Reduced Weight Rotor Blades as a Result of Flap-Bending Torsion Coupling
by
Michael R. Monico
A Thesis Submitted to the Graduate
Faculty of Rensselaer Polytechnic Institute
in Partial Fulfillment of the
Requirements for the degree of
MASTER OF SCIENCE
Major Subject: MECHANICAL ENGINEERING
Approved:
_________________________________________
Farhan Gandhi, Thesis Adviser
_________________________________________
Ernesto Gutierres-Miravete, Thesis Adviser
Rensselaer Polytechnic Institute
Hartford, Connecticut
August, 2013
© Copyright 2013
By
Michael R. Monico
All Rights Reserved
ii
TABLE OF CONTENTS
ACKNOWLEDGEMENTS .......................................................................................................... vii
ABSTRACT ................................................................................................................................. viii
1.
INTRODUCTION ................................................................................................................... 1
1.1.
PROBLEM STATEMENT .............................................................................................. 2
1.2.
BACKGROUND AND MOTIVATION ......................................................................... 2
1.3.
LITERATURE REVIEW ................................................................................................. 3
1.4.
SCOPE OF WORK .......................................................................................................... 5
2.
ANALYTICAL MODEL ........................................................................................................ 7
2.1.
MODEL SETUP .............................................................................................................. 7
2.2.
BLADE DISCRETIZATION ........................................................................................... 9
2.3.
INFLOW MODEL ......................................................................................................... 10
2.4.
DAMPING CALCULATION METHODOLOGY/APPROACH ................................. 11
3.
RESULTS .............................................................................................................................. 16
3.1.
BASELINE MODEL ..................................................................................................... 16
3.1.1.
STIFFNESS MATRIX IMPLEMENTATION IN DYMORE ................................... 20
3.2.
LEADING EDGE COUNTER WEIGHT (LECW) REMOVAL .................................. 23
3.3.
FLAP WEIGHT ADDITION ......................................................................................... 29
3.4.
EFFECTS OF FLAP-BENDING TORSION COUPLING ........................................... 33
4.
CONCLUSIONS AND RECOMMENDATIONS ................................................................ 37
5.
OPPORTUNITIES FOR FUTURE WORK .......................................................................... 40
6.
APPENDIX A: FREQUENCY AND DAMPING PREDICTIONS ..................................... 41
7.
REFERENCES ...................................................................................................................... 49
iii
TABLE OF TABLES
Table 1: S-76D Point Coordinates .................................................................................................. 8
iv
TABLE OF FIGURES
Figure 1: S-76D Rotor Topology (Point Definition) ...................................................................... 8
Figure 2: S-76D Rotor Topology (Joint Definition) ....................................................................... 9
Figure 3: Sample Dwell ................................................................................................................ 14
Figure 4: Baseline Frequencies (DYMORE IV vs. RCAS) .......................................................... 16
Figure 5: Baseline Rotor Speed Sweep Damping (DYMORE IV vs. RCAS).............................. 18
Figure 6: Baseline Collective Sweep Damping (DYMORE IV vs. RCAS) ................................. 19
Figure 7: Frequency Prediction (Sectional Properties vs. Stiffness Matrix) ................................ 22
Figure 8: Rotor Speed Sweep Damping Predictions (Sectional Properties vs. Stiffness Matrix) 23
Figure 9: Airfoil Cross Section (LECW Location) ....................................................................... 24
Figure 10: Rotor Blade Top View (LECW Location) .................................................................. 24
Figure 11: Frequencies with LECW Removed ............................................................................. 26
Figure 12: Damping Ratio with LECW Removed ........................................................................ 27
Figure 13: Collective Sweep Damping Ration with LECW Removed......................................... 28
Figure 14: Layout of LECW Removal and Flap Weight Addition ............................................... 29
Figure 15: Frequencies with LECW Removed Plus Flap Weight ................................................ 30
Figure 16: Rotor Sweep Damping Ration with LECW Removed Plus Flap Weight ................... 31
Figure 17: Collective Sweep Damping Ration with LECW Removed Plus Flap Weight ............ 32
Figure 18: Frequencies with 30% Flap-Bending Torsion Coupling ............................................. 34
Figure 19: Rotor Speed Sweep Damping Ratio with 30% Coupling ........................................... 35
Figure 20: Collective Sweep Damping Ratio with 30% Coupling ............................................... 36
Figure 21: Parametric Results of Flap Bending Torsion Coupling (Rotor Speed Sweep) ........... 38
Figure 22: Parametric Results of Increased Flap-Bending/Torsion Coupling (Collective Sweep)
....................................................................................................................................................... 38
Figure 23: Baseline S-76D Southwell Diagram............................................................................ 41
Figure 24: Baseline S-76D Rotor Speed Sweep ........................................................................... 41
Figure 25: Baseline S-76D Collective Sweep ............................................................................... 42
Figure 26: S-76D Southwell Diagram with LECW Removed...................................................... 43
Figure 27: S-76D Rotor Speed Sweep with LECW Removed ..................................................... 43
Figure 28: S-76D Collective Sweep with LECW Removed ......................................................... 44
v
Figure 29: S-76D Southwell Diagram with LECW Removed Plus Flap Weight ......................... 45
Figure 30: S-76D Rotor Speed Sweep with LECW Removed Plus Flap Weight ........................ 45
Figure 31: S-76D Collective Sweep with LECW Removed Plus Flap Weight ............................ 46
Figure 32: S-76D Southwell Diagram with LECW Removed Plus Flap Weight and 30%
Coupling........................................................................................................................................ 47
Figure 33: S-76D Rotor Speed Sweep with LECW Removed Plus Flap Weight and 30%
Coupling........................................................................................................................................ 47
Figure 34: S-76D Collective Sweep with LECW Removed Plus Flap Weight and 30% Coupling
....................................................................................................................................................... 48
vi
ACKNOWLEDGEMENTS
I would like to thank Professor Farhan Gandhi for all of his guidance through the
progression of this study. I would also like to acknowledge the Sikorsky Aircraft
Dynamics group for all of their support and invaluable feedback that aided in the success
of this study.
vii
ABSTRACT
The use of composite tailored coupling in rotor blades, to improve rotor stability,
was studied through aeroelastic analysis. The rotor design for this analysis was based
upon the S-76D. The computational structural dynamics (CSD) code used in this study is
known as DYMORE. DYMORE is a finite element based analytical tool for modeling
nonlinear multi-body system and has the capability of applying aerodynamic loads to a
user defined structure.
Rotor blade structural properties were modified in DYMORE to model the effect
of removing leading-edge counter weight. Weight was then added to simulate the effect
of installing components necessary for an active trim-tab/flap. Flap-bending/torsion
coupling was incorporated into the model in order to regain rotor stability with no net
increase in blade weight.
Simulated rotor speed sweeps and collective sweeps were performed in hover.
Stability dwells were performed to perturb the blade at the desired frequencies and the
rate of decay quantified using partial floquet projected onto a subspace.
The results of this study indicate that flap-bending/torsion coupling, achieved via
composite coupling, extends the stability boundary. Flap-bending/torsion coupling
stiffness equivalent to 30% of the flatwise bending stiffness is sufficient to gain a 16%
increase in damping of the first elastics flap mode. Greater improvements can be realized
with increased amounts of coupling; however, advances in composite technology will be
required for practical applications.
viii
1. INTRODUCTION
The Sikorsky S-76 is a medium-size commercial utility helicopter manufactured
by the Sikorsky Aircraft Corporation. This aircraft features a four bladed main and tail
rotor powered by twin turboshaft engines. Developed in the mid-1970s, this aircraft was
initially designated the S-74 and was later changed to the S-76 in honor of the U.S.
Bicentennial.
Design work from the S-70, which was selected for use by the United States
Army as the UH-60 Black Hawk, was incorporated into the S-76 rotor blades and rotor
head. Although similar technology from the S-70 was incorporated into the S-76 design,
there are still significant differences between these aircraft. These differences become
evident in the smaller scale of the S-76 as noted by the decreased rotor radius and blade
chord.
The S-76 was Sikorsky’s first helicopter designed purely for commercial use (e.g.
corporate transportation, oil drilling industry). The first production variant, designated
the S-76A, set model class records in 1982 for range, climb, speed and ceiling. While
continuous improvements have been incorporated into the production line over the past
thirty years, there are still more advances that can be made in blade design to improve
the range of the aircraft. These improvements will increase the efficiency of the aircraft
thus saving on fuel expenses and allowing the oil drilling industry to travel further
offshore or carry more cargo.
While significant advances have been made to improve the capabilities of the
current rotor design, “rotor blades have remained largely unchanged and are mostly
restricted to optimizing the twist, taper, sweep and occasionally the tip shape…”[1].
With the incorporation of aeroelastic coupling deliberately designed into a composite
rotor blade, it is theorized that the helicopter rotor weight can be significantly reduced by
extending the stability boundary without the use of parasitic masses. Elimination of the
parasitic masses, located in the leading edge of the rotor blade, allows for a significant
weight savings. These masses however, are incorporated into the current blade design in
order to mitigate flutter. Through the use of composite coupling, a flap up twist down
phenomenon can be achieved, mitigating flutter and therefore eliminate the need for
leading edge counter weight.
1
1.1. PROBLEM STATEMENT
Blade flutter is the self-excited vibration of a blade caused by interaction of
structural-dynamic and aerodynamic forces. To mitigate the onset of flutter, rotor blades
are typically designed so that the blade sectional center of gravity (CG) is forward of the
corresponding aerodynamic center (AC). Based upon the airfoil shape, the AC is
generally near the ¼ chord and is not easily altered. To have sufficient CG and AC
placement, the only parameter that can efficiently be adjusted while still maintaining
aerodynamic performance is the CG. To achieve acceptable CG placement, leadingedge counter weight is often added for stability. The addition of these parasitic masses
increases the weight of the rotor blades unnecessarily, thus inhibiting aircraft range and
limiting the amount cargo that can be carried.
The purpose of this study is to remove the leading-edge counter weight and
achieve stability through flap bending torsion coupling without adding parasitic weight.
1.2. BACKGROUND AND MOTIVATION
When designing a helicopter, weight is one of the most important design
parameters. The empty weight of an aircraft dictates the amount of cargo, personnel and
fuel that can be carried. This directly translates into the aircrafts range, or more simply
stated, how far the aircraft can fly. An aircraft that can carry more cargo and/or personal
is very attractive to the military because this means fewer trips to transport troops and
cargo. Greater range is attractive for civil use particularly for the oil industry.
Transporting personnel to offshore oil rigs requires a helicopter that can land on a small
helipad. A helicopter with greater range increases the area where possible oil rigs can be
located to provide additional opportunities for the oil industry.
The leading edge counter weights (LECW) installed on the S-76D main rotor
blade accounts for approximately 7.0 lbs. of blade weight. If all of the LECW were to
be removed, the weight of the S-76D blade can be reduced by 7%. The S76D main rotor
has 4 blades; therefore, a maximum of 28 lbs. can be removed from the rotor system by
simply removing the parasitic weight. Consequently, this comes with the risk of flutter
instability, but can be mitigated with composite coupling.
2
To put this weight saving into perspective, standard jet fuel (Jet A) has a density
of 6.8lb/US gal. If the 28 lbs. of LECW were replaced with additional fuel, the aircraft
could carry an additional 4.1 gallons of fuel. The S-76C++ twin turbine helicopter gets
about 1.65 miles per gallon carrying 12 passengers at cruise speed (140 KTS). An
additional 28 lbs. of fuel will increase range approximately 6.8 miles.
Even if weight savings cannot be achieved, the implementation of flap-bending
torsion coupling has the potential to extend the stability boundary. An increase in
stability margin will allow for additional weight aft of the feathering axis. This could be
the result of incurred damage in the field and a repair performed to restore the blade
back to a flight worth configuration. The benefit of flap-bending torsion coupling now
translates into longer service life of the rotor blade. In addition, features such as active
flaps and/or active trim tabs become more attractive because they can be implemented
into the blade without adding additional weight.
1.3. LITERATURE REVIEW
The aeroelastic analysis of composite rotor blades includes two steps:
1) The calculation of composite blade cross-section structural properties
2) The analysis of composite rotor blade aeroelastic behavior
Utilizing a detailed structural analysis, the composite blade properties are
calculated at various spanwise stations along the blade. The calculated stiffness matrix,
including all off diagonal coupling terms, are used as inputs into a comprehensive
aeroelastic analysis code. The analysis is then performed to characterize the dynamic
response of the blade.
Jung, Nagaraj and Chopra [3], have studied and written reviews on their results
of structural modeling of composite blades. Their studies include modeling of thin and
thick-walled composite blades. Also encompassed in their studies is the structural
analysis of single cell box beams and multi-cell generalized sections. In Jung, Nagaraj
and Chopra’s report, “Assessment of Composite Rotor Blade Modeling Techniques,” [3]
they reviewed the influence of non–uniformities in blade properties, non-classical
structural effects, large deformations, aeroelastic stability in hover and in forward flight,
aeromechanical stability and design optimization. To ensure good blade configurations
3
have been found, a series of validation test including wind tunnel tests were
recommended [3].
The structural modeling of composite blade sections can be categorized into two
groups. These groups include direct analytical methods [4] and finite element analysis
[5]. Direct analytical methods are based upon a combination of beam theory, plate
theory and classical lamination theory. These methods can provide a basic physical
understanding of the structural behavior and are useful for design optimization studies.
Finite element analysis can be used to model complex geometries and non-uniformities
of a cross-section. This method is particularly useful for detailed stress analysis.
Work performed by Hong and Chopra [4] include modeling a composite blade
as a laminated thin-walled beam. The effects of aeroelastic stability in hover were
studied. Their research included the modeling of extension-torsion coupling, flapbending/torsion coupling and chordwise-bending/torsion coupling. Analysis showed
that lag mode damping was strongly affected by the chordwise-bending/torsion coupling.
Analysis also showed that flap mode stiffness was strongly influenced by flapbending/torsion coupling.
Nixon [5] investigated the possibility of improving stability and performance of
tiltrotors through the use of composite coupling. The results of his work indicate that
passive blade twist control via elastic extension/torsion coupling has the potential to
improve tiltrotor aerodynamic performance. Nixon’s work also showed that the flutter
velocity of a tiltrotor could be increased with bending/torsion coupling of the rotor blade
without adversely effecting performance or blade loads. Nixon, Piatak, Corso and
Popelka [8] continued the study of stability augmentation and performance enhancement
for tiltrotor aircraft via composite coupling. Their work focused on four unique
aeroelastic tailoring concepts:
1) Bending-twist coupling in the wing to augment aeroelastic stability
associated with whirlflutter in high-speed airplane mode
2) Bending-twist coupling in the wing to augment aeromechanical stability of
soft-inplane rotor systems subject to ground and air resonance
4
3) Bending-twist coupling in the rotor blades to reduce rotor pitch-lag coupling
thereby augmenting aeroelastic stability associated with whirlflutter in highspeed airplane mode
4) Extension-twist coupling in the rotor blades to optimize blade twist
distribution between hover and cruise thereby gaining an aerodynamic
performance improvement
The results of their work showed that either wing or blade tailoring may be used to
significantly increase the aeroelastic stability boundaries for tiltrotors in high-speed
flight.
1.4. SCOPE OF WORK
The objective of this analysis was to define the requirements for designing a
stable S-76D rotor blade, without installing leading edge counter weight. This work is
segmented into three main phases. These phases consist of model validation, the effect
of weight removal and the effect of cross coupling.
The first phase of this work (model validation) is focused on verifying that the
DYMORE model is consistent with previous work and produces similar results. During
the design of the S-76D, Sikorsky Aircraft performed aeroelastic analysis of the main
rotor blade using a code known as RCAS (Rotorcraft Comprehensive Analysis System)
developed by ART (Advanced Rotorcraft Technology Inc.). RCAS is a structural
dynamics code similar to DYMORE and is an interdisciplinary tool that offers
aeroelastic modeling capability. The fundamental difference between these two codes is
that DYMORE solves the equations of motion and performs stability analysis through a
time based formulation, while RCAS institutes eigenanalysis of the linearized system
matrices. These are two different approaches, but if the models are consistent between
the two codes, the results will be the same. To verify that the models are consistent,
frequency and damping plots are compared.
The second phase of this work was focused on quantifying the effect LECW
removal has on stability. The baseline S76D blade properties are updated to model the
change in weight and CG as a result of removing led slugs located in the leading edge of
the airfoil. By removing the led slugs, the first elastic torsion mode is expected to
5
decrease in frequency, thus increasing the likelihood that it will interact with the first
elastic flap mode and result in a flutter instability. Frequency and damping plots are
generated to quantify the change between the baseline and modified blade. Alternative
methods of exciting flutter are also investigated. This includes adding weight aft of the
feathering axis that models the effect of incorporating components for an active flap
and/or trim tab.
The final phase of this study quantifies the effect of flap-bending torsion
coupling and characterizes the amount of coupling required to regain stability (i.e. lost
margin). A parametric approach is taken to quantify the required amount of cross
coupling. With the required amount known, the feasibility of achieving those levels is
then determined based upon the necessary ply-layup.
6
2. ANALYTICAL MODEL
A CSD code is utilized to predict the stability of the S-76D rotor blade. The
CSD software package is known as DYMORE (version 4.0) and is commonly used in
industry and academia for modeling helicopter rotors. DYMORE is a finite element
based analytical tool for modeling nonlinear multi-body systems and has the capability
of applying aerodynamic loads, via table lookup to a user defined structure. The
structure can be made up of various beams, rigid bodies, springs, dampers and joints.
To examine aeroelastic stability, a single blade analysis is performed in hover.
Southwell natural frequency diagrams and damping plots are generated for rotor speed
sweeps to model rotor startup. Southwell natural frequency diagrams and damping plots
are also generated for collective sweeps that model conditions in which the rotor is being
loaded and additional thrust is required.
2.1. MODEL SETUP
The DYMORE model is built by defining a series for beams, rigid bodies,
springs, dampers and joints that are representative of the structure being modeled.
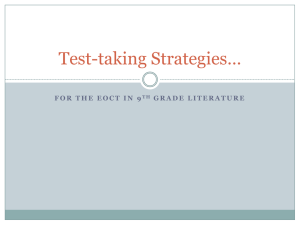
Figure 1 and Figure 2 show graphical depictions of the rotor topology as it is defined in
the DYMORE model. Beams are represented as black rectangles, rigid elements as
brown ellipses and points as red dots. Figure 1 outlines how the points are located in
space and how the various beams and rigid elements are arranged relative to those
points. The spatial coordinate definition for each point can be found in Table 1.
In this model, the blade is represented as a single straight beam. This is
simplified from the actual blade because the sweep is not modeled directly, but by
sweeping the structural and aerodynamic properties appropriately. There are also some
simplifications and assumptions made with respect to the control system. The
swashplate is not modeled and all the effects of the control system (e.g. control system
stiffness) rollup into the pitch link beam. If the user were to investigate the effect of
varying control system stiffness this could be accomplished by adjusting the axial
stiffness of the pitch link beam.
Some additional assumptions include an infinitely rigid hub, pitch horn and
damper connections that tie back to the blade and hub.
7
PointHubCenter
PointHinge
Hub
R
o
t
o
r
S
h
a
f
t
Ground
BldRootRetention
PointBladeTip
PointPitchHorn
BldRootConn1
Blade
BldRootConn2
PointBladeRoot
PointPushrodTop
DmpBeam
PointDamperInboard
PointDamperOutboard
PointRotorShaftBottom
PointPushrodBottom
PitchLinkBeam
Figure 1: S-76D Rotor Topology (Point Definition)
Table 1: S-76D Point Coordinates
Coordinate (ft)
Nomenclature
X
Y
X
PointHubCenter
0.00000E+00 0.00000E+00 0.00000E+00
PointRotorShaftBottom 0.00000E+00 0.00000E+00 -5.00000E-01
PointHinge
8.27080E-01 1.01500E-01 0.00000E+00
PointPitchHorn
1.44917E+00 1.01500E-01 0.00000E+00
PointPushrodTop
1.01183E+00 6.29230E-01 -1.20230E-01
PointPushrodBottom
1.02508E+00 6.60580E-01 -1.15058E+00
PointBladeRoot
2.17917E+00 -1.01500E-01 0.00000E+00
PointBladeTip
2.20000E+01 1.01500E+00 0.00000E+00
PointDamperOutboard 2.17917E+00 -3.14910E-01 -1.46800E-02
PointDamperInboard
8.27080E-01 -4.52420E-01 0.00000E+00
The S-76D is a fully articulated rotor with a collocated lag, flap and pitch hinge.
Figure 2 shows a graphical depiction of the various types of hinges used in this model.
Spherical joints are represented as blue spheres, universal joints as blue hour glasses,
revolute joints as blue cylinders and prismatic joints as three blue lines with the
centerline offset from the other two. A revolute joint is located at the base of the hub
which is used to prescribe the desired rotor rotation with the rotor shaft fixed to ground.
8
Prismatic joints are used at locations where linear displacement either occurs
(free joint) or must be prescribed (controlled joint). These locations include the pitch
link and lag damper. The prismatic joint at the base of the pitch link is used to prescribe
the desired amount of collective input and the prismatic joint at the damper beam is used
to model stroking of the lag damper.
The remaining joints are used to model the appropriate degrees of freedom at the
various connection points. For example, on the aircraft the base of the pitch link is
connect to the swashplate with a universal joint allowing for rotation about two axes and
to the pitch horn with a spherical joint allowing for rotation about all three axes. In
Figure 2, the model is consistent with the actual aircraft utilizing a universal joint at the
base of the pitch link and a spherical joint at the top of the pitch link where it attaches to
the pitch horn.
RVJFlapHinge
RVJLagHinge
Hub
RVJHub
BldRootRetention
R
o
t
o
r
S
h
a
f
t
RVJPitchHinge
BldRootConn2
BldRootConn1
Blade
ShjPitchLink
DmpBeam
UnjDmp
PrjDmp
ShjDmp
PitchLinkBeam
Ground
PrjPitchLink
UnjPitchLink
Figure 2: S-76D Rotor Topology (Joint Definition)
2.2. BLADE DISCRETIZATION
In the DYMORE model, the blade is modeled as a single straight beam, but is
broken into several finite elements. When creating a finite element discretization of the
multi-body system, the user has the ability to define a set of inputs that fully
9
characterizes the discretization. In DYMORE, these inputs are defined as mesh
parameters.
The mesh is defined by the number of elements along the curve (beam) and their
order. The curve is broken into N elements each of order O.
If order 1 is defined, the corresponding elements will use linear shape
functions
If order 2 is defined, the corresponding elements will use parabolic shape
functions
If order 3 is defined, the corresponding elements will use cubic shape
functions
Typically, the curve is divided into evenly spaced elements, but the user has the
ability to define a non-uniform distribution if desired.
For the S-76D DYMORE model, the blade is discretized into 13 unevenly spaced
elements each of order 3. Therefore, this blade features as total of 13 x 3 + 1 = 40 nodes.
Each beam has 6 degrees of freedom per node resulting in a blade with a total of 40 x 6
= 240 degrees of freedom.
The RCAS model built by Sikorsky Aircraft, used as the basis of comparison to
validate the DYMORE model, defines a total of 13 unevenly spaced nodes. Each finite
element has a total of 6 Gauss points; therefore, the blade features a total of 13 x 5 + 1 =
66 nodes. Each beam has 6 degrees of freedom per node resulting in a blade with a total
of 66 x 6 = 396 degrees of freedom.
It is important to note these differences in discretization when comparing
frequency and damping predictions from each code. This is especially important when
comparing differences in the elastic modes.
2.3. INFLOW MODEL
Aerodynamics loads are applied to associated beams in DYMORE via a lifting
line. A lifting line is a component of the aerodynamic model and is defined as a
collection of airstations at which aerodynamic loads are computed. The motion of the
lifting line is determined by the calculated deformation of the various associated beams
as a result of the applied aerodynamic loads.
10
The lifting line is defined by a set of properties. These properties include number
of airstations, position, orientation, chord length, quart-chord offset, and airfoil
properties. The lifting line properties are composed of three tables which include
definition of the lift, drag and moment coefficients for a given angle of attack and Mach
number associated with the appropriate airfoil.
The airstation positions can either be spaced uniformly along the span or defined
explicitly by the user to adhere to a desired distribution. For this model, a total of 50
airstations are spaced uniformly along the span.
Of the various types of inflow that can be defined in DYMORE, each
incorporates unsteady aerodynamics. DYMORE does not have an option for quasisteady aerodynamics, but if desired, the results of quasi-steady aero can be post
processed and back calculated based upon the angle of attack and Mach number time
histories. For this study, dynamic inflow is defined for all calculations performed with
aerodynamics. The dynamic inflow model in DYMORE institutes the He-Peters
Dynamic Wake Model and allows the user to define the desired number of inflow modes
which determine the number of harmonics for the states used for the solution over the
inflow disk. Because the dynamic wake model is formulated in the fixed frame, in order
to accurately capture N/rev loads the user must define N + 1 modes of dynamic inflow.
In this study, a four bladed rotor is modeled; therefore, when performing forward flight
simulations it is best to define 5 modes of dynamic inflow. For most cases evaluated in
the study, simulations were performed in hover. Under these conditions, uniform inflow
is sufficient. As a result, 1 mode of dynamic inflow was applied.
2.4. DAMPING CALCULATION METHODOLOGY/APPROACH
When calculating the damping ratio for various blade modes, there are two
fundamental approaches. These include eigenanalysis and signal processing of blade
motion time histories.
RCAS institutes eigenanalysis when calculating frequency and damping
characteristics. The user has the option of performing this analysis in a vacuum or in air.
If the use selects “modal analysis” eigenanalysis of the linearized system matrices
without aerodynamic terms is performed. The analysis yields system modal frequencies
11
and mode shapes, which may be real or complex. From the complex eigenvalues, the
frequency and damping coefficients can be determined. If the user were to select
“aeroelastic stability analysis” eigenvalues of the linearized system matrices with
aerodynamics terms is performed. Again, the analysis yields stability mode shapes,
associated frequencies and damping levels.
Eigenvalues can be used to determine whether a fixed point (i.e. equilibrium
point) is stable or unstable. When eigenvalues are of the form a + bi, there are three (3)
unique cases. These cases include the following:
1) a is positive → system is unstable
2) a is zero → system is undamped
3) a is negative → system is stable
Note: When the complex component is non-zero, the system will be oscillatory.
Case 1: Positive Real Component (Unstable)
𝑎 + 𝑏𝑖
Where a > 0 and b ≠ 0
Case 2: Zero Real Component (Undamped)
𝑎 + 𝑏𝑖
Where a = 0 and b ≠ 0
12
Case 3: Negative Real Component (Stable)
𝑎 + 𝑏𝑖
Where a < 0 and b ≠ 0
DYMORE was the aeroelastic code utilized in this study and it institutes a time
history based solver. DYMORE does not perform complex eigenanalysis; therefore,
complex eigenvalues cannot be used to determine modal frequencies, modes shapes and
damping coefficients. In order to extract damping coefficients from the model, stability
dwells are performed at the frequencies of interest. Floquet theory is used to process the
time history signal in order to calculate the amount of damping present. This approach
more closely aligns with the process for measuring the damping in a physical system.
Although DYMORE does not calculate complex eigenvalues, it does perform a
real eigenanalysis. These eigenvalues can be used to determine modal frequencies, but
does not provide any information about damping. These eigenvalues can be extracted
from the model when running “static” cases in order to generate a Southwell diagram.
The generation of a Southwell diagram is the first step towards quantifying the damping
13
coefficient for the modes of interest. The blade modes can be identified by generating a
Southwell diagram using the eigenvalues calculated for a rotor speed sweep.
For this study the researched is primarily interested in the 1st elastic flap (i.e. 2nd
flap) and 1st torsion mode. When these two modes interact with one another, classic
flutter will occur. By introducing flap-bending torsion coupling into the rotor blade
properties, it is hypothesized that the onset of flutter can be mitigated. This will be
evident via an increase in the damping coefficient of the 1st elastic flap mode.
DYMORE does not do complex eigenanalysis like RCAS, but instead takes a
time based approach. With the modal frequencies known via a Southwell diagram,
stability dwells can now be performed. For a given rotor speed, an oscillatory load is
applied at the tip of the blade. This oscillation is prescribed such that the frequency
matches the modal frequency of interest. The oscillatory load excites the blade at its
natural frequency for several seconds and is then stopped abruptly. At the instant the
load is removed, the blade is allowed to oscillate for several seconds. The rate at which
the signal decays defines the damping coefficient for that mode.
Figure 3: Sample Dwell
Figure 3 shows a sample time history for a dwell performed at the 1st elastic flap
mode natural frequency when operating at a rotor speed of 100% Nr. As can be seen in
the figure, the oscillatory load is applied for the first 2000 time steps. The load is then
abruptly cut at time step 2000 and the blade is allowed to oscillate for another 1000
14
steps. As depicted in Figure 3, the blade is well damped since the oscillation decays
very rapidly and ceases after two cycles.
There are several ways to calculate damping from a time history. One of the
most straightforward approaches is known as the logarithmic decrement. The
logarithmic decrement, δ, is used to find the damping ratio of an underdamped system in
the time domain. The logarithmic decrement is the natural log of the ratio of the
amplitudes of any successive decrement:
𝟏
𝒙(𝒕)
𝒏
𝒙(𝒕+𝒏𝑻)
𝜹 = 𝒍𝒏
Eq. 1
Where:
x(t) = amplitude at time t
x(t + nT) = amplitude at n periods away
n = number of periods
The damping ration is then found from the logarithmic decrement:
𝝇=
𝟏
𝟐
√𝟏+(𝟐𝝅)
𝜹
Eq. 2
As useful as this method is, it can only be used if the observer can clearly see the
oscillations. In many systems there is often more than one frequency present in the time
history signal. This makes it very difficult if not impossible to distinguish one from
another without some type of post processing or filtering of the signal. For this reason,
alternative methods are often utilized. In this study, Floquet theory was implemented.
15
3. RESULTS
3.1. BASELINE MODEL
Baseline S76D Frequency
solid = DymoreIV; dash = RCAS
10P
30
9P
8P
7P
6P
5P
1L
1F
2F
1T
2L
25
4P
Frequency (Hz)
20
3P
15
2P
10
1P
5
Nominal Nr = 293 RPM
0
0
50
100
150
200
250
300
Rotor Speed (RPM)
Figure 4: Baseline Frequencies (DYMORE IV vs. RCAS)
Plotted in Figure 4 is the Southwell diagram for the S-76D main rotor blade. The
solid lines are the predictions using DYMORE IV and the dashed lines are the
predictions using RCAS. RCAS was the code used during the development of the S76D blade and is used as a basis of comparison in order to validate the DYMORE IV
model. The first 5 modes are plotted in Figure 4, each represented by a different color.
The blue curve is the first rigid lag mode, the green curve is the first rigid flap mode, the
red curve is the first elastic flap mode, the cyan curve is the first torsion mode and the
purple curve is the first elastic lag mode.
The first two rigid modes (i.e. rigid lag and rigid flap mode) compare well
between RCAS and DYMORE. The frequency placement for these two modes is
16
predominantly driven by the rotor geometry. Since these two modes compare well, it is
an indication that the geometry is consistent between the two codes.
Towards the higher modes, differences become more apparent. DYMORE and
RCAS predict very similar trends for the first elastic flap mode, although DYMORE
clearly predicts frequencies that are lower than RCAS. The differences are small and are
likely the result of dissimilarities in blade discretization. These differences were
discussed in section 2.2. Since the discrepancies in frequency appear in the elastic
modes, perhaps the more obvious reason is because of variations in elastic blade
properties; however, these codes both utilize an identical set of blade property inputs.
Still moving higher in frequency to the first torsion mode, we observer a
difference in trend between DYMORE and RCAS. Upon closer inspection it was
determined that this mode was not a pure torsion mode throughout the entire RPM range.
This mode starts as a second elastic flap mode and transitions into a torsion mode above
230 RPM. Taking this into account, DYMORE under predicts the second elastic flap
mode and over predicts the torsion mode.
The frequency placement of the torsion mode is very sensitive to changes in
torsion stiffness of the blade and control system stiffness. Since the blade properties are
identical between the two codes, the higher torsion mode predicted by DYMORE is
predominantly the result of a difference in the control system stiffness and somewhat
due to blade discretization.
When modeling the control system stiffness in both DYMORE and RCAS, it is
represented as a single value. In the S-76D DYMORE model, the control system
stiffness is modeled via the axial stiffness of the pitch rod. Since there is no swashplate
included in this model, the stiffness of the pitch rod incorporates the cumulative effect of
all components downstream and their associated stiffness. This included components
such as the swashplate and servos. The problem with this approach, although suitable
for this study, is that the control system stiffness cannot be accurately represented as a
single stiffness value because the stiffness varies around the rotor azimuth [13]. As the
rotor turns, the pitch rod that is attached to the swashplate passes over three servos at
non-uniform intervals. As the pitch rod passes over the servos, the effective stiffness
changes. For this reason, variations in control system stiffness are expected.
17
Baseline S76D Damping Ratio
solid = Dymore4; dash = RCAS
1L
1F
2F
1T
2L
0.6
Damping Ratio
0.5
0.4
0.3
0.2
0.1
Nominal Nr = 293 RPM
0
0
50
100
150
200
250
300
Rotor Speed (RPM)
Figure 5: Baseline Rotor Speed Sweep Damping (DYMORE IV vs. RCAS)
Plotted in Figure 5 are the damping predictions for a rotor speed sweep in hover
at flat pitch. The solid curves are the DYMORE IV predictions and the dashed curves
are the RCAS predictions. The estimated damping ratio is plotted for the first 5 blade
modes. The blue curve is the first rigid lag mode, the green curve is the first rigid flap
mode, the red curve is the first elastic flap mode, the cyan curve is the first torsion mode
and the purple curve is the first elastic lag mode.
In general, the DYMORE predictions compare well with the RCAS predictions.
The trends are consistent between the two codes and predict similar damping ratios for
each of the modes. The values are not identical, but this is to be expected because
DYMORE solves the equations of motion in the time domain, while RCAS linearizes
the system matrices and uses eigenanalysis to solve the dynamics problem.
As this study progresses, focus was placed upon the first elastic flap mode.
When the first elastic flap and torsion mode interact with one another, the instability
known as flutter will occur. When flutter occurs, the damping ratio for the first elastic
18
flap mode will decrease and the torsion mode will begin to increase. The remaining
modes are predominantly unaffected and provide little insight about flutter.
Baseline S76D Damping Ratio
solid = DYMORE IV; dash = RCAS
0.45
1L
1F
2F
1T
2L
0.4
0.35
Damping Ratio
0.3
0.25
0.2
0.15
0.1
0.05
0
0
2
6
4
8
10
Collective (deg)
Figure 6: Baseline Collective Sweep Damping (DYMORE IV vs. RCAS)
Plotted in Figure 6 are the damping predictions for a collective sweep in hover.
The solid curves are the DYMORE IV predictions and the dashed curves are the RCAS
predictions. The estimated damping ratio is plotted for the first 5 blade modes. The blue
curve is the first rigid lag mode, the green curve is the first rigid flap mode, the red curve
is the first elastic flap mode, the cyan curve is the first torsion mode and the purple curve
is the first elastic lag mode.
In general, the DYMORE predictions compare well with the RCAS predictions.
The trends are consistent between the two codes, but there are differences in the absolute
values. As highlighted for the rotor speed sweep damping predictions, this is to be
expected because of the differences in methodology.
19
3.1.1. STIFFNESS MATRIX IMPLEMENTATION IN DYMORE
Typical beam property inputs include sectional properties such as axial stiffness,
bending stiffness, torsion stiffness and shear stiffness. Beam property definition can
found in the DYMORE manual, [10] but is included here for clarity.
@BEAM PROPERTY DEFINITION {
@BEAM PROPERTY NAME { BldPropName } {
@PROPERTY_DEFINITION_TYPE {SECTIONAL_PROPERTIES}
@COORDINATE_TYPE {ETA_COORDINATE}
@ETA COORDINATE{ η } {
@AXIAL STIFFNESS { S }
@BENDING STIFFNESSES { Ic22, Ic33, Ic23}
@TORSIONAL STIFFNESS { J }
@SHEARING STIFFNESSES { K22, K33, K23 }
@SHEAR CENTRE LOCATION { xk2, xk3 }
@MASS PER UNIT SPAN { m00 }
@MOMENTS OF INERTIA { m11, m22, m33 }
@CENTRE OF MASS LOCATION { xm2, xm3 }
}
}
}
These inputs define the blade properties and DYMORE uses this information to
generate the equivalent stiffness matrix. DYMORE performs all of its calculations with
the stiffness matrix and does not use these inputs directly. This format is intended to
simplify property definition for the user. When using this setup to define beam
properties, the user makes the assumption that there is no coupling between forces and
moment with the exception of any effects due to a shear center offset if the user defines
this as a non-zero value. In other words, all off diagonal terms are zero. For most
applications, this format for inputting beam properties is sufficient and is used most
often. In this study, the researcher investigated the effect of flap-bending torsion
20
coupling and had non-zero off diagonal terms. For this reason, the sectional properties
input format, shown above, is not sufficient.
DYMORE does allow the user to define the stiffness matrix directly, making it
possible for the user to define non-zero off diagonal elements. The inputs now take the
following form:
@BEAM_PROPERTY_NAME { BldPropName } {
@PROPERTY_DEFINITION_TYPE {6X6_MATRICES}
@COORDINATE_TYPE {ETA_COORDINATE}
@ETA_COORDINATE { η }{
@STIFFNESS_MATRIX { k1, …k21}
@MASS_PER_UNIT_SPAN { m00}
@MOMENTS_OF_INERTIA { m11, m22, m33 }
@CENTRE_OF_MASS_LOCATION { xm2, xm3 }
}
}
}
The 6 x 6 stiffness matrix is a symmetric matrix. Due to symmetry only 21 terms
are defined corresponding to the upper half of the stiffness matrix.
𝑭𝟏
𝑭𝟐
|𝑭 |
𝟑
=
𝑴𝟏
| |
𝑴𝟐
𝑴𝟑
[
𝒌𝟏 𝒌𝟐 𝒌𝟑 𝒌𝟒 𝒌𝟓 𝒌𝟔
∈𝟏
𝒌𝟕 𝒌𝟖 𝒌𝟗 𝒌𝟏𝟎 𝒌𝟏𝟏 𝜸𝟏𝟐
𝒌𝟏𝟐 𝒌𝟏𝟑 𝒌𝟏𝟒 𝒌𝟏𝟓 𝜸𝟏𝟑
𝒌𝟏𝟔 𝒌𝟏𝟕 𝒌𝟏𝟖 𝒌𝟏
𝒌𝟏𝟗 𝒌𝟐𝟎 𝒌𝟐
𝒌𝟐𝟏 ] [ 𝒌𝟑 ]
Eq. 3
Taking into account the sectional properties inputs and regenerating the stiffness
matrix, it is now defined as follows:
21
𝐹1
𝐹2
|𝐹 |
3
=
𝑀1
| |
𝑀2
𝑀3
𝑆
𝑘2
𝑘
𝐾22
𝑘3
𝑘4
𝑥𝑐3 𝑆
−𝑥𝑐2 𝑆
∈1
𝑘
𝑘
(−𝑥𝑘2 𝐾23 − 𝑥𝑘3 𝐾22 )
𝑘10
𝑘11
𝛾12
𝑘
𝑘
𝛾13
(𝑥𝑘2 𝐾23 + 𝑥𝑘3 𝐾23 )
𝑘14
𝑘15
2
𝑘
2
𝑘
𝑘1
𝑥𝑘2
𝐾33
+ 𝑥𝑘3
+ 2𝑥𝑘2 𝑥𝑘3 𝐾23
) 𝑘17
𝑘18
𝑘2
𝑐
2 ) (−𝐼 𝑐
(𝐼22
+ 𝑥𝑐3
23 − 𝑥𝑐2 𝑥𝑐3 𝑆)
[𝑘 ]
𝑐
2
( 𝐼33
+ 𝑥𝑐2
𝑆) ] 3
𝑘
−𝐾23
𝑘
𝐾33
(𝐽 +
[
Eq. 4
In order to ensure that the stiffness matrix was calculated and input correctly, a test
case was run to compare the frequency and damping predictions using the sectional
properties and 6 x 6 stiffness matrix inputs. The results of the comparison are plotted in
Figure 7 and Figure 8.
Baseline S76D Frequency
solid = Baseline Method; dash = Stiffness Matrix
10P
30
9P
8P
7P
6P
5P
1L
1F
2F
1T
2L
25
4P
Frequency (Hz)
20
3P
15
2P
10
1P
5
0
Nominal Nr = 293 RPM
0
50
100
150
200
250
300
Rotor Speed (RPM)
Figure 7: Frequency Prediction (Sectional Properties vs. Stiffness Matrix)
22
The dashed curves plotted in Figure 7 are the frequency predictions using the 6 x
6 stiffness matrix and the solid curves are the predictions using the sectional properties
input definition. As expected, the curves are identical indicating that the stiffness matrix
was calculated correctly.
Baseline S76D Damping Ratio
solid = Baseline Method; dash = Stiffness Matrix
1L
1F
2F
1T
2L
0.6
Damping Ratio
0.5
0.4
0.3
0.2
0.1
Nominal Nr = 293 RPM
0
0
50
100
150
200
250
300
Rotor Speed (RPM)
Figure 8: Rotor Speed Sweep Damping Predictions (Sectional Properties vs. Stiffness
Matrix)
For completeness, the damping prediction for a rotor speed sweep in hover at flat
pitch was generated using both beam property input methods. The dashed curves plotted
in Figure 8 are the damping prediction using the 6 x 6 stiffness matrix and the solid
curves are the predictions using the sectional properties. Both methods produce identical
predictions.
3.2. LEADING EDGE COUNTER WEIGHT (LECW) REMOVAL
23
For the next phase of this study, the researcher investigated the effects of
removing leading edge counter weight. To improve rotor stability and mitigate the onset
of flutter, led slugs are installed in the leading edge of the rotor blade. These led slugs
shift the CG towards the leading edge. Moving the CG forward ensures that the center
of gravity is forward of the aerodynamic center. If this is not the case, flutter will occur.
Figure 9: Airfoil Cross Section (LECW Location)
In order to model the removal of leading edge counter weight in DYMORE, the
blade properties must be modified. When counter weight is removed the weight of the
blade, center of mass and mass moments of inertia are affected. These are the properties
that require modification.
Each slug weighs approximately 0.11 lbs, is approximately 1.5 inches long and
they extend from radial station 120 to radial station 225. Removing all counter weight
from the leading edge of the rotor blade will result on a 6.9 lb. reduction in blade weight.
A graphical depiction of the approximate LECW locations is shown in Figure 10.
Figure 10: Rotor Blade Top View (LECW Location)
24
Modifying mass per unit length blade property inputs, in order to account for
removal of counter weight, is straightforward. By taking into account the mass of a
single slug and its known length, its mass per unit length can easily be calculated.
Slug mass per length = slug mass / slug length
With the slug mass per length known, this value can then be subtracted directly
from the properties that define the blade mass per unit length starting at radial station
120 and ending at radial station 225. This accounts for the change in weight of the rotor
blade as a result of removing counter weight.
The change in center of mass location as a result of removing counter weight
must also be calculated and incorporated into the modified blade properties. The
relationship between the CG of the blade and the CG of the led slugs is as follows:
𝐦𝐛 ∗ 𝐱 𝐛 + 𝐦𝐬 ∗ 𝐱 𝐬 = 𝐦𝐭 ∗ 𝐱 𝐭
Eq. 5
Where:
mb = mass of blade
xb = CG of blade
ms = mass of slug
xs = CG of slug
mt = mass of blade and slugs
xt = CG of blade with slugs
Rearranging the equation and solving for xb :
𝒙𝒃 =
(𝒎𝒃 +𝒎𝒔 )∗𝒙𝒕 −𝒎𝒔 ∗𝒙𝒔
𝒎𝒃
Eq. 6
The CG of the blade without the LECW is now known and can be incorporated
into the blade property input files for the appropriate radial stations.
The change in mass moment of inertia is the last of the properties that is affected
by the removal of counter weight. The change is small and was assumed to be
negligible. For this reason, the change in mass moment of inertia as a result of removing
counter weight was not taken into account.
25
S76D Frequency (LECW Removed)
solid = LECW Removed; dash = Baseline
10P
30
8P
7P
6P
5P
1L
1F
2F
1T
2L
25
9P
Note: 6.9lb of LECW Removed
4P
Frequency (Hz)
20
3P
15
2P
10
1P
5
0
0
50
100
150
200
Nominal Nr = 293 RPM
250
300
Rotor Speed (RPM)
Figure 11: Frequencies with LECW Removed
Plotted in Figure 11 are the predicted frequencies for an S-76D blade with no
leading edge counter weight. The solid curves are the predictions with no counter
weight and the dashed curves are the frequency predictions for the baseline blade. The
blue curve is the first rigid lag mode, the green curve is the first rigid flap mode, the red
curve is the first elastic flap mode, the cyan curve is the first torsion mode and the purple
curve is the first elastic lag mode.
By removing counter weight, the torsion mode was expected to decrease and
couple with the first elastic flap mode. This would therefore increase the likelihood that
the blade would become unstable and start to flutter. As demonstrated in this plot, flutter
did not occur. In fact, the opposite took place. The torsion mode actually increased in
frequency creating more separation between it and the first elastic flap mode. After
further investigation, it was discovered that first torsion mode and the first elastic lag
26
mode were interacting with one another. When the counter weights were removed, those
modes were decoupled, increasing the frequency of both modes.
S76D Damping Ratio (LECW Removed)
solid = LECW Removed; dash = Baseline
0.8
1L
1F
2F
1T
2L
0.7
Note: 6.9lb of LECW Removed
Damping Ratio
0.6
0.5
0.4
0.3
0.2
0.1
Nominal Nr = 293 RPM
0
0
50
100
150
200
250
300
Rotor Speed (RPM)
Figure 12: Damping Ratio with LECW Removed
Plotted in
27
S76D Damping Ratio (LECW Removed)
solid = LECW Removed; dash = Baseline
0.8
1L
1F
2F
1T
2L
0.7
Note: 6.9lb of LECW Removed
Damping Ratio
0.6
0.5
0.4
0.3
0.2
0.1
Nominal Nr = 293 RPM
0
0
50
100
150
200
250
300
Rotor Speed (RPM)
Figure 12 are the damping predictions for a rotor speed sweep in hover at flat
pitch. Again, the solid curves are predictions with no counter weight and the dashed
curves are the predictions for the baseline blade. The estimated damping ratio is plotted
for the first 5 blade modes. The blue curve is the first rigid lag mode, the green curve is
the first rigid flap mode, the red curve is the first elastic flap mode, the cyan curve is the
first torsion mode and the purple curve is the first elastic lag mode.
After close examination of the Southwell diagram and understanding that
removal of counter weight improves modal separation for the S-76D blade
configuration, it is expected there be an increase in the damping for the first elastic flap
and first torsion mode. In
28
S76D Damping Ratio (LECW Removed)
solid = LECW Removed; dash = Baseline
0.8
1L
1F
2F
1T
2L
0.7
Note: 6.9lb of LECW Removed
Damping Ratio
0.6
0.5
0.4
0.3
0.2
0.1
Nominal Nr = 293 RPM
0
0
50
100
150
200
250
300
Rotor Speed (RPM)
Figure 12, this is not the case. Also note that not only did the damping increase
for first elastic flap and first torsion mode, but is predicted to increase for all of the
modes.
29
S76D Damping Ratio (LECW Removed)
solid = LECW Removed; dash = Baseline
0.6
1L
1F
2F
1T
2L
0.5
Note: 6.9lb of LECW Removed
Damping Ratio
0.4
0.3
0.2
0.1
0
0
2
4
6
8
10
Collective (deg)
Figure 13: Collective Sweep Damping Ration with LECW Removed
Plotted in
S76D Damping Ratio (LECW Removed)
solid = LECW Removed; dash = Baseline
0.6
1L
1F
2F
1T
2L
0.5
Note: 6.9lb of LECW Removed
Damping Ratio
0.4
0.3
0.2
0.1
0
0
2
4
6
Collective (deg)
30
8
10
Figure 13 are the damping predictions for a collective sweep in hover operating
at 100% NR. Again, the solid curves are the predictions with no counter weight and the
dashed curves are the predictions for the baseline S-76D blade. The estimated damping
ratio is plotted for the first 5 blade modes. The blue curve is the first rigid lag mode, the
green curve is the first rigid flap mode, the red curve is the first elastic flap mode, the
cyan curve is the first torsion mode and the purple curve is the first elastic lag mode.
As expected, the predictions are consistent with what we observed for the rotor
speed sweep. The damping ratio for all blade modes is predicted to be higher than the
unmodified S-76D blade. It is also interesting to note that at high thrust (10 degrees of
collective) the damping is predicted to increase for the first elastic flap mode as opposed
to the baseline case where the damping remained relatively constant throughout the
collective sweep.
3.3. FLAP WEIGHT ADDITION
Alternative methods for exciting flutter were investigated after discovering that
removal of LECW did not shift the blade CG far enough aft for instability to occur
during a rotor speed sweep or collective sweep in hover. The implementation of active
devices such as active slats and flaps are of particular interest to the rotorcraft industry in
order to delay the onset of stall and increase rotor performance. The disadvantage of
these devices is that they add weight and in the case of active flaps, they add weight in a
disadvantage location. To compensate for the addition of weight associated with active
components necessary for active flaps; parasitic weight is often added forward of the
feathering axis in order to regain stability. As a result of the substantial increase in
weight, active flaps have a difficult time buying their way onto aircraft. If there was a
method by which composite coupling could be used to define a weight neutral active
flap solution, then this technology becomes much more attractive.
An approach similar to the LECW remove case defined in section 3.2 was taken
in order to model the effect of installing components necessary for an active flap.
Leading edge counter weights were removed from the same locations defined in section
3.2 and then weight was added aft of the feathering axis at the approximate location
active components would be installed for an active flap.
31
Figure 14: Layout of LECW Removal and Flap Weight Addition
The flap weight was modeled as a five (5) lbs. increase starting a radial station
215 and ending at radial station 235. The flap weight acts midway between the
feathering axis and the trailing edge. As was done for the LECW removal case, the mass
distribution properties and CG distribution properties were modified per the equations
defined in section 3.2. The change in mass moment of inertia was again assumed to be
negligible.
S76D Frequency (LECW Removed Plus Flap Weight)
solid = LECW Removed Plus Flap Weight; dash = baseline
10P
30
1L
1F
2F
1T
2L
25
9P
8P
7P
6P
5P
Note: 6.9lb LECW Removed
5.0lb Flap Weight Added
4P
Frequency (Hz)
20
3P
15
2P
10
1P
5
0
Nominal Nr = 293 RPM
0
50
100
150
200
Rotor Speed (RPM)
32
250
300
Figure 15: Frequencies with LECW Removed Plus Flap Weight
Plotted in Figure 15 is the Southwell diagram comparing the frequencies between
the baseline S-76D blade and the modified blade with leading edge counter weight
removed and weight added to model components necessary for an active flap.
DYMORE predicts that the first elastics flap, first torsion and first elastic lag mode will
all increase in frequency relative to the baseline blade. Although the first torsion mode
did not decrease relative to the baseline as expected, the coupling between the first
elastic flap mode and the first torsion mode has increased making this blade more
susceptible to flutter.
S76D Damping Ratio (LECW Removed Plus Flap Weight)
solid = LECW Removed Plus Flap Weight; dash = Baseline
0.35
1L
2F
1T
2L
0.3
Note: 6.9lb LECW Removed
5.0lb Flap Weight Added
Damping Ratio
0.25
0.2
0.15
0.1
0.05
0
0
50
100
150
200
Nominal Nr = 293 RPM
250
300
Rotor Speed (RPM)
Figure 16: Rotor Sweep Damping Ration with LECW Removed Plus Flap Weight
33
Plotted in Figure 16 are the damping ratio predictions for a rotor speed sweep in
hover. The dashed curves define the predictions for the baseline S-76D blade and the
solid curves define the predictions for the modified blade with LECW removed and
weight added to model components necessary for an active flap. In general, the damping
predictions appear very similar with the exception of the first elastic flap mode. The
damping ratio for the first elastic flap mode at 100% Nr is estimated to be 20.6% for the
baseline blade. At 100% Nr with leading edge counter weight removed and weight
added for active flap components, the first elastic flap is predicted to have 15.6%
damping.
S76D Damping Ratio (LECW Removed Plus Flap Weight)
solid = LECW Removed Plus Flap Weight; dash = Baseline
0.3
2F
1T
Note: 6.9 lb LECW Removed
5.0 lb Flap Weight Added
0.25
Damping Ratio
0.2
0.15
0.1
0.05
0
0
2
4
6
8
10
Collective (deg)
Figure 17: Collective Sweep Damping Ration with LECW Removed Plus Flap Weight
Plotted in Figure 17 are the damping ration predictions for a collective sweep in
hover. The dashed curves represent the baseline S-76D blade predictions and the solid
curves represent the predictions for the modified blade with LECW removed and weight
34
added to model components necessary for an active flap. Only two modes are of
particular interest and include the first elastic flap and first torsion mode.
In the previous figure we noted that the first elastic flap mode exhibited a 24%
decrease in damping at nominal RPM relative to the baseline blade. This dramatic
decrease in damping shows signs of flutter although the predictions do not indicate
instability with all modes predicted to be positively damped. As the collective is
increased and the blades are more heavily loaded, the first elastic flap mode is predicted
to decrease very rapidly and go unstable at 12 degrees of impressed pitch.
3.4. EFFECTS OF FLAP-BENDING TORSION COUPLING
In the previous case it was discovered that by removing the leading edge count
weight and adding weight to model active flap components, the S-76D blade will go
unstable at high collective inputs. This type of instability is known as flutter and occurs
when the first elastic flap mode and first torsion mode interact with one another. As the
blade is aerodynamically loaded it will flap up elastically and pitch nose up. When this
occurs, the aerodynamic loads increase causing increasingly larger deflections until the
blade stalls. At that point the blade then starts to flap down and pitch nose down until it
again stalls. This oscillation will persists until the blade fails or the forcing function is
removed.
If it were possible for the blade to flap up elastically and internal stresses caused
it to twist nose down, it is hypothesized that the onset of flutter can be delayed. This
type of flap up twist down behavior can be achieved through tailored composite
coupling. Antisymmetric crossply laminates can be used to achieve this type of
coupling. Antisymmetric crossply laminates consist of 0° and 90° plies arranged in such
a way that for every 0° ply at a distance z from the midplane there is a 90° ply of the
same material and thickness at a distance -z from the midplane.
For this study, an idealized flap-bending torsion coupling was assumed. The
baseline S-76D stiffness matrix defined the starting point for this case. The next step
was to define the required amount of flap-bending torsion coupling. The work
performed by Jinsong Bao [1], was consulted in order to determine a feasible amount of
cross coupling. The non-dimension stiffness properties of composite tailored blade
35
(Table 3.9) defined the flap stiffness, torsion stiffness and coupling stiffness of the test
specimen used in the study performed by Bao. These non-dimensional stiffness
properties indicated that the coupling stiffness was equivalent to 30% of the flatwise
stiffness. Taking this into account, the stiffness matrix for the flap-bending torsion
coupling cases performed in this study was defined as follows:
𝐹1
𝐹2
|𝐹 |
3
=
𝑀1
| |
𝑀2
𝑀3
𝑆
0
𝑘
𝐾22
0
0
0
−𝑥𝑐2 𝑆
∈1
0
0
0
0
𝛾12
𝑘
𝐾33
0
0
0
𝛾13
2
𝑘
2
𝑘
𝑘1
(𝐽 + 𝑥𝑘2 𝐾33 + 𝑥𝑘3 + 2𝑥𝑘2 𝑥𝑘3 𝐾23 ) 𝑘17
0
𝑘2
𝑐
2 )
(𝐼22
+ 𝑥𝑐3
0
[
𝑘 ]
𝑐
2
( 𝐼33
+ 𝑥𝑐2
𝑆)] 3
[
𝑘
Where: 𝑘17 = −0.3 ∗ 𝐾22
S76D Frequency (LECW Removed Plus Flap Weight)
solid = 30% Coupling; dash = No Coupling
10P 9P
30
1L
1F
2F
1T
2L
25
8P
7P
6P
5P
Note: 6.9 lb LECW Removed
5.0 lb Flap Weight Added
4P
Frequency (Hz)
20
3P
15
2P
10
1P
5
0
0
50
100
Nominal Nr = 293 RPM
200
250
300
150
Rotor Speed (RPM)
Figure 18: Frequencies with 30% Flap-Bending Torsion Coupling
36
Eq. 7
Plotted in Figure 18 are the frequency predictions for the S-76D blade with 30% of
flap-bending torsion coupling. These predictions are shown by the solid curves and the
dashed curves are the frequency predictions with no coupling. The two cases predict
frequencies that are very similar for most modes with the exception of the first torsion
mode. With 30% coupling, the first torsion mode is predicted to decrease in frequency
relative to the case with no coupling. The first elastic flap and first torsion mode were
expected to be closer in frequency when modeling flap-bending torsion coupling because
these two modes are now coupled structurally. This may seem counter intuitive because
in most cases effort is focused on increasing the separation between these modes in order
to avoid flutter. In this case, we are trying to couple these modes advantageously in
order to avoid flutter as opposed to arbitrarily increasing the torsion stiffness, for
example, in order to increase the separation between the first elastic flap and first torsion
mode.
S76D Damping Ratio (LECW Removed Plus Flap Weight)
solid = 30% Coupling; dash = No Coupling
0.25
2F
1T
Note: 6.9 lb LECW Removed
5.0 lb Flap Weight Added
Damping Ratio
0.2
0.15
0.1
0.05
Nominal Nr = 293 RPM
0
0
50
100
150
200
250
300
Rotor Speed (RPM)
Figure 19: Rotor Speed Sweep Damping Ratio with 30% Coupling
Plotted in Figure 19 are the damping ratio predictions for the first elastic flap
mode with 30% coupling and with no coupling. The solid curve defines the predictions
37
with coupling and the dashed curve defines the predictions without coupling. At
nominal rotor speed, (100% Nr) the damping ration of the first elastic flap mode with no
coupling is predicted to be 15.5%. With 30% coupling, the first elastic flap mode is
predicted to have 18.6% damping. This equates to a 16.6% increase in damping. The
incorporation of 30% coupling was not enough to regain the baseline damping (20.6%),
but shows a very clearly ability to improve the stability margin.
S76D Damping Ratio (LECW Removed Plus Flap Weight)
solid = 30% Coupling; dash = No Coupling
0.3
2F
1T
Note: 6.9 lb LECW Removed
5.0 lb Flap Weight Added
0.25
Damping Ratio
0.2
0.15
0.1
0.05
0
0
2
4
6
8
10
12
Collective (deg)
Figure 20: Collective Sweep Damping Ratio with 30% Coupling
Plotted in Figure 20 are the damping predictions for a collective sweep in hover.
The solid curve is the damping predictions with 30% coupling and the dashed curve is
the damping predictions without coupling for the first elastic flap mode. With flapbending torsion coupling incorporated into the structural properties, the stability
boundary was increased as can be seen by the solid curve being shifted above the dashed
curve. Most notably, at 12 degrees of impressed pitch, the first elastic flap mode is no
38
longer unstable with a damping ratio 5.5% when 30% of flap-bending torsion coupling is
incorporated into the blade properties.
39
4. CONCLUSIONS AND RECOMMENDATIONS
This study was segmented into three phases consisting of model validation, the effect
of weight removal and the effect of flap-bending torsion coupling. In order to validate
the S-76D DYMORE model, RCAS frequency and damping predictions were used as a
basis of comparison. Although the frequency predictions were not identical between the
two codes, they were similar with the largest differences observed for the high order
elastic modes. These differences were predominantly attributed to blade discretization.
The damping predictions showed similar trends and magnitudes with noticeable
differences in the absolute value. Damping predictions were not expected to be identical
because of dissimilar methodology for predicting modal damping. Frequency and
damping predictions were consistent between both codes indicating that the DYMORE
model was sufficient for the planned parametric studies.
During phase two of this study, parasitic weight was removed from the leading
edge of the airfoil. Removal of this weight (i.e. LECW) was expected to excite cause
flutter. It was determine that slug removal from the S-76D blade was not destabilizing
in hover. It is possible that while in high speed forward flight flutter may be excited and
this should be investigated in future work. However, due to the frequency separation
between the first elastic flap and first torsion mode, flutter is not expected to occur.
Weight was then added aft of the feathering axis after discovering that LECW
removal was not adequate for exciting flutter in the S-76D blade. This additional weight
models the components necessary for installing an active flap. The added benefit of an
active flap is often over shadowed by the accompanying increase in weight. Combining
LECW removal with the incorporation of an active flap, a weight neutral solution can be
achieved. As expected, this new weight distribution caused the S-76D blade to flutter in
hover at twelve degrees of impressed pitch.
Flap-bending/torsion coupling was incorporated into the blade properties. The
off diagonal stiffness matrix term for flap/torsion coupling was defined such that a flap
up twist down phenomenon would occur. It was determine that uniformly distributed
coupling with a magnitude equivalent to 30% of the flap bending stiffness was sufficient
to mitigate flutter. A parametric study was also performed in order to understand the
benefits of increased flap-bending/torsion coupling.
40
S76D Damping Ratio (LECW Removed W/Flap Weight and Flap Twist Coupling)
0.3
2F - No Coupling
2F - 20% Coupling
2F - 30% Coupling
2F - 40% Couping
0.25
Note: 6.9 lb LECW Removed
5.0 lb Flap Weight Added
Damping Ratio
0.2
0.15
0.1
0.05
Nominal Nr = 293 RPM
0
0
50
100
150
200
250
300
Rotor Speed (RPM)
Figure 21: Parametric Results of Flap Bending Torsion Coupling (Rotor Speed Sweep)
S76D Damping Ratio (LECW Removed W/Flap Weight and Flap Twist Coupling)
0.4
2F - No Coupling
2F - 20% Coupling
2F - 30% Coupling
2F - 40% Coupling
0.35
Note: 6.9 lb LECW Removed
5.0 lb Flap Weight Added
Damping Ratio
0.3
0.25
0.2
0.15
0.1
0.05
0
0
2
4
6
8
10
12
Collective (deg)
Figure 22: Parametric Results of Increased Flap-Bending/Torsion Coupling (Collective
Sweep)
41
As shown in Figure 22 and
S76D Damping Ratio (LECW Removed W/Flap Weight and Flap Twist Coupling)
0.3
2F - No Coupling
2F - 20% Coupling
2F - 30% Coupling
2F - 40% Couping
0.25
Note: 6.9 lb LECW Removed
5.0 lb Flap Weight Added
Damping Ratio
0.2
0.15
0.1
0.05
Nominal Nr = 293 RPM
0
0
50
100
150
200
250
300
Rotor Speed (RPM)
Figure 21, the damping ration of the first elastic flap mode increases as the amount
of flap-bending/torsion coupling increases. The increase in damping is approximately
linear and is more effective as blade loading and deflection increase. Flapbending/torsion stiffness equivalent to 30% of the flap bending stiffness is the upper
range of the coupling that can be achieved with today’s composites. This amount of
coupling is sufficient to mitigate flutter if a weight neutral solution for an active flap
were incorporated into the S-76D blade design.
42
5. OPPORTUNITIES FOR FUTURE WORK
Additional opportunities exist for continued development of rotor blades with flapbending/torsion coupling. In this study, simulations were run for rotor speed sweeps and
collective sweeps in hover. To further vet this concept additional work should be done
to understand how these blades behave in high-speed forward flight. Wind tunnel
testing of a scaled model should be conducted to validate the simulation results. Also, in
this study the flap-bending/torsion coupling stiffness was assumed to be uniform along
the span if the blade. Additional work can be done to optimize blade design using
localized regions of coupling to achieve the same improvements in damping ration.
43
6. APPENDIX A: FREQUENCY AND DAMPING PREDICTIONS
Baseline S76D Frequency
solid = vacuum; dash = air
10P
30
9P
8P
7P
6P
5P
1L
1F
2F
1T
2L
25
4P
Frequency (Hz)
20
3P
15
2P
10
1P
5
0
0
50
100
150
Nominal Nr = 293 RPM
200
250
300
Rotor Speed (RPM)
Figure 23: Baseline S-76D Southwell Diagram
Baseline S76D Damping Ratio
solid = vacuum; dash = air
1L
1F
2F
1T
2L
0.6
Damping Ratio
0.5
0.4
0.3
0.2
0.1
Nominal Nr = 293 RPM
0
0
50
100
150
200
250
Rotor Speed (RPM)
Figure 24: Baseline S-76D Rotor Speed Sweep
44
300
Baseline S76D Frequency
solid = vacuum; dash = air
30
1L
1F
2F
1T
2L
Frequency (Hz)
25
20
15
10
5
0
0
2
4
6
8
10
8
10
Collective (deg)
Baseline S76D Damping Ratio
solid = vacuum; dash = air
0.4
Damping Ratio
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
0
2
4
6
Collective (deg)
Figure 25: Baseline S-76D Collective Sweep
45
S76D Frequency (LECW Removed)
solid = vacuum; dash = air
10P
30
9P
8P
7P
6P
5P
1L
1F
2F
1T
2L
25
4P
Frequency (Hz)
20
3P
15
2P
10
1P
5
0
0
50
100
150
200
Nominal Nr = 293 RPM
250
300
Rotor Speed (RPM)
Figure 26: S-76D Southwell Diagram with LECW Removed
S76D Damping Ratio (LECW Removed)
solid = vacuum; dash = air
0.8
1L
1F
2F
1T
2L
0.7
Damping Ratio
0.6
0.5
0.4
0.3
0.2
0.1
Nominal Nr = 293 RPM
0
0
50
100
150
200
250
300
Rotor Speed (RPM)
Figure 27: S-76D Rotor Speed Sweep with LECW Removed
46
S76D Frequency (LECW Removed)
solid = vacuum; dash = air
30
1L
1F
2F
1T
2L
Frequency (Hz)
25
20
15
10
5
0
0
2
4
6
8
10
Collective (deg)
S76D Damping Ratio (LECW Removed)
solid = vacuum; dash = air
0.6
Damping Ratio
0.5
0.4
0.3
0.2
0.1
0
0
2
4
6
8
Collective (deg)
Figure 28: S-76D Collective Sweep with LECW Removed
47
10
S76D Frequency (LECW Removed Plus Flap Weight)
solid = vacuum; dash = air
10P
30
9P
8P
7P
6P
1L
1F
2F
1T
2L
25
5P
4P
Frequency (Hz)
20
3P
15
2P
10
1P
5
0
0
50
100
150
Nominal Nr = 293 RPM
250
300
200
Rotor Speed (RPM)
Figure 29: S-76D Southwell Diagram with LECW Removed Plus Flap Weight
S76D Damping Ratio (LECW Removed Plus Flap Weight)
solid = vacuum; dash = air
1
1L
1F
2F
1T
2L
0.9
0.8
Damping Ratio
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
50
100
150
200
Nominal Nr = 293 RPM
250
300
Rotor Speed (RPM)
Figure 30: S-76D Rotor Speed Sweep with LECW Removed Plus Flap Weight
48
S76D Frequency (LECW Removed Plus Flap Weight)
solid = vacuum; dash = air
30
1L
1F
2F
1T
2L
Frequency (Hz)
25
20
15
10
5
0
0
2
4
6
8
10
Collective (deg)
S76D Damping Ratio (LECW Removed Plus Flap Weight)
solid = vacuum; dash = air
0.3
Damping Ratio
0.25
0.2
0.15
0.1
0.05
0
0
2
4
6
8
Collective (deg)
Figure 31: S-76D Collective Sweep with LECW Removed Plus Flap Weight
49
10
S76D Frequency (LECW Removed Plus Flap Weight and 30% CC)
solid = vacuum; dash = air
10P 9P
30
8P
7P
6P
5P
1L
1F
2F
1T
2L
25
4P
Frequency (Hz)
20
3P
15
2P
10
1P
5
0
0
50
100
150
Nominal Nr = 293 RPM
200
250
300
Rotor Speed (RPM)
Figure 32: S-76D Southwell Diagram with LECW Removed Plus Flap Weight and 30%
Coupling
S76D Damping Ratio (LECW Removed Plus Flap Weight and 30% CC)
solid = vacuum; dash = air
0.9
1L
1F
2F
1T
2L
0.8
0.7
Damping Ratio
0.6
0.5
0.4
0.3
0.2
0.1
Nominal Nr = 293 RPM
0
0
50
100
150
200
250
300
Rotor Speed (RPM)
Figure 33: S-76D Rotor Speed Sweep with LECW Removed Plus Flap Weight and 30%
Coupling
50
S76D Frequency (LECW Removed Plus Flap Weight and 30% Coupling)
solid = vacuum; dash = air
30
1L
1F
2F
1T
2L
Frequency (Hz)
25
20
15
10
5
0
0
2
4
6
8
10
Collective (deg)
S76D Damping Ratio (LECW Removed Plus Flap Weight and 30% Coupling)
solid = vacuum; dash = air
0.3
Damping Ratio
0.25
0.2
0.15
0.1
0.05
0
0
2
4
6
8
10
Collective (deg)
Figure 34: S-76D Collective Sweep with LECW Removed Plus Flap Weight and 30%
Coupling
51
7. REFERENCES
[1]
Mishra, A., Anathan, S., Baeder, J., Opoku, D., Wake, B. and Lin, R., “Coupled
CFD/CSD Prediction of the Effect of Leading Edge Slat on Rotor Performance,”
Proceedings of the 65th Annual Forum and Technology Display of the American
Helicopter Society International, Dallas, TX, May 27-29, 2009.
[2]
Bao, J., Nagaraj, V.T., and Chopra, I., “Composite Coupled Rotor Program,”
Alfred Gessow Rotorcraft Center, Department of Aerospace Engineering,
University of Maryland.
[3]
Jung, S. N., Nagaraj, V. T., and Chopra, I., “Assessment of Composite Rotor
Blade Modeling Techniques,” Journal of the American Helicopter Society,
Vol.44, No.3, July 1999, pp.188-205.
[4]
Hong, C. H., and Chopra, I.,“Aeroelastic Stability Analysis of a Composite Rotor
Blade,” Journal of the American Helicopter Society, Vol.30, No.2, April 1985,
pp.57-67.
[5]
Nixon, M. W., “Aeroelastic Response and Stability of Tiltrotors with ElasticallyCoupled Composite Rotor Blades,” Ph.D. Dissertation, Department of Aerospace
Engineering, University of Maryland, 1993.
[6]
Bauchau, O. A., and Hong, C. H., “Finite Element Approach to Rotor Blade
Modeling,” Journal of the American Helicopter Society, Vol.32, No.1, January
1987, pp.60-67.
[7]
Chandra, R., and Chopra, I., “Structural Response of Composite Beams and
Blades with Elastic Couplings,” Composites Engineering, Vol.2, No. 5-7, 1992,
pp.347-374.
[8]
Nixon, M.W., Piatak, D. J., Corso, L. M., and Popelka, D. A., “Aeroelastic
Tailoring for Stability Augmentation and Performance Enhancements of Tiltrotor
Aircraft,” Journal of the American Helicopter Society, Vol.45, No.4, October
2000, pp. 270-279.
[9]
Tracy, A. L., “Aeromechanical Stability Investigation of Elastically Coupled
Composite Helicopter Rotors,” Ph.D. Dissertation, Department of Aerospace
Engineering, University of Maryland, 1996.
52
[10]
Smith, E. C., “Aeroelastic Response and Aeromechanical Stability of Helicopters
with Elastically Coupled Composite Helicopter Rotor Blades,” Ph.D.
Dissertation, Department of Aerospace Engineering, University of Maryland,
1992.
[11]
Bauchau, O. A., “DYMORE User’s Manual,” Atlanta, GA, August 20, 2007.
[12]
Makinen, S. M., “Applying Dynamic Wake Models to Large Swirl Velocities for
Optimal Propellers,” Sever Institute of Technology, Department of Mechanical
and Aerospace Engineering, Washington University, May 2005.
[13]
Kufeld, R. M. and Johnson, W., “The Effects of Control System Stiffness Models
on the Dynamic Stall Behavior of a Helicopter,” Proceedings of the 54th Annual
Forum, Washington, DC, May 20-22, 1998.
[14]
Daniel, I. M. and Ishai, O., Engineering Mechanics of Composite Materials, 2nd
ed. Oxford, New York: Oxford University Press Inc., 2006.
53