Optimal Adaptive Control of a Class of Nonlinear Networked Control
advertisement

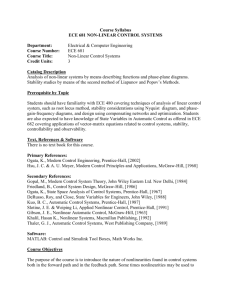
Optimal Adaptive Control of a Class of Nonlinear Networked Control Systems Investigators: Jag Sarangapani (sarangap@mst.edu, 573-341-6775) Funding Source: National Science Foundation T Actuator Plant Sensor Wireless Network Delay And Packet losses ca (t) sc (t ) Ip (t ) Ip (t ) Delay And Packet losses Controller Project Description: Approximate dynamic programming (ADP) is employed to overcome the curse of dimensionality of the classical dynamic programming and to obtain near optimal adaptive controllers. Neural dynamic programming (NDP) provides approximate solutions to dynamic programming where neural networks (NN) are used for function approximation. In recent years, adaptive critic architecture using NDP is being applied to design controllers for a class of affine nonlinear systems. Many of these designs are shown on a linear system and/or on nonlinear systems under nonideal circumstances when approximation errors and disturbances are nonzero. To overcome these limitations for real-time control of networked control systems, optimal adaptive controllers in continuous and discrete-time are being addressed by solving Hamilton-Jacobi-Bellman formulation. Therefore, the goal of this study is to provide online robust optimal adaptive ADP controllers forwardin-time, without utilizing policy and value iteration, but with adaptation, and learning for the control of unknown linear and nonlinear NCS, has guaranteed performance, and is supported by a rigorous and repeatable design and mathematical framework. The objectives are: 1. 2. 3. Develop online robust optimal adaptive critic control schemes (or NDP for nonlinear systems) for unknown linear and nonlinear NCS in continuous and discrete-time in the presence of delays and packet losses, approximation errors, and disturbances. Investigate the effects of delays, packet losses and quantization errors from the communication network on the system stability and performance. Develop online robust optimal adaptive critic-based output feedback control schemes (or NDP) for a class of unknown linear and nonlinear NCS in continuous and discrete-time. Demonstrate the Lypaunov stability in the presence of delays, packet losses, quantization errors, and disturbances. Design hybrid adaptive critic schemes by embedding iteration index based scheme within proposed time-based scheme to increase speed of convergence of the control inputs to optimal values. Develop online NDP schemes for unknown nonlinear distributed NCS. Compare the performance of the proposed robust adaptive critic control scheme with that of the traditional adaptive-critic schemes on benchmarking automotive and aerospace applications. Web link for this project: http://web.mst.edu/~sarangap/ Publications: Qiming Zhao, Hao Xu, and S. Jagannathan, “Neural network-based finite-horizon optimal control of uncertain affine nonlinear discrete-time systems”, IEEE Transactions on Neural Networks and Learning Systems, accepted for publication, March 2014. 1. Qiming Zhao, Hao Xu, and S. Jagannathan, “Optimal control of uncertain quantized linear discrete-time systems”, International Journal of Adaptive Control and Signal Processing, accepted for publication, January 2014. 2. W. Meng, Q.Yang, S. Jagannathan, “Adaptive neural control of high-order uncertain nonaffine systems: A transformation to affine systems approach”, Automatica, Accepted, January 2014. 3. Hao Xu and S. Jagannathan, “Neural network based finite horizon stochastic optimal control design for nonlinear networked control systems”, IEEE Transaction on Neural Networks and Learning Systems, accepted for publication, March 2014. 4. Qiming Zhao, Hao Xu, and S. Jagannathan, “Reinforcement neural network learning-based near optimal output feedback control”, Acta Automatica Sinica, accepted for publication, January 2014. (invited paper). 5. Qiming Zhao, Hao Xu, and S. Jagannathan, “Fixed final time optimal adaptive control of linear discrete-time systems in input-output form”, Journal of Artificial Intelligence and Soft Computing Research, accepted for publication, Sept 2013. (invited paper). 6. Hao Xu, S. Jagannathan, and F.L. Lewis, “Stochastic optimal output feedback design for unknown linear discrete-time system zero-sum games under communication constraints”, Asian Journal of Control, accepted for publication, May 2013. (invited paper). 7. S. Mehraeen, T. Dierks, S. Jagannathan, and Mariesa Crow, “Zero-sum two-player game theoretic formulation of affine nonlinear discrete-time systems using neural networks”, IEEE Transactions on Systems, Man and Cybernetics, vol. 43, no. 6, pp. 1641-1655, 2013.