AP Physics I - Ms. Wilson ()
advertisement
")
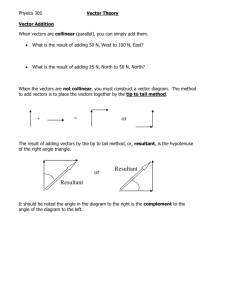
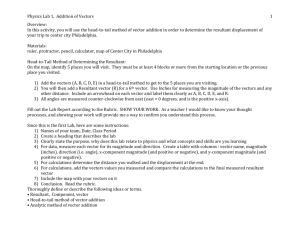
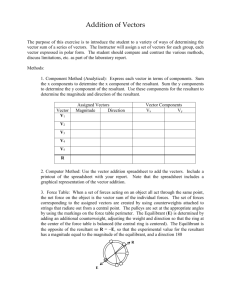
AP Physics 1 Summer Work Welcome to Physics 1! This course will challenge, frustrate, entertain, enlighten, and aggravate you (often all during the same class period). In this course you find out how stuff works and why it works the way it does. We will study Mechanics in the fall semester and Rotational Motion, Waves and Sound, and Electrostatics in the spring semester. Although it is a course that requires dedication and effort, we do try to have fun and I hope you enjoy the journey. The summer work consists of three activities: 1. Complete the packet of assignments. Show all work necessary to complete each problem. Work the problems in the order they are in the packet. Be clear in your solutions and either highlight or box your final answers. 2. Read The Physics of Superheroes by James Kakalios and write a 2-4 page paper on what you enjoyed about the book, what you learned, and what you would like to know more about. You will turn this paper in on the first day of class. 3. You will also need to create a Quick Reference Pages document for Chapter 2 of your textbook. I am attaching the bare bones copy and a sample copy so you can see what a completed one is supposed to look like. You will take my copy and type in the correct information (or neatly write it in) to create a summary of the key ideas of the chapter. When answering these questions and problems, I am more interested in where you are now, not if you can hunt down the correct answers. Please note that the work is due on the first full day of class and it will count as a 100 point test grade and as your ticket to the course (meaning if you don’t do the summer work, you may be dropped from the course). If you have questions or need help, please email me at wilsonj@rcschools.net. I will respond within 3 days. I will also let you know when I am at school for help sessions. Have a wonderful summer and I look forward to working with you this fall. Vectors vs. Scalars Scalars are quantities that are fully described by a magnitude (numerical value) alone. o When we apply a sign to a scalar it means the quantity is gained or lost: A negative scalar represents a quantity being taken out of the system. A positive scalar represents a quantity being added to a system. A positive scalar is greater than a negative scalar, due to the fact that one is added and the other is taken away. o There are various examples of scalars that are studied in physics. Time (t, seconds; s) Mass (m, kilograms; kg) Length (L, meters; m) Distance (d, meters; m) Speed (s, meters per second; m/s) Energy (E, KE, GPE, EPE, Joules; J) Vectors are quantities that are fully described by both a magnitude and a direction. o Vectors can be positive or negative A negative sign on a vector just represent the direction it is going. • Negative directions include Left, Down, South, West. • Positive directions include: Right, Up, North, East. To determine which one is greater, we look at the value not the sign. o Some examples of vectors are: Displacement (∆x, meters; m) Velocity (v, meters per second; m/s) Acceleration (a, meters per second squared; m/s2) Force (F, Newton; N) Momentum (p, kilograms meters per second; kg m/s) Vectors are the key to understanding quantities in 2D. X axis. The x-axis only has motions to the left (west) or to the right (east). (positive West (negative vector) Y axis. The y-axis only has motions up (north) or down North (positive vector) South (negative vector) Vectors at angles are made of both x- and y-components Q1 Q2 Q3 Q4 These are the directions that a vector can move. If you match them with a quadrant on the X, Y coordinate system, you can determine its components. For example the first vector above would be in the 1st Quadrant because both of its components are positive. There are two ways to add vectors. One is using the head to tail method. The head is the location of the arrow, the tail is the starting location of the vector. So in the example below, the head is on the right side of the first vector and the tail is on the left side of the first vector. Ex: or: + + = = = = After you connect the vectors, the resultant vector starts at the tail of the first vector and ends at the head of the second vector. Either way you set them up, you get the same resultant vector. Solve the following: + + = = + + = = Another way to add vectors is using their mathematical components. Vectors have numbers that can be found using a coordinate system. For example a vector with coordinates (0, 0) is at the origin. This vector doesn’t have an x or a y component and thus is just a dot at the origin. The first number on the coordinate is the x-component, the second number is the y-component <x, y>. 1 3 2 1) The head of the vector is three spots to the right and two spots up. Both components are positive. Call this <3, 2> or vector 1. 2) The head of this vector is two spots to the left and no spots up or down. Call this vector 2 or <-2, 0>. 3) The head of this vector is three spots to the left and three spots down. Call this vector 3 or <-3, -3>. To add vectors using coordinates, all you have to do is add the like components. Ex. V1 + V2 (3, 2) + (-2, 0) = (3+-2), (2+0) = (1, 2) Add like terms together V1 + V3 (3, 2) + (-3, -3) = (3+-3) + (2+-3) = (0, -1) x’s to x’s and y’s to y’s Find the coordinates, add the following vectors & draw the resultant vector, mathematically. 1 4 2 3 V1 + V2 = (2, 4) + (-2, 1) = (2+-2, 4+1) = (0, 5) V1 + V4 = V2 + V3 = V1 + V3 = V2 + V4 = V3 + V4 = As you have noticed vectors at angles have both x- and y-components. As you can see at above the components of a vector at an angle forms a right triangle. A right triangle has one angle equal 90o. The 90o is located where the horizontal line (x-axis) is perpendicular to the vertical line (y-axis). By using geometry, the sum of the angles inside any triangle equals 180o. We often use Greek letter theta (Ө) for angles. So, in a triangle, Ө1 + Ө2 + Ө3 = 180o. For right triangles we have Ө1 + Ө2 + 90o = 180o To find a missing angle on a right triangle, we just solve for it. Ө1 + Ө2 = 90o Find the Missing angle. 38o 55o 87o Ө Ө Ө θ = ________ θ = ________ 13o o 20 θ = ________ 70o Ө Ө θ = ________ Ө θ = ________ θ = ________ We can also measure the length of each vector, but using a different technique. The side lengths can be calculated using the Pythagorean Theorem. Pythagoras stated that the horizontal length squared, (a), plus the vertical length squared, (b), equal the hypotenuse length squared, (c). Remember that the length of the hypotenuse is the magnitude of your vector as well as the longest side length in the triangle. The Pythagorean Theorem is given below. 2 2 2 a +b =c The reason for the hypotenuse being the largest side of a right triangle is because it is the opposite side from the largest angle; 90o. Angles affect the length of a right triangle. Find the missing Length by using the Pythagorean Theorem. 9 5 Length =_______ 2 6 3 11 Length = _______ Length = _______ 6 11 9 7 4 2 Length = _______ Length = _______ Length = _______ *** Note that degrees (angles) and numbers are two different sets of measurements. You CANNOT add different measurements. There must be a relationship!!! This is when the Trigonometric Functions come into place. The job of the Trig Functions is to convert angles into numbers or numbers into angles. This is the bridge between the sum of the angles and Pythagorean’s Theorem. The following table shows the Trig function for various angles: If you take a look at the take, we can figure out the values of some common angles. Ex: Sin 30o = ½ = 0.5, this process takes an angle as the input and outputs the ratio of the sides which is a number. 30o into 0.5. Notice that sine and cosine are inverses of each one another. This relationship depends on the length of the sides of a right triangle (a & b not c). Determine the following numerical values: cos 37o = cos 60o = cos 90o = cos 0o = sin 37o = sin 60o = sin 90o = sin 0o = tan 37o = tan 60o = tan 90o = tan 0o = As you noticed, the job of the trig functions is to turn angles into numbers. If you can turn angles into numbers, there must be a way to do the inverse operation which turns numbers into angles. This is where the inverse of the trig functions come into play. Each trig function has an inverse value. Sin Sin-1 Cosine Cos-1 Tan Tan-1 These are also written as arcsin, arcos, and arctan. We use the table, but this time we work backwards. 3 Ex. Sin-1(0.6) = 37o. This is because 0.6 = . 5 1. 2. 3. You look at the trig function. See which value equals the number you are trying to convert. Choose the correct angle. Determine the following angles: sin-1 (0.8) = sin-1 (0.5) = sin-1 (0) = cos-1 (0.8) = tan-1 (0.75) = cos-1 (0.85) = tan-1 (1) = cos-1 (0) = tan-1 (1.7) = Now that we have a general idea of how trig functions work, let’s put everything together. Remember we are dealing with right triangles. For Angles Σθ = 180o θ1 + θ2 + θ3 = 180o For Sides a2 + b2 = c2 θ1 + θ2 + 90o = 180o θ1 + θ2 = 90o from this point forward (a & b) will be either your vertical or horizontal components & (c) is your vector magnitude. There are other names given to the sides of a right triangle. These names are useful because, those are the names used in the Trig Functions. θ2 Hypotenuse, opposite leg & adjacent leg are the three other names used for the sides of a right triangle. b θ3 θ1 Looking at the right triangle we can substitute a,b, & c with the new names. a C will always be the largest side because it is the hypotenuse. To determine the opposite and adjacent sides, we must rely on the angle. The opposite and adjacent side will change depending on which angle you are using. θ Adjacent b = opposite side & a = adjacent. b = adjacent side & a = opposite. Adjacent For example, if you use θ1 If you use θ2 then θ Opposite (Adjacent means next to) (Opposite means across from) Now that we know the relationship between the angles and the sides, we can start with the full trigonometric functions. SOH — CAH — TOA sinq = opposite hypotenuse cosq = adjacent hypotenuse tanq = opposite adjacent Trig functions are actually equations that find a ratio of the side lengths. Before we had two equations (sum of the angles & Pythagorean), but they were not related to each other, therefore we could only have one unknown. With the trig functions, we can solve triangles with two unknowns. For example: Determine the missing sides of this right triangle. We cannot use the Pythagorean Theorem because we have two missing sides. a2 + b2 = c2 a2 + b2 = 82 b 37 a Write down your givens: Θ = 37o c = Hypotenuse = 8 Using 37o, we notice that a = the adjacent side & b = the opposite side. Opposite = b = ? Adjacent = a = ? Both the angle and the HYP are given. All we need to figure out is which Trig Function is most helpful. SOH — CAH — TOA O opposite & A adjacent are both missing, therefore we rule tangent out of our choices. If the question is not asking for a specific side, then it is up to you to decide which trig function to use. I will use the sine function. sin θ = Opp / Hyp Opp = (Hyp)(Sin θ) Opp = (8)(Sin 37o) = 8(3/5) = 8(0.6) = 4.8 Now to find the third side I can use either a trig function or the Pythagorean Theorem. Using Pythagorean Theorem a2 + b2 = 82 4.82 + b2 = 82 23.04 + b2 = 64 Adj = 8 Cos 37o = 8(4/5) = 8 (0.8) = 6.4 b2 = 64 – 23 b2 = 41 b = 41 = 6.3 Using a trig function cos θ = Adj / Hyp Adj = (Hyp)(Cos θ) Determine both sides of the following triangles: 37 b b 30 a a 37 b b 53 a a We can also solve for two missing angles. θ1 Example: Determine the missing angles of this right triangle. θ We cannot use the sum of the angles because we have two missing angles θ1 + θ2 = 90o Write down your givens. This time the givens depend on the angle that you want to find first. If I want to use θ1 then: OPPOSITE = 4 ADJACENT = 3 All we need to figure out is which trig function is most helpful. SOH — CAH — TOA The opposite and adjacent sides are given. With these choices we can only use one trig function; tangent. tan θ = Opposite / Adjacent Tan θ = 4 / 3 Tan θ = 1.33 To find the angle we have to do the inverse of tan which is given by tan-1. tan θ = 1.33 θ = tan-1(1.33) From our table we see that θ1 = 53o Determine the missing angle of the following triangles: θ 6 6 θ θ 4 4 3 θ 3 End of Mathematical Problems and Concepts The next pages are your starting document for the Quick Reference Pages document CHAPTER TWO DESCRIBING MOTION: KINEMATICS IN ONE DIMENSION KEY TERMS AND PHRASES Kinematics Average Speed Instantaneous Speed Acceleration Average Acceleration Instantaneous Acceleration Uniformly Accelerated Motion (constant acceleration) Free Fall Gravitational Acceleration Vector Scalar 312 SUMMARY OF MATHEMATICAL Average Acceleration Kinematics Equations for Uniformly Accelerated Motion FORMULAS The average acceleration equals the change in speed divided by the change in time Speed as related to initial speed, acceleration and time Distance as related to initial distance, initial speed, acceleration, and time Speed as related to initial speed, acceleration, and distance. Displacement if there is no acceleration Average Velocity CONCEPT SUMMARY Kinematics Kinematics is the study of the motion of objects and involves the study of the following concepts: distance, speed, acceleration, and time. This chapter is restricted to the motion of an object along a straight line. This is known as one-dimensional or linear motion. The average speed of an object … Acceleration refers to the rate of change of speed in time. The SI unit of acceleration … Uniformly Accelerated Motion Uniformly accelerated motion occurs when … Free Fall One application of uniformly accelerated motion is to the problem of objects in free fall… The equations for uniformly accelerated motion can be applied to free fall… Frames of Reference The description of motion of any object must always be given relative to a frame of reference or reference frame… Examples of the different frames of reference typically used are given in the figures below: Vectors and Scalars A vector is a quantity that has both magnitude and direction. An example of a vector quantity is velocity… A scalar is a quantity that has magnitude but has no direction associated with it… Graphical Analysis Graphs can be used to analyze the straight line motion of objects. Although graphical analysis can be used for uniformly accelerated motion, the method is especially useful when dealing with the motion of an object that is not undergoing uniform acceleration. 314 In a distance versus time graph the instantaneous velocity at any point can be determined from the slope of a tangent line drawn to the point in question. In a velocity versus time graph the slope of the tangent line represents the instantaneous acceleration while the area under the curve represents the distance traveled. SAMPLE QUESTIONS WITH ANSWERS (you should come up with 2 or 3 more big idea type questions and answers) QUESTION 1. Does a car speedometer measure speed, velocity, or both? ANSWER: QUESTION 2. Can an object have a varying velocity if its speed is constant? If yes, give examples. ANSWER: QUESTION 3. Can an object have a northward velocity and a southward acceleration? Explain. ANSWER: PROBLEM SOLVING SKILLS For problems involving uniformly accelerated motion: 1. Obtain a mental picture by drawing a diagram that reflects the motion of the object in question. This is especially useful in the free fall problems where the initial motion may be vertically upward or downward. 2. Complete a data table using information both given and implied in the wording of the problem. 3. Use the proper sign for the quantity represented by the symbol in the data table. For example, if a car is slowing down, then the rate of acceleration is negative. If an object in free fall was initially thrown downward, then the downward direction is taken to be positive and both the initial velocity and the rate of acceleration are positive. If the object in free fall was given an initial upward motion, then the upward direction is taken to be positive. This means that the initial upward velocity is positive but the rate of acceleration is negative because it is slowing down as it travels upward. 4. Memorize the formulas for uniformly accelerated motion. It is also necessary to memorize the meaning of each symbol in each formula. Using the data from the completed data table, determine which formula or combination of formulas can be used to solve the problem. For problems related to graphical analysis where velocity is a function of time: 1. Determine the area of one block. This area represents the distance represented by a single block. 2. Count the number of blocks in the time interval being considered. Multiply the total number of blocks by the distance represented by one block. The product is the total distance traveled during the time interval. This technique is known as graphical integration. For problems related to graphical analysis where distance is a function of time: 1. The instantaneous velocity at a particular moment in time equals the slope of the tangent line drawn to the curve at the point in question. If the slope is positive, the object's speed is positive. If the slope is negative, the object's speed is negative. If the slope is zero, the object is not moving. End of QRP document The next few pages are the QRP for chapter 3. Use it as a guide and keep it handy as you work the math problems. You will need to be very familiar with trig as the class starts; however, if the math is too difficult right now DO NOT WORRY, I will reteach as much as necessary! ONCE AGAIN: It is okay for you to not understand the chapters 3-4 QRP yet, obviously this is an intro to the words and ideas, I will be reteaching all of this, even the math, so please do not stress! 316 CHAPTERS 3 AND 4 KINEMATICS IN TWO DIMENSIONS; VECTORS KEY TERMS AND PHRASES Resultant Vector is the arithmetic sum (or difference) of the magnitudes and the directions of two or more vectors. Tip to Tail method is a graphical method used to determine the vector sum of two or more vectors. The two vectors are drawn to scale and then moved parallel to their original direction until the tail of one vector is at the tip of the next vector. Once all of the vectors are joined in this manner the resultant vector can be determined. The resultant is drawn from the tail of the first vector to the tip of the last vector. The angle of the resultant above (or below) the x axis is determined by using a protractor. Parallelogram Method is a graphical method useful if two vectors are to be added. The two vectors are drawn to scale and joined at the tails. Dotted lines are then drawn from the tip of each vector parallel to the other vector. The finished diagram is a parallelogram. The resultant is along the diagonal of the parallelogram and extends from the point where the tails of the original vectors touch to the point where the dotted lines cross. The angle of the resultant above (or below) the x axis is determined by using a protractor. · Vector Component Method is used to replace each vector with components in the x and y directions. The arithmetic sum of the x components (ΣX) and y components (ΣY) are then determined. Since ΣX and ΣY are at right angles, the Pythagorean theorem can be used to determine the magnitude of the resultant. The definition of the tangent of an angle can be used to determine the angle of the resultant above (or below) the x-axis. Relative Velocity refers to the velocity of an object with respect to a particular frame of reference. Projectile Motion is the motion of an object fired (or thrown) at an angle θ with the horizontal. The only force acting on the object during its motion is gravity. SUMMARY OF MATHEMATICAL FORMULAS Projectile Motion Equations (these are the same equations you had in chapter two just broken down into components) vyo = v 0 sin θ vxo = v0 cos θ yf = y0 + vyot - ½gt2 (v yf ) 2 = (v v0 ) 2 - 2gΔy Initial vertical component of a projectile's velocity Initial horizontal component of a projectile's velocity Vertical component of an object's position (y) as related to its initial speed (vy0) gravitational acceleration (g), and time of motion (t) Vertical component of an object's velocity (vyf) as related to its initial speed (vy0) 0 gravitational acceleration (g), and position (y) vyf = vyo - gt vertical component of an object's velocity (vyf) as related to its initial speed (vy0) 0 gravitational acceleration (g), and time (t) vxf = vxo horizontal component of velocity (vxf) remains constant during the projectile's flight xf = x0 + vxot horizontal component of an object's position (xf) as related to the initial horizontal speed (vx0)and time (t) CONCEPT SUMMARY Addition of Vectors - Graphical Methods If two vectors are in the same direction and along the same line, the resultant vector will be the arithmetic sum of the magnitudes and the direction will be in the direction of the original vectors. If the vectors are in opposite directions and along the same line, the resultant vector will have a magnitude equal to the difference in the magnitudes of the original vectors and the direction of the resultant will be in the direction of the vector which has the greater magnitude. If the vectors are at some angle to each other than 0° or 180°, then special methods must be used to determine the magnitude and direction of the resultant. Two graphical methods used are the 1) tip to tail method and 2) parallelogram method. The graphical methods involve the use 3- of a ruler and a protractor. An appropriate scale factor 18 must be used to represent the vectors. For example, a velocity vector whose magnitude of 3.0 m/s and is directed due east can be represented by a line 3.0 cm long directed along the +x axis. 3.0 cm +x Tip to Tail M ethod The tip to tail method can be conveniently used for two or more vectors. The method consists of moving the vectors parallel to their original direction until the tail of one vector is at the tip of the next vector. Once all of the vectors are joined in this manner the resultant vector can be determined. The resultant is drawn from the tail of the first vector to the head of the last vector. For example, the resultant velocity (vR) relative to thebank of a river for a person swimming at 3.0 m/s downstream in a river with a current of 1.0 m/s can be determined as shown in the figure. Measuring the length of the vector and multiplying by the scale factor can determine the magnitude of the resultant. The scale used in the diagram is 1.0 cm = 1.0 m/s. 4.0 m/s 1.0 m/s 3.0 m/s Using a ruler it can be determined that the resultant has a length of 4.0 cm. Therefore, the magnitude is (4.0 cm) x (1.0 m/s)/(1.0 cm) = 4.0 m/s. The direction of the resultant vector is downstream. Parallelogram Method The parallelogram method is useful if two vectors are to be added. If more than two vectors are involved, the method becomes cumbersome and an alternate method should be used. The two vectors are drawn to scale and joined at the tails. Dotted lines are then drawn from the tip of each vector parallel to the other vector. A protractor can be used to ensure that the lines are drawn parallel. The finished diagram is a parallelogram. The resultant is along the diagonal of the parallelogram and extends from the point where the tails of the original vectors touch to the point where the dotted lines cross. As in the tip to tail method, measuring the length of the resultant and multiplying by the scale factor used to represent the vectors determine the resultant. The angle of the resultant above (or below) the x-axis is determined by using a protractor. For example, determine the sum of the following vectors: v1 = 3.0 m/s due east, v2 = 4.0 m/s due north. Step 1. Draw a diagram representing each with the tail of each joined at a point. Scale: let 1.0 cm = 1.0 m/s. Step 2. Complete the parallelogram. Draw the resultant vector across the diagonal. Determine Using a ruler, it can be determined that the resultant has a length of 5.0 cm. Therefore, the magnitude of the resultant is (5.0 cm) x ( 1.0 rn/s)/(1.0 cm) = 5.0 m/s. Using a protractor, the angle θ can be determined to be 53° north of east. Therefore, vR= 5.0 m/s, at 53° N of E. Subtraction of Vector.s The negative of a vector is a vector of the same magnitude but in the opposite direction. Thus, if vector v = 5 m/s due east, then -v = 5 m/s due west. In order to subtract one vector from another, rewrite the problem so that the rules of vector addition can be applied. For example, A - B can be rewritten as A + (-B). Determine the magnitude and direction of -B and apply the rules of vector addition to solve for the resultant vector. Multiplication of a Vector by a Scalar The product of a vector times a scalar has the same direction as the vector and a magnitude equal to the product of the magnitude of the scalar times the magnitude of the vector. For example, if c is a scalar while V is a vector, then the product has a magnitude cV and the same direction as V. If c is a negative scalar, the magnitude of the resultant is still cV but the direction of the resultant is directly opposite that of V. Analytic Method for Adding Vectors In the trigonometric component method, each of the original vectors is expressed as the vector sum of two other vectors. The two vectors 3-are chosen to be in directions, which are perpendicular to 20 another one. At first, this method may seem long and tedious. However, with some practice this method is by far the most useful for this course. For problems involving the addition of two or more vectors lying in the x-y plane, the method reduces to the following steps: Step 1. Resolve each vector into x and y components. If the angle is measured from the x- axis to the vector, then the x component is equal to the product of the magnitude of the vector and the cosine of the angle. The y component is equal to the product of the magnitude of the vector and the sine of the angle. For example, for Vx = 5.0 m/s at 30 degrees N of E vx = v cos θ= (5.0 m/s)(cos 30°) then vx = (5.0 m/s)(0.87) = 4.3 m/s vy = v sin 8 = (5.0 m/s)(sin 30°) then vy = (5.0 m/s)(0.50) = 2.5 m/s Step 2. Sign Convention Assign a positive value to the magnitude if the component is i n the +x or + y direction and a negative value if the component is in the -x or -y direction. Thus, for the vector used as an example in step 1, vx = + 4.3 m/s and vy = + 2.5 m/s Step 3. Reduce the problem to the sum of two vectors. Determine the sum of the x components (ΣX) and the sum of the sum of the y components (ΣY), where is the upper case Greek letter sigma which is designated to mean "the sum of." Since the x components are along the same line, their magnitudes are added arithmetically. This is also true for the y components. Step 4. Determine the magnitude and direction of the resultant. Since X and Y are at right angles, the Pythagorean theorem can be used to determine the magnitude of the resultant. The definition of the tangent of an angle can be used to determine the direction of the resultant. Relative Velocity Relative velocity refers to the velocity of an object with respect to a particular frame of reference. As in chapter 2, the reference frame is usually specified by using Cartesian coordinates, i.e., x, y and z axes, relative to which the position and/or motion of an object can be determined. As stated in the text, the velocity of an object relative to one frame of reference can be found by vector addition if its velocity relative to a second frame of reference and the relative velocity of the two reference frames are known. Projectile Motion Projectile motion is the motion of an object fired at an angle θ with the horizontal. This motion can be discussed by analyzing the horizontal component of the object's motion independently of the vertical component of motion. If air resistance is negligible, then the horizontal component of motion does not change; thus ax = 0 and v x = vxo = constant. The vertical component of motion is affected by gravity and is described by the equations for an object in free fall as discussed in chapter 2. The following equations are used to describe the motion of a projectile. vertical component of motion horizontal component of motion x = vxot yf = Vyot - ½gt2 where vx = v x 0 (vy)2 = (vy0)2 - 2gΔy vy is the vertical component of velocity at time t. vyo is the initial vertical component of velocity' vyo = v0 sin θ. g is the acceleration due to gravity, g = 9.81 m/s2• t is the time interval of the motion, t0 = 0 s. 0 yf is the vertical displacement from the starting point. The starting point is the reference point and the vertical displacement at this point is arbitrarily taken to be zero. Since typically y0 = 0, this term, y0, will often not be in the equations. xf is the horizontal displacement from the starting point. x0 is also typically zero, so it is not usually written in the equations. vx is the initial horizontal component of velocity. Assuming air resistance to be negligible, the horizontal component of velocity does not change during the motion. Therefore, vxf = vx0 = v0 cos θ. 322 SELECTED TEXT QUESTIONS WITH ANSWERS QUESTION 1. Does the odometer of a car measure a scalar or a vector quantity? What about the speedometer? ANSWER: Distance traveled is measured on the odometer while speed is measured on the speedometer. Distance and speed are scalar quantities while displacement and velocity are vector quantities. The odometer will record the distance traveled but does not record the displacement from the starting point. For example, if a student drives one mile to a convenience store and then back to his starting point, the odometer will record a trip of two miles. However, his displacement from his starting point will be zero. Also, the speedometer records the magnitude of the motion but not the direction. QUESTION 2. Two vectors have length V 1 = 3.5 km and V2 = 4.0 km. What are the maximum and minimum magnitudes of their vector sum? ANSWER: The maximum magnitude occurs if the two vectors are in the same direction. The resultant velocity is the arithmetic sum of their magnitudes, i.e., VR = 3.5 km + 4.0 km = 7.5 km. The minimum magnitude occurs if the two vectors are in opposite directions. The resultant velocity is the difference of their magnitudes, i.e., VR = 4.0 km - 3.5 km = 0.5 km in the direction of the vector which has the greater magnitude. QUESTION 3. A projectile has the least speed at what point in its path? ANSWER: The motion of a projectile at any point in its motion is the vector sum of the horizontal component and the vertical component of its velocity. In the absence of air resistance, the magnitude of horizontal component does not change v x = vxo· As a projectile travels upward the magnitude of the vertical component decreases reaching zero at maximum height, and on the way down, the vertical component of velocity again increases. Since the velocity is the vector sum of the components, the magnitude of the velocity (i.e., the speed) must have a minimum value at the point where the vertical component is zero. Therefore, the minimum value of the speed occurs at the point where the projectile reaches maximum height. PROBLEM SOLVING SKILLS For problems involving vector addition or subtraction: 1. Use a protractor and ruler to accurately represent each vector involved in the problem. Make sure to use an appropriate scale factor in representing the vector. 2. Choose an appropriate method to solve the problem. If a graphical method is used, be sure to measure both the magnitude and direction of the resultant. 1. If the trigonometric component method is used, you must 1) Break each vector into x and y components. 2) Use the sign convention and assign a positive sign or a negative sign to the magnitude. 3) Determine the sum of the x components and repeat for the sum of the y components. 4) Use the Pythagorean t h e o r e m and simple trigonometry to solve for the magnitude and direction of the resultant. For problems involving projectile motion: 1. Draw an accurate diagram showing the trajectory of the projectile. 2. Use the trigonometric component method to determine vxo and vyo· 3. Complete a data table using information both given and implied in the wording of the problem. 4. As in the free fall problems of chapter 2, use the appropriate sign convention depending on whether the object was initially moving upward or downward. 5. Memorize the formulas for projectile motion. It is also necessary to memorize the meaning of each symbol in each formula. Using the data from the completed data table, determine which formula or combination of formulas must be used to solve the problem. 324