hedule Analysis and Optimization for Dinky Service
advertisement

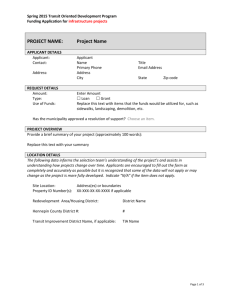
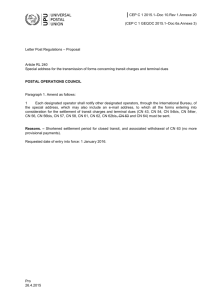
University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 Feasibility of Enhancing the Safety, Environmental Benefits, and Cost-Effectiveness of New York State’s Public Transit Services through Adoption of Autonomous Collision Avoidance and Autonomous Emergency Braking Systems for Buses PROPOSAL SUBMITTED TO THE NEW YORK STATE ENERGY RESEARCH AND DEVELOPMENT AUTHORITY IN RESPONSE TO NYSERDA PON No. 3090 Integrated Mobility Solutions for Smarter Cities and Communities Focus Area 4: Sustainable Transportation Alternatives Funding Category 2: Research, Policy, and Feasibility Studies Autonomous Emergency Braking Systems on a Bus July 3, 2015 Submitted by: University Transportation Research Center (UTRC) with Princeton Autonomous Vehicle Engineering (PAVE), Princeton University Camille Kamga, Ph.D., (Co-PI), Director of UTRC and Assistant Professor of Civil Engineering, The City College of New York Alain L. Kornhauser, Ph.D., F.ITE (Co-PI), Professor, Operations Research & Financial Engineering; Director, Transportation Program; Faculty Chair, Princeton Autonomous Vehicle Engineering, Princeton University Jerome Lutin. Ph.D., PE, F.ITE, NJ TRANSIT (retired) 1 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 Executive Summary Proposed Category: This proposal addresses Focus Area 4: Sustainable Transportation Alternatives and is being submitted under Funding Category 2: Research, Policy, and Feasibility Studies. Team Members: A research team at the University Transportation Research Center (UTRC) and the Princeton Autonomous Vehicle Engineering (PAVE) at Princeton University in collaboration with Dr. Jerome Lutin, formerly with NJ Transit, will conduct this project. The Principal Investigator (PI) is Dr. Camille Kamga, Director of the University Transportation Research Center. Dr. Alain L. Kornhauser will serve as Co-PI and is the Chair of Princeton Autonomous Vehicle Engineering at Princeton University. Dr. Jerome Lutin will be Chief Research Engineer.. Graduate and undergraduate students pursuing degrees in Transportation Engineering and Operations Research & Financial Engineering will aid the research team. Data and analytical support will also be contributed, in kind, by members of the insurance industry, including Munich Re, the world’s largest reinsurance company and the Washington State Transportation Insurance Pool (WISTIP), a major insurer of small and medium sized public transit companies. Background: Public transportation is very important in New York State. New York State transit operators carry one-third of the nation’s transit riders per year and one-quarter of all transit services in the nation are provided in New York State1. Bus transportation is generally both efficient and safe. However, opportunities exist to make it even more efficient and safer. In 2013, New York State’s transit buses were involved in 472 collisions that injured 1,914 individuals and resulted in 15 fatalities. New York transit operators reported spending more than $136 million that year on casualty and liability expenses for buses and paratransit. That amount is equivalent to the cost of nearly 800,000 hours of transit service. Imagine the benefits that could be achieved if a portion of the money paid out in claims and insurance premiums could be returned to better uses. Objective and scope of Proposed Project: The goal of this feasibility study is to explore the opportunities and challenges resulting from the adoption of autonomous collision avoidance and autonomous emergency braking systems for buses in New York State in order to improve safety and reduce the casualty and liability expenses of bus transit properties. The solution proposed is the adoption of autonomous collision avoidance and autonomous emergency braking systems for transit buses. The objective is to quantify the potential savings resulting from insurance claims, casualty, and liability expenses incurred by New York State public transportation providers, to determine the types of collisions that are responsible for the greatest share of injuries, fatalities and claims, and recommend collision avoidance technology that could be adapted for use on 1 The Public Transportation Safety Board (PTSB) 2010 Annual Report; https://www.dot.ny.gov/divisions/operating/osss/ptsb 2 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 buses. Quantified will be the environmental benefits achieved by investing the savings expanded and improved bus services. This project will include: 1) A review and analysis of insurance claims, casualty and liability expenses incurred by New York State public transportation providers to determine the types of collisions that are responsible for the greatest share of injuries, fatalities and claims. 2) A review of available collision avoidance technology that could be adapted for use on buses, 3) Development of functional requirements and standards needed to insure that collision avoidance systems and autonomous emergency braking will meet the specific needs of the bus industry, 4) Convening a summit meeting for New York public transit agencies on the subject of autonomous collision avoidance systems and autonomous emergency braking for buses, 5) Preparation of a report and additional presentation materials that can be used by transit agencies seeking to procure collision avoidance and autonomous emergency braking systems for buses and 6) Identifying the improved bus transit services that could be funded with the savings and quantifying the environmental and energy advantages of those services. Project Benefits: A 2007 report by the American Public Transportation Association titled “Public Transportation: Benefits for the 21st Century”2 documents the benefits offered by public transportation. In this report, benefits of public transportation range from sustaining a strong economy, reducing energy consumption, protecting the environment, improving air quality and health, providing relief to congestion, providing critical support during emergencies and disasters, to providing mobility to urban and rural communities. These benefits can be achieved only with the assumption that transit systems are safe. Therefore, one cannot deny the importance of making our transit buses safer. The adoption of autonomous collision avoidance and autonomous emergency braking systems will not only make our transit buses safer, but, it will also reduce the claims and insurance premiums paid by transit agencies, thereby provide additional financial resources to transit agencies. Cost savings resulting from lower bus collision rates can then be invested in other aspects of transit operations and maintenance. Over the three year period 2011 to 2013, the New York State transit industry reported paying $403 million in bus and casualty and liability expenses. Because that reporting does not include many other costs of collisions, the actual cost may be significantly higher. For 2013 alone, the average cost per vehicle for reported casualty and liability expenses for the 10,420 buses and paratransit vehicles operated by New York State transit agencies amounted to $13,053.70 per vehicle. Work by Lutin and Kornhauser, 3 showed that autonomous collision avoidance systems had the potential to recover their installation costs in as little as one year in terms of claims reduction. It 2 Public Transportation: Benefits for the 21st Century (2007) American Public Transportation Association http://www.apta.com/resources/reportsandpublications/Documents/twenty_first_century.pdf 3 J. M. Lutin and A. L. Kornhauser, “Application of Autonomous Driving Technology to Transit - Functional Capabilities for Safety and Capacity,” Paper Number 14-0207, 93rd Annual Meeting of the Transportation Research Board, January 15, 2014, Washington, D.C. 3 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 is clear that the potential savings to the State of New York could total in the $100’s of millions as well as reducing thousands of injuries and hundreds of fatalities. Background and Proposed Approach The Problem Public transit providers in New York State operate more than 10,000 buses and paratransit vehicles throughout the State, serving nearly 1.1 billion trips annually. Bus service represents a vital force connecting people with jobs, schools, health care, shopping and recreation. It is integral to the economy and quality of life of the State. Public transit bus service reduces the number of autos and congestion on the State’s streets and highways, conserves energy, and reduces air pollution. Although bus transit is one of the safest ways to travel, nationwide, in 2013 alone, bus transit properties reported 4,075 collisions, 15,351 injuries, 119 fatalities, and $499,131,751 in casualty and liability expenses. Over the ten-year period from 2004 through 2013, the bus transit industry reported 1,006 fatalities, 153,285 injuries and a total of $4.81 billion in casualty and liability expenses, which, as shown in the figure below, are trending higher. The Washington State Transit Insurance Pool (WSTIP) collected data on the types of incidents that produced bus insurance claims greater than $100,000 for Washington State and for transit insurance pools in California and Ohio. They found that 74% of the losses were collisionrelated, 46% involved hitting pedestrians, bicycles, and motorcycles, 15% were forward collisions with vehicles, 10% were what they termed “non-preventable,” such as side collision, driver blackout, and 3% were classified as “other.” The National Transit Database (NTD), established by Congress to be the Nation’s primary source for information and statistics on the transit systems of the United States, contains crucial 4 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 statistics including safety data that reveal important trends about the transit industry. Transit incidents reported in the Major Incident Reporting form can be placed into one of several categories: (a) collision, (b) security incident, (c) derailment, (d) evacuation, (e) fire, (f) vehicle leaving roadway, and (g) fatality/injury not otherwise classified. Yang (2007)4 analyzed the reporting records and found that of the major bus collisions recorded in the NTD, frontal collisions occurred most frequently, followed by back, angle, and sideswipes. He also found that the major bus collisions that occurred in 2003 generated 11 more fatalities compared to 2002, an overall increase of 14 percent. For the past years, modern car safety systems, like forward collision detection have been developed and deployed on passenger vehicles. This technology can help spot danger and warn the driver. Autonomous emergency braking (AEB) goes one step further and can automatically apply the brakes. The technology can potentially help lessen the impact of a crash, or in some circumstances even prevent a collision from happening. The National Transportation Safety Board (NTSB) has called for immediate action to require these systems on new vehicles. The NTSB reported that forward collisions were reduced by 71 percent for trucks equipped with collision avoidance systems (CAS) that included autonomous emergency braking (AEB) and electronic stability control (ESC). That test spanned 30 months and included 12,600 truck-tractors. A Potential Solution Given the recent advances in automotive collision avoidance systems, their moderate costs, and the increasing trend in bus casualty and liability claims, the time is ripe to revisit the application of collision avoidance technology to transit buses. Because buses typically can stay in service for 12 to 18 years and often carry standees, their technology requirements will differ from those for trucks and autos, and there has been little progress and no financial incentive for bus manufacturers to initiate development of these systems. Consequently, innovation in this area must come from within the bus transit industry. In 2004 and 2007, the Federal Transit Administration released research reports on the potential for technology to reduce bus crashes. These reports concluded that the systems envisioned at the time, which would warn bus drivers of impending collisions, could be effective in reducing 4 Yang, C. Y. (2007) Trends in Transit Bus Accidents and Promising Collision Countermeasures; Journal of Public Transportation, Vol. 10, No. 3. 5 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 costs. Although driver warnings can be effective, in the two-to-three seconds it takes to respond to an imminent collision, a bus can travel as much as six times its own length before the brakes are applied. Autonomous emergency braking (AEB) could reduce that delay to thousandths of a second. Due to rapid advances in automated driving technology, automobiles are now entering the market with automated systems that not only sense that a collision is imminent, but actually take control of throttle, steering and braking functions to avoid or mitigate collisions. In particular, systems for autos are available that will initiate autonomous braking to bring a vehicle to a stop prior to collision with a pedestrian or vehicle, even if the vehicle operator does not apply the brakes manually. In 2012 the Insurance Institute for Highway Safety (IIHS) found that drivers of Volvo XC60 SUVs equipped with the City Safety system (Volvo’s AEB system) filed 51 per cent fewer claims for injury, 22 per cent fewer collision claims and 27 per cent fewer property damage claims than drivers of other SUVs. Studies by various insurers show that the incidence of rearend collisions are reduced by around 30 per cent for cars fitted with lidar-based AEB systems. Both the IIHS and the Europe New Car Assessment Program (EuroNCAP) have started testing AEB systems fitted to various production vehicles. While all AEB systems help to at least minimize the speed at the time of impact, some systems work better than others.5 The Highway Loss Data Institute has concluded that forward collision avoidance technologies have reduced claims. Collision Avoidance Systems for cars typically are bundled into optional packages that may include: 5 Adaptive cruise control Adaptive headlights Autonomous emergency braking Blind spot detection Cross traffic alert/avoidance Driver fatigue/inattention alert Forward collision avoidance Lane departure warning Lane keeping assist Parking assist Pedestrian detection/avoidance Rear collision warning/mitigation Self-parking Side impact detection http://www.caradvice.com.au/293366/autonomous-emergency-braking-explained/ 6 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 Optional packages vary in price, but most available multi-function packages cost less than a few thousand dollars. Purchasing buses for a transit authority is not a simple task. Buses are usually purchased under a competitive procurement process in which an agency issues a request for proposals to bus manufacturers that specifies what the agency wishes to buy. Bus manufacturers then submit proposals that contain technical information on the buses they propose to supply along with the prices for the buses and optional features. The agencies will evaluate each proposal and generally will award a contract to the manufacturer that meets the agency’s technical requirements and offers the lowest price. Integral to the process is the need for the agency to develop a detailed specification for the features it wants on the buses. Specifications range from the color scheme, to the type of engine and fuel, to small details like the location of drain plugs. The American Public Transportation Association (APTA) has developed guidelines for bus procurement that includes an outline that agencies can use in their requests for proposals. The outline runs 284 pages long and includes more than 300 alternatives for technical requirements from which an agency can choose. The APTA guidelines contain extensive technical detail, but they do not include information on, or specifications for, collision avoidance systems and autonomous emergency braking. This project can provide a basis for development of specifications that will allow transit agencies buying new buses to specify this life-saving technology. We propose to conduct a research assessment of why casualty and liability claims are increasing and determine the potential for automated collision avoidance systems to reduce fatalities, injuries and claims in transit buses and to initiate the development of functional requirements and standards to allow installation of collision avoidance and driver assist technology on new transit buses and retrofit of existing buses. Generating cost savings from insurance claims would provide funds that can be reinvested into the services, reduce delays, make bus services more reliable and increase customer satisfaction, thereby reducing use of private automobiles, reducing fuel consumption and congestion. Statement of Work and Schedule Research Approach The research approach will include literature review on collision and injuries, review and analysis of insurance claims, data collection of inventory of transit buses used by transit properties in New York State, review of available collision avoidance technology, development of functional requirements and standards needed to insure that collision avoidance systems and autonomous emergency braking will meet the specific needs of the bus industry, convene a 7 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 workshop for New York public transit agencies on the topics, and develop a document as a roadmap for deployment of these technologies. The research will be divided into the following tasks. Research Tasks Task 1: Project Manaegment Subtask 1.1 Subcontracts. The Contractor shall enter into the following agreements with Princeton Autonomous Vehicle Engineering (PAVE). A sub-agreement will be issued by the Research of Foundation of CUNY to PAVE for their involvement in the project. Subtask 1.2 Meetings: The Contractor shall hold a Kick-Off Meeting; Interim Review Meetings to review progress to date, discuss difficulties encountered and proposed solutions for overcoming them, and to outline then-current plans for completing the scope of work; and a Wrap-Up Meeting at the end of the project. Subtask 1.3 Progress Reports: The Contractor shall provide NYSERDA and NYSDOT written progress reports each quarter. These reports shall describe any difficulties encountered and the cost of the work performed during the reporting period. Subtask 1.4 Data Collection and Benefit Reporting: The Contractor shall provide NYSERDA two brief annual updates on the effectiveness of the information dissemination (e.g. conference presentations, workshops, publications, citations, etc.). Subtask 1.5 Final Report: The Contractor shall provide a final report detailing all project findings. The Contractor shall make this report available via its Web site and may take other steps (e.g., briefings for relevant agencies, elected officials, and the media) to make these findings more generally available. Task 2: Analysis of Collisions and Claims This task will include an in-depth analysis of bus collisions and the resulting claims that were generated due to fatalities, injuries, and property damage. The goal is to determine those types of collisions that result in the most severe injuries and claims and quantify the parameters of those collisions, such as velocity, angle, etc. and use this information as the basis for development of functional requirements and standards for autonomous bus collision avoidance systems. Subtask 2.1: Literature Review. The literature review will include assembling not only relevant scholarly publications on collisions and injuries, but will include information on actuarial analysis methodology for casualty and liability claims to establish risk factors 8 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 and also will include data sources for collisions and highway-related injuries and fatalities. Subtask 2.2: Risk Management Technical Working Group. This subtask will establish an expert technical working group of transit safety and risk management specialists and insurance industry actuarial specialists who will serve as a review and oversight panel for the project team. The research team anticipates to invite members of the NYSDOT’s Public Transportation Safety Board (PTSB) to participate in this advisory committee. The PTSB was created in 1984 and is statutorily responsible for the safety oversight of all public transportation systems operating in New York State that receive State Transit Operating Assistance (STOA). Its mission is to reduce the number, rate and severity of public transportation accidents. In addition, the research team will engage the New York Public Transit Association (NYPTA) and APTA in the advisory committee. Subtask 2.3: Data Collection Template and Sampling. This subtask will develop the protocols for data collection, sample size determination, and statistical validation. Subtask 2.4: Data Collection. Data will be collected from transit agencies and the Federal Transit Administration (FTA) National Transit Database (NTD). Data collection will include tracking specific collisions through time until claims resolution. Data also will be collected to track transit agency costs attributed to a specific collision that may not have been included in the claims. Subtask 2.5: Collision and Claims Data Analysis and Report Preparation. This task will include analysis of the data, preparation of technical memoranda to document each of the above subtasks, and a draft report that documents the analysis and findings. The draft report will be submitted for review and comment to the Risk Management Technical Working Group established in Subtask 2.2 above. The methodology will be documented in sufficient detail to enable other researchers to duplicate the results of this study. Task 2: Deliverable: The Contractor will prepare a literature review report and a technical memorandum documenting the data analysis performed. The report will include all the review findings. Task 3: Development of Functional Requirements and Certification Procedures This task will perform the research necessary to develop functional requirements and standards to allow the public sector transit operators to specify and procure autonomous bus collision avoidance systems for new buses and for retrofits. This will provide the needed guidance that will allow private sector bus manufacturers and systems developers to create innovative lifesaving technologies. 9 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 Subtask 3.1: Standards Technical Working Group. This task will establish an expert technical working group of transit operations and maintenance personnel and vehicle engineering and procurement staff with experience in transit bus procurement and maintenance. Subtask 3.2: Literature Review. In addition to the standard literature review, this task will also review existing standards developed for autonomous collision avoidance systems for autos, trucks and other vehicles by both domestic and international standards bodies including but not limited to the Institute of Electrical and Electronics Engineers (IEEE), International Organization for Standardization (ISO), and the Society of Automotive Engineers (SAE International). Subtask 3.3: Functional Requirements. This task will include development of draft functional requirements that will include sections on the following areas: Human factors – bus operator/autonomous system interactions and allowable forces on bus passengers Sensor capabilities – detection sensitivity, range and coverage – pedestrians, bicycles, vehicles, stationary objects, under various lighting and environmental conditions Sensor and system location, networking, and power requirements, maintenance, reliability, component interoperability, and latency of response Bus braking system performance parameters and tolerances, and actuation interface characteristics and requirements Subtask 3.4: Certification Procedures and Cost Estimating. Based on the functional requirements developed in Subtask 3.3 this task will develop a set of procedures that would be used to test and certify autonomous bus collision avoidance systems for use by transit agencies. This subtask also will develop estimates of the time and cost to implement the testing and certification process. Subtask 3.5: Functional Analysis and Draft Report Preparation. This task will include analysis of the data, preparation of technical memoranda to document the literature review and the functional requirements developed in subtasks above, and a draft report that documents the analysis and findings. The draft report will include recommendations to guide transit agencies in procuring autonomous bus collision avoidance systems. The draft report will be submitted for review and comment to the Standards Technical Working Group established in Subtask 3.1 above. Task 3: Deliverable: The Contractor expects to provide a technical memorandum to document the functional requirements and recommendations. 10 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 Task 4: Identifying the improved bus transit and quantifying their environmental and energy advantages. Not only does improved safety provide fundamental value to society through the reduction of injuries and deaths, but in the case of crash avoidance, it also saves a substantial amount of money that is spent to fix what the crash broke. Eliminating the crash, saves the money. Those monies can then be used to “low hanging fruit” opportunities to improve transit services. In this way society gains again through mobility that improves quality-of-life and the enviroment and energy through mode shift from auto trips to transit trips. Subtask 4.1: Identify “low hanging fruit” bus transit opportunities. This task will search the literature for the existing best opportunities to improve transit services that have identified both the cost of those services and their environmental and energy impacts Subtask 4.2: Create a transit investment plan for the use of the liability savings This task will use the findings of Task 4.1 and the expected liability savings from the deployment of automated collision avoidance systems to develop a transit improvement plan that would use those savings to provide the greatest environmental and energy improvement for the State of New York. Task 5: Summit Meeting for New York Public Transit Association on Autonomous Bus Collision Avoidance Systems. As stated in the background section, New York State transit bus collisions in 2013 injured 1,900 people and resulted in 15 fatalities. Over the three year period 2011 to 2013, the New York State transit industry reported paying $403 million in bus and casualty and liability expenses. Because that reporting does not include many other costs of collisions, the actual cost may be significantly higher. The cost in lives and scarce funds of bus collisions of this magnitude warrants serious attention from the transit industry. For this reason, at the conclusion of Tasks 3 and 4, we propose to host a summit meeting of New York State transit technical staff and executives to present our findings and create an action plan for the future. Subtask 5.1: Meeting Logistics. This subtask includes developing the program and materials, determining the date and location, identifying the participants and other activities necessary for a successful workshop. Subtask 5.2: Draft Proceedings and Recommendations. This subtask includes preparation of transcripts and video recording of the meeting and preparation of the proceedings. Task 5 Deliverable: The Contractor will a memorandum to document the proceedings of the workshop. 11 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 Task 6: Final Report and Webinar This task includes preparation of the final report, which includes the technical memoranda revised in response to comments by each of the two expert technical working groups, the conference proceedings, and a one-hour recorded webinar and Power Point presentation summarizing the project. Subtask 6.1: Final Report. The final report will document all the activities, analysis, findings, and recommendations of the project. Subtask 6.2: Power Point presentation and Webinar. The research team believes that a power point presentation and webinar will provide efficient tools for outreach and dissemination of the findings of the research to transit agencies and will help for a faster understanding and potential adoption of these technologies. Research Deliverables The Contractor will provide written reports throughout the research. The reports will be synchronized with the research task schedule. The written deliverables are outlined at the end of each task above, including: quarterly reports indicating research progress literature review technical memorandum of functional requirements and recommendations proceedings of the workshop with transit agencies final report documenting all the activities and findings of the project a power point presentation and webinar summarizing the project Proposal Schedule [ ALAIN TO WRITE THIS] The following schedule details the timeline for completing this 18-month project. The timeline does not identify a starting date. Proposer Qualifications Dr. Camille Kamga Co-Principal Investigator (Co-PI) Dr. Camille Kamga, will serve as the Principal Investigator of the proposed project. He is currently the director of the federally supported University Transportation Research Center 12 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 (UTRC) and an Assistant Professor of Civil Engineering at the City College of New York (CCNY). A consortium of 19 major U.S. academic institutions, UTRC asserts a significant role in the region and nationally, conducting research and projects on surface transportation, carrying out training and educational programs and actively disseminating the results of its work. It is one of the few such centers in the U.S. with a concentration in public transportation operations, policy and management. Dr. Kamga oversees the Center activities and works closely with federal, regional and state transportation planning and policy organizations. He also serves as member of the Board of Directors of the Intelligent Transportation Society of NY - a professional group providing education and outreach to foster the understanding of ITS applications and technologies. He holds a Ph.D. in Civil Engineering from the Graduate Center of the City University of New York, specializing in Intelligent Transportation Systems (ITS). He is the 2006 recipient of the National Pikarsky Award for Outstanding Dissertation in Science and Technology from the Council of University Transportation Center. His doctoral thesis was on the topic of “Estimation of Network Based Incident Delay in a Transportation Network Using Dynamic Traffic Assignment.” In addition to his research and administrative duties, Dr. Kamga has participated and is currently participating in numerous transportation-related projects at UTRC. Dr. Kamga’s research interests are in the modeling and of transportation network, analysis of very large transportation networks, and application of technology for transportation. Dr. Kamga is currently the principal investigator of many research projects sponsored by the New York State Department of Transportation, New York Metropolitan Transportation Council, New York State Energy and Research Development Authority, New Jersey Department of Transportation, and New York City Transit. Dr. Alain Kornhauser Co-Principal Investigator (Co-PI)Alain L. Kornhauser serves as Professor of Operations Research and Financial Engineering at Princeton University where he has taught and conducted research since 1972. He serves as Director of the Princeton Transportation Program and Faculty Chair of Princeton Autonomous Vehicle Engineering (PAVE). Dr. Kornhauser is internationally known for his pioneering research in autonomous transit systems and large scale transportation network analysis. In 1979 Dr. Kornhauser founded ALK Technologies which grew into a multinational firm known for its award-winning ALK CoPilot system for turn-by-turn navigation. He sold ALK to Trimble Navigation in December 2012. He was the Faculty Leader of Princeton’s entries in the 2005 DARPA Grand Challenge and 2007 Urban Challenge races for autonomous vehicles. Dr. Kornhauser holds a Bachelor of Science and a Master of Science in Aerospace Engineering from Penn State University where he was awarded the ASME Melville medal, and a PhD in Aerospace and Mechanical Engineering from Princeton University. 13 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 Dr. Jerome Lutin Chief Research EngineerJerome M. Lutin is retired from positions as Distinguished Research Professor at New Jersey Institute of Technology and as Senior Director of Statewide and Regional Planning at New Jersey Transit. Dr. Lutin has 49 years of professional experience in transportation. At NJ TRANSIT, he also served as Senior Director of Planning Research and Development. In that position he was responsible for the agency’s pilot projects of new technologies. Dr. Lutin is a Fellow of the Institute of Transportation Engineers. He has been actively involved in the development of ITS standards for the transit industry and teaches a course on standards for the National Transit Institute. He has written and lectured extensively on the subject of autonomous vehicles and implications for the transit industry. Dr. Lutin holds a Bachelor of Arts from Trinity College, a Master of Architecture and Urban Planning and PhD in Urban Planning both from Princeton University where he was awarded the American Institute of Architects Gold Medal for Academic Excellence. He is a licensed professional engineer and a certified planner. Project Benefits The primary objective of the research is to explore the opportunities and challenges resulting from the adoption of autonomous collision avoidance and autonomous emergency braking systems for buses in New York State in order to improve safety and reduce the casualty and liability expenses of bus transit properties. However, in the process of preparing the tools to quantify the potential benefits and develop the functional requirements of the AES for transit buses, other direct and indirect outputs will be produced to enhance the understanding of the technologies. These products by themselves could have significant immediate and long-term benefits. The information identified below can potentially be used in other studies, policymaking, pricing, investment decisions, change operation patterns, and others. Comprehensive analysis of collisions on transit buses: There is very little documented information in the literature related to collision of transit buses. This project will provide an extensive analysis of collisions on transit buses by reviewing data from both the NTD and the insurance claims database. This analysis will identify the rate of occurrence of each type of collisions, the situational circumstances of their occurrences (weather, road conditions, etc.), and the related costs. Development of functional requirements and standard procedures: One cannot understate the importance of assembling an expert panel on transit bus procurement, operations, and maintenance to recommend the safety specifications for next generation of transit buses. This project will develop the functional requirements and standard procedures 14 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 for deploying AES to transit buses and provide the potential estimate cost savings that the system may generate for bus transit operators in New York. Establishment of new safety rules and regulations for transit buses: This project will provide the framework toward recommending the establishment of new safety legislation, rules and regulations, and transportation system procedures based on the analysis of the collisions. Safety of transit buses: The adoption of AES for transit buses has great potential to reduce bus collisions and therefore improve safety of transit buses. As a result, injuries, fatalities, and the overall operating cost of transit agencies will decrease. Cost savings: This project will identify some cost savings generating from claims and insurance premiums. The financial savings from fewer bus accidents can then be invested in other aspects of transit operations and maintenance. Confidence of transit operators: Transit operators could have more confidence and less stress driving large vehicles in and around congested environments and narrow lanes. Availability of workforce: With fewer collisions, workforce can be directed to other needs instead of be assigned to tasks related with accidents. Increase reliability and perception of transit: With fewer collisions, bus transit services will improve its reliability and this will positively impact the public’s perception of bus transit services, thus promoting the bus transit’s image and growth. Path to Market Acceptance (one page). [TO BE EDITED BY ALAIN] Provide evidence that relevant stakeholders are interested in the technology being investigated. Explain how they would benefit from the technology being widely introduced in New York State and why they would be likely to favor that adoption over alternatives. Describe the barriers standing in the way of broad acceptance of the technology being studied and explain how the project will educate stakeholders about ways to avoid or break down these barriers. Characterize a plausible path to broader adoption of the technology, including a description of the resources and stakeholders that must be engaged to accomplish this. [ IDEAS PROPOSED BY JERRY]The entire research plan is designed to develop products that will allow new technology, autonomous collision avoidance systems for buses, to be developed quickly and safely in an environment that will encourage competition and innovation. It will develop functional requirements, standards and specifications that will meet the needs of transit operators. Development of standards for collision avoidance technology for buses has not yet been addressed by the industry. We seek to address the rapid development (and potential rapid rate of obsolescence) of the technology. According to FTA, the minimum expected life of a transit bus 15 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 is 12 years although buses can typically remain in service for 15 to 18 years. Digital technology, however, typically becomes obsolete within months or a few years at most. Bus manufacturers with whom we have spoken tell us that they function as systems integrators and will install whatever is required by a transit agency. However, most transit agencies do not have the in-house experience or expertise to provide specifications to manufacturers for autonomous collision avoidance systems and autonomous emergency braking. The transit bus industry is a “niche market” which does not make it financially viable for bus manufacturers to engage in extensive research and development. Proprietary collision avoidance systems acquired with a new bus would likely prove difficult to support with replacement parts and software during the life of the bus. Some bus manufacturers indicated they are working on offering collision avoidance systems provided by others, primarily systems to warn pedestrians that a bus is turning, or to warn the operator of an imminent collision. None has said they are working on autonomous emergency braking This project will provide the necessary functional requirements and specifications that a transit agency can incorporate in procurement documents for new bus purchases, and for retrofitting existing buses. Standards and functional specifications that address performance, electromechanical interfaces, networking, and sensor locations, would allow maintenance and change-out of components to require less time and expense. Such standards also allow more vendors to enter the market which can stimulate innovation and help reduce costs. Recent NYSDOT/NYSERDA Awards Dr. Camille Kamga, is currently the Principal Investigator on three funded projects by NYSERDA and NYSDOT titled: Implementing Eco-Driving in New York State: Opportunities and Challenges Hunts Point Terminal Market: The Feasibility of Waterborne Transportation as a Part of the Distribution System Reducing Incident-Induced Emissions and Energy Use in Transportation: Use of Social Media Feeds as an Incident Management Support Tool He was a Co-PI on the project “Freight Tricycle Operations in NYC: Evaluating Efficiency and Emissions Benefits for Last Mile Delivery” funded in 2012. He has received funding in 2013 to conduct a symposium titled “The use of small sized mobility solutions as a cleaner mobility option: the last mile problem” under the Education and Technology Transfer program. He was the principal investigator on two successfully completed projects funded by both NYSERDA and NYSDOT. The first on “Eliminating Trucks on Roosevelt Island for the Collection of 16 University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 Recyclables and Commercial Waste While Significantly Improving Energy Efficiency and Reducing Land Requirements” and the second project on “Underground Pneumatic Transport of Municipal Solid Waste and Recyclables Using New York City Subway Infrastructure” with Robert Ancar (NYSDOT) and Joseph Tario (NYSERDA) as project managers. Neither Dr. Kornhauser and Dr. Lutin were awarded an award by NYSDOT and NYSERDA in the past five years. Budget 17 Appendices N.Y. / Region Lincoln Tunnel Bus Collision Injures at Least 31, Snarling Traffic By EMMA G. FITZSIMMONS JUNE 10, 2015 Emergency workers placed injured commuters on stretchers after two buses collided in the Lincoln Tunnel. Credit Michael Appleton for The New York Times In the end, the crash turned out to be not too serious — a bus ran into the back of another bus. No one was seriously injured. But it was the timing and, more significantly, the location of the accident that quickly elevated it into a much bigger deal. It happened inside the Lincoln Tunnel at the tail end of rush hour on Wednesday morning, and before too long the delicate dance that keeps people flowing into New York City each day quickly unraveled. Bus passengers were wheeled out of the tunnel on stretchers. A pregnant woman stuck in traffic went into labor and was rushed to a hospital. And many drivers and passengers were trapped inside the tunnel, turning their commute into an hourslong odyssey that upended their days. The mess left some wondering what would happen to traffic if a worse crash occurred. “It doesn’t seem like there is any good way to get out of that place if it was something more serious,” said Dan Marcus, 22, of Wayne, N.J., who was stuck on a bus in the tunnel behind the crash. …… The two buses were traveling in the same lane as they neared the Manhattan side of the tunnel, and Mr. Chung’s bus did not stop in time to avoid hitting the bus ahead, he said. All told, 31 people were injured, most of them on the New Jersey Transit bus, officials said. All 31 were in stable condition and most were able to walk away from the crash. Four people who were carried out on stretchers had back or neck injuries, but no broken bones. On another New Jersey Transit bus, stuck behind the crash, a 32-year-old pregnant woman began to have contractions. Emergency officials stayed with her until they were able to transport her to a hospital, Capt. Richard Gutch, of the Port Authority Police Department, said. There was another pregnant woman on the same bus, but she refused medical treatment. University Transportation Research Center & Princeton Autonomous Vehicle Engineering, July 3, 2015 Proposal in response to NYSERDA PON3090 Appendix A.Resumes 19