
2
2
r
1
l
1 r
1
l
1 sin
a m
cos sin z
2 2
cos cos
2 x
2 2
cos
a m
a m
z
2 2 z
2 2 x
2 2
2 x
2 2
2 x
2 2
2 z
2 2
sin
sin
x
2 2 x
2 2
2 z
2 2
2 z
2 2
Problem 15-102:
Using conservation of angular momentum, we have:
H
1
H
2 r mv
1
r mv
2
5 /
10 / ft v
2
We can find the work done by the rope by using the Principle of Work and Energy. Note that the final velocity of the block has to include the tangential and radial velocity: v
2 v r
2 v t
2
4
2
10
2
116 ft
2
/ s
2
Therefore the work is:
1
2 mv 2 W
1
1
8
W
1
2 mv
2
2
2
W
11.3
ft
lb
5 | P a g e H o m e w o r k 5
Problem 16-29:
The angular velocity of shaft S at 2 seconds is:
d
4
3 dt
d
dt
0
2 dt
1
f
1 d
4
2
1
16
f
f
4
1
16
2.397
/
We can relate the angular velocity of shaft S to shaft E using:
r
S A
r
BC C
r
BC B
r
DE D
S r
A r
C r
B
DE
S r
A r
C r r
D
20 30
2.397
80 120
.1498
/
Problem 16-47:
The total length of the rope between B and D can be found using the law of cosines: s 2
BD s
BD
10 2
10 2
200 cos
Therefore the total length of the rope is: l
s
A
s
BD
s
A
Take a time derivative gives us velocity:
6 | P a g e H o m e w o r k 5
d
d l dt dt s
A
0
v
A
1
2
d dt
v
A
sin
1/ 2 sin
Taking one more time derivative gives acceleration: a
A
d
dt
a
A
a
A
sin
sin
2 sin
2
3/ 2
cos
sin
2 cos
sin
2
3/ 2
Problem 16-74:
Since shaft S is not rotating, the velocity where planet pinion A contacts S is 0. However, the velocity of the center of A can be found using CD: v
A
r
CD CD
m
1 /
Therefore the angular velocity of A is:
r
A A
v
A
A
1 /
.05
m
20 /
The velocity of the point where A contacts the ring is: v
R
2 r
A A
20 rad s
m
2 /
Finally the angular velocity of the ring is:
R
v
R
r
R
2 /
.175
m
11.43
/
Problem 16-90:
7 | P a g e H o m e w o r k 5
Since B is not slipping the velocity at A will be: v
A
r
r
2
r
1
Problem 16-143:
If we pin the fixed and rotating coordinates to rod AB, we have the following coordinate system.
Figure 3. Coordinate system for problem 16-143
The velocity of collar C using rod CD is: v v
ω r
C CD C/ D v
C
CD k
2
CD
C
i
j
2
CD
i j
In the rotating reference frame, the velocity of collar C is: v
Ω r
C AB
C/ A v
C xyz
5 k
xyz i v
C
10 j
xyz i
Relating components yields:
2
CD cos 60
2
CD
CD
10 / xyz
17.32
/ xyz
The acceleration of collar C using rod CD is:
8 | P a g e H o m e w o r k 5
a a
C
α
CD
r
C/ D
a
C
CD k
C
2
CD r
C/ D
i
2
CD
j
j
10
2
i
2
CD
i j
In the rotating reference frame, the acceleration of collar C is: a
C
a
C
C/ A
Ω Ω r
C/ A
2
Ω xyz
xyz
12 k
5
2
5 k
17.32
i a
C
24 j
50 i
173.2
j
xyz i xyz i
Relating components gives:
2
CD
200 sin 60 xyz
CD
2
CD
200 cos 60 o
xyz
24 /
8.43
/
9 | P a g e H o m e w o r k 5