paper - People Server at UNCW
advertisement

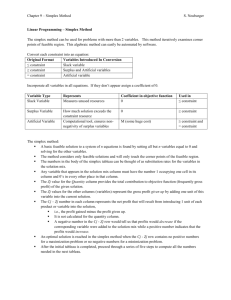
Algorithms of Linear Programming Marks Speight and Taylor Bishop Abstract This paper examines the improvements of linear programming time complexity and proves the importance of optimization in applied mathematics. The time efficiency of searching known constraints and maximizing the value of minimal inputs within the feasible region of a maximal value has increased from the convex hull and brute force to the geometric and exponential, and the simplex pivots with a linear complexity. The convex hull’s obstacles of finding all of the extreme points with brute force is overcome with its linear time of finding the high points. The geometric method is useful because the slope never changes as the system of linear equations solves for the maximal value which reduces the area of the feasible region of possible maximal value points until its value is found. Yet, the method limits at two decision variables. The simplex method involves hundreds and thousands of problem constraints. Invented by George Danztig in 1947, the simplex algorithm is the most common method of solving maximization problems. The conclusion of this paper result prove the importance of the method by demonstrating its capabilities in a simple maximization problem of interest. Key Words: Traveling Salesman Problem, Dynamic Programming, Branch and Bound, Convex Hull, Minimum Spanning Tree paper, the coefficients of the objective function and the constraint equation must be identified. Linear programming assumes the values to be constant over time. Many times during a study of a problem the factors of the constraints will change, but for the sake of linear programming and the methods described in this paper, the variables will remain certain. In each of these methods: convex hull, geometric and simplex, the basic steps of formulating the linear programming model will identify the parameters of the decision of inputs in linear algebraic functions and matrices, identify the constraints which restrict the decision of inputs in the form of linear function inequalities, and determine the objective which is to be optimized and the maximal value is identified. 2. Linear Programming Problems Problem of interest: maximize 3x + 5y subject to x + 3y ≤ 6 x+y≤4 x ≥ 0, y ≥ 0 machine M N Widget a 1 1 Widget b 3 1 Hours 6 4 1. Introduction The linear programming problem takes inequalities relating to a situation and finds the best value under those conditions. Linear programming is an important part of optimization in real life problems. The algebraic steps of solving this problem work with a simple two variable problem, though typical systems can have dozens of hundreds of variables. Real life application extends the model considering added constraints. The time complexities discussed in this paper focus on the efficiency of finding the boundary of the feasible region of the constraints. Examples of this problem include operational research, a branch of applied mathematics giving advice which perform the objective: minimization of production costs and maximization of profit. Limitations of linear programming include business problems which require the form of a quadratic equation. Before the linear program method is applied in the maximization problem in this The first method used to solve this problem is the convex hull which constructs a hull of extreme points within the feasible region bound by the linear inequalities. The hull represents the smallest polygon of intersecting constraint sets. The algorithmic clockwise linear search of the outer bound of these points produces the extreme points which when substituted into the maximizing equation 3x + 5y = z, where x is the number of Widget a produced and y is the number of Widget b, the point (3, 1) of the hull produces the maximal value of 14 and the plant will benefit from producing three Widget a’s and one Widget b, the greatest value of the four extreme points. Brute force finds the extreme points and is a limitation of the convex hull. The feasible region contains a line segment connecting two points, pi and pj if all other points of the set lie on the same side of the straight line through these two points. The test repeats this test for every pair of points and produces a list of convex points. The geometric method is another graphical method of finding the feasible region. The intersection points of constraint lines are solved by a system of linear equations. The sign of the constraints define the quadrant of the Cartesian plane of which the lines intersect, and calculating the value of the maximal value is possible by simply shifting the slope of a test z value of the maximizing equation up or down, i.e. 3x + 5y = 20 is obviously not in the feasible region. Shifting the value will eventually find the maximal value of 14. maximize 3x + 5y = P subject to x + 3y ≤ 6 x+y≤4 x ≥ 0, y ≥ 0 The method converts the system of inequalities (constraints) to equations using slack variables, sets the objective function equal to zero and creates a tableau with active variables labeled. The pivot is the column with the most negative number on the left side of the bottom row (if all the numbers on the bottom row are positive, the search stops). The constant column entry is divided by the positive entries of the pivot column and the pivot row is the smallest ratio of those values. The pivot is the entry is the positive number in the pivot column and pivot row. 1x + 3y + 1u + 0v = 6 1x + 1y + 0u + 1v = 4 -3x – 5y + 0u + 0v = 0 u = 6, v = 4 u x 1 y 3 u 1 v 0 v 1 1 0 1 4 -3 -5 0 0 0 0 1 - 1 0 0 0 2 u The time complexity of geometric is O(n2); and, similar to brute force, it is an inefficient method of finding the feasible region of problems with extreme points which increase exponentially with the number of constraint equations. During WWI, George Dantzig recognized the limitations of the previous algorithms and discovered a new way of handling the constraints of linear programming problems which is known as optimization. The brute force search of extreme points presents a problem for linear programming because of the size of the problem. The simplex method inspects a fraction of the extreme points and finds the maximal value. Like the convex hull and geometric methods, this method finds the extreme points in the feasible region and checking if the value of the object if function is improved by pivoting to adjacent extreme points. If not, the search stops, if so, continue searching points until the optimal solution is found. 3 1 v 3 4 x y 3 1 0 0 0 0 0 3 1 6 2 3 2 1 3 5 10 3 1 3 - 2 (constant) 2 1 2 2 1 1 2 1 14 x = 3, y = 1 Select the pivot which is the positive entry in the pivot column and pivot row and identify the new active variable. Perform row operations to make the remaining elements in the pivot column equal to zero and repeat the process by identifying the most negative entry in the last row. The process is repeated by identifying the most negative entry in the last row. Once the left side of the last row is all positive, the solution is the right most entry in the row. Geometric 3. Analysis The convex hull’s brute force worst case run time is O(n3) of initially sorting the n points of the sets. The best time of searching the clockwise extreme points is O(n). This proves to be an inefficient algorithm. The geometric method of linear programming is also limited in that it is only useful for problems involving two decision variables and cannot be used for three or more variables. The geometric method saves time from the convex hull method because instead of searching exhaustively for extreme points and then searching the positive and negative sides of a plane, the algorithm uses one slope which it changes to suit the possible input solutions of the feasible region. The obvious disadvantages of the geometric search is the sign check in the Cartesian plane which still leaves our results with an O(n2) runtime. While our problem did not require a method which searched thousands of variables and problems constraints, the steps of the problem identified the benefit of the pivot in saving time checking for maximal points within the bounded region of the extreme points. Given the n decision variables in our problem, the pivots converge in O(n) operations with O(n) pivots, thus the name linear programming. The method exploits the extreme points by taking advantage of the geometry of the problem, visiting vertices of a feasible set and checking the optimality of each visited vertex. The pivot operations become expensive without the advantages of cutting the plane which is demonstrated with the advancement of the geometric method incorporated into the simplex algorithm. 4. Results Convex Hull maximize 3x + 5y subject to x + 3y ≤ 6 x+y≤4 x ≥ 0, y ≥ 0 The extreme points are (0,2), (0,0), (3,2), (4,0). x=0 y=2 (0,2) = 10 3(0) + 5(2) = 10 x=0 y=0 3(0) + 5(0) = 0 (0,0) = 0 x=3 y=1 3(3) + 5(1) = 14 (3,1) = 14 x=4 y=0 (4,0) = 12 3(4) + 5(0) = 12 Minimizes 3x + 5y with a maximal value of 14. Simplex Simplex Matrix Example: Maximize:3x+5y Subject to: x+3y<=6 x+y<=4 x,y>=0 X 1 1 -3 Y 3 1 -5 1/3 R1 X 1/3 2/3 -4/3 3/2R2 X 0 1 0 Max=14 X=3 Y=1 S1 1 0 0 Y 1 0 0 Y 1 0 0 S2 0 1 0 M 0 0 1 R2-1(R1) S1 1/3 -1/3 5/3 R1-3R2 S1 ½ -1/2 1 C 6 4 0 S2 0 1 0 R3+5(R1) M 0 0 1 C 2 2 10 S2 -1/2 3/2 2 R3+(4/3R)2 M 0 0 1 C 1 3 14 5. Conclusion The solution to our problem is best solved by the simplex method due to its reduction capabilities which forge the idea of reducing known solutions to linear problems and producing the concept of optimization. The method can be difficult to notice mistakes when compared to the graphical method. The simplex method also has the advantage of addressing problems with more than two decision variables. Like the geometric method, the simplex method starts with a guess. There are volumes of data of the management decisions of which the method provides optimization techniques including ways to route shipments for transportation firms, a way of pricing products and the petroleum industry explores, blends and schedules distribution with the algorithm. 6. References Levin, Anany. Introduction to the Design & Analysis of Algorithms. 3 ed. England: Pearson, 2012. Print.