efficient interval goal programming for arbitrary penalty function
advertisement

EFFICIENT INTERVAL GOAL PROGRAMMING FOR ARBITRARY PENALTY
FUNCTION
Hao-Chun Lu*, Fu Jen Catholic University, Taiwan
haoclu@gmail.com, *corresponding author
Tzu-Li Chen, Fu Jen Catholic University, Taiwan
chentzuli@gmail.com
ABSTRACT
Penalty function is a key factor in interval goal programming (IGP), especially for decisionmaker weighing resources vis-à-vis goals. Many approaches have been proposed for treating
several types of penalty function in the past several decades. The recent approach proposed
by Chang (2009) considers the S-shaped penalty function. Although there are many
approaches in literatures, all are complicated and inefficient. This paper proposes a novel
and concise uniform model to treat any arbitrary penalty function in IGP. The efficiency and
usefulness of the proposed model are demonstrat by several numeric examples.
Keywords: interval goal programming, penalty function
INTRODUCTION
The goal programming (GP) model is a well-known aggregating procedure for solving multiobjective decision problems. This takes into account many objectives simultaneously, which
can be conflicting. GP was firstly proposed by Charnes and Cooper (1961) and has been
applied to many real-world problems in areas like management, marketing, economics,
engineering, transformation, finance, government, and internal context (Schniederjans,
1995; Lai and Hwang, 1994). It is an important technique in considering several objectives
for finding an acceptable solution. It can be said that GP is the most widely used technique
for solving multi-criteria and multi-objective decision-making problems. It can be formulated
in the following traditional form:
m
Min
(w n
i 1
s.t.
i i
wi pi )
fi (x) ni pi gi , i 1,..., m ,
x F ; ni , pi 0 i .
where x is a vector of decision variables, F is a feasible set of constraints, fi (x) and gi are
the goal function and its aspiration level, ni and pi are negative and position unwanted
deviations from its target value, respectively. Any unwanted deviation with respect to its
target is penalized according to the marginal constants wi and wi .
Many approaches (Jones and Tamiz, 1995; Vitoriano and Romero, 1999; Romero, 2004;
Chang, 2006; Chang, 2009) have been proposed for treating different shapes of penalty
function in the past few decades. Different penalty functions require different approaches to
solve the IGP problem. Although there are many approaches in literature, there is a lack of a
concise uniform model to treat any arbitrary penalty function in IGP. This paper proposes a
novel model to solve this practical problem and has the following features:
(i) Regardless of the complexity of the penalty function, this model will easily treat any
type of penalty function in a uniform way.
(ii) This uniform model is more concise and efficient than current ones.
CURRENT RELATED IGP MODEL
The idea of IGP proposed by Charnes and Collomb (1972) was first developed by Jones and
Tamiz (1995). Increasing penalty and reverse penalty models were introduced in their article.
For example, take an IGP problem with m goals. Suppose there are k1 k 2 attribute values
(the points of position on to the related target value) in penalty function of the ith goal. The
attribute values are ai ,k 1 ,..., ai ,1 , bi ,1,..., bi ,k 2 where ai ,k 1 ... ai ,1 bi ,1 ... bi ,k 2 . Then, the
marginal penalty rates for each segment between adjacent attribute values are
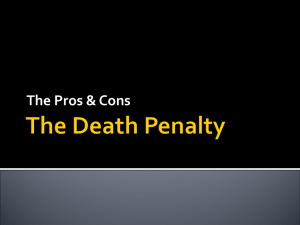
i ,k 11 ,..., i ,1 ,0, i ,1 ,..., i ,k 21 . This U-shaped penalty function (Fig. 1) can be expressed by
Jones and Tamiz (1995) as follows:
Jones and Tamiz’s model (1995):
m
k 11
k 21
Min i ,1ni ,1 (i , j i , j 1 )ni , j i ,1i ,1 ( i , j i , j 1 )i , j
i 1
j 2
j 2
s.t. f i (x ) ni , j pi , j ai , j , j 1,..., k1 1, i 1,..., m ,
(1)
f i ( x ) i , j i , j bi , j , j 1,..., k 2 1, i 1,..., m ,
(2)
ni , j Mui , j , pi , j M (1 ui , j ), j 2,..., k1 1 ,
(3)
i , j Mvi , j , i , j M (1 vi , j ), j 2,..., k 2 1 ,
(4)
x F ; ni , j , pi , j ,i , j , i , j 0 i , j ,
where ui , j and vi , j are binary variables, M is a big enough constant, and ni , j and i , j
present deviation variables for the left U-shaped penalty function and the right U-shaped
penalty function, respectively .
For this U-shaped penalty function, two cases can be used in the Jones and Tamiz’s model.
One is increasing penalty case ( i , j 1 i , j , i , j 1 i , j i, j ), which only require Constraints
(1) and (2). The other one is reverse penalty case ( i , j 1 i , j , i , j 1 i , j i, j ), which uses
Big-M Constraints (3) and (4) to avoid both ni , j and pi , j ( i , j and i , j ) becoming zero
simultaneously, since the coefficients of ni , j ( i , j ) in achievement function are negative.
Penalty
αk1-1
βk2-1
...
α1
ak1
...
β1
ak1-1
a2
a1 b1
b2 bk2-1 bk2
Attribute Value
Figure 1: A U-shaped penalty function.
Recently, Chang (2006) proposed a new model of increasing penalty function for improving
efficiency. The two aforementioned models (Jones and Tamiz, 1995; Chang, 2006) solve the
penalty function regardless if marginal penalty rates for sequence segments are increasing
or decreasing. However, these cannot solve the complex penalty function in an IGP. Yang et
al. (1991) proposed a model for solving fuzzy programming problems with S-shaped
membership function. Li and Yu (1999) showed that Yang et al.’s (1991) model is correct only
for a specific type membership function and proposed their own model for other types of
membership functions. Lin and Chen (2002) generalized the model of Yang et al. (1991) and
indicated that the model of Li and Yu (1999) is inapplicable to a fuzzy programming problem
involving more than one membership function. Recently, Chang and Lin (2009) proposed a
complex formulation to solve the simplest S-shaped penalty function in an IGP problem.
However, when the models of Jones and Tamiz (1995) and Chang and Lin (2009) meet the
reverse penalty case, they will become inefficient and complicated because of the Big-M
constraints. Although there are many approaches in literature, all have been complicated
and inefficient up to now. This paper proposes an efficient and concise uniform model to
treat any arbitrary penalty function in IGP.
PROPOSED IGP MODEL FOR ARBITRARY PENALTY FUNCTION
Penalty
H(p)
h1
αk1-1 h2
...hk1-3
α3 hk1-2 hk1-1
α2
ak1
p1
ak1-1 a4 a3
p2 pk1-3 pk1-2
hk1+k2
hk1+k2-1
βk2-1
hk1+2
...
α1 hk1 hk1+1 β1
a2
a1 b1 b2 bk2-1 bk2
pk1-1 pk1 pk1+1 pk1+2 pk1+k2-1 pk1+k2
Attribute Value
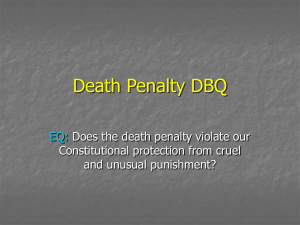
Figure 2: An arbitrary penalty function.
x
An arbitrary penalty function in IGP is a difficult problem (Fig. 2) since DMs can choice their
preferred the marginal penalty rates for each segment between adjacent attribute values. As
such, the slopes of each segment can be any arbitrary value, either positive or negative. For
convenient modeling, another symbol is used to denote the original attributed values. Hence,
p1 ak 1 , …, pk1 a1 , pk11 b1 , …, pk bk 2 ( k k1 k 2 ). The arbitrary penalty function can
be expressed by Proposition 1.
Proposition 1
The penalty function H ( p ) (Fig. 2), h j is the penalty value related to the
attribute values p j where j 1,..., k ( H ( p j ) h j ) . k positive continuous variables
(1 ,..., k ) and k 1 binary variables (u1 ,..., uk 1 ) are introduced in this model. H ( p ) can be
expressed by the following linear equations and inequalities:
k
p j p j ,
(5)
j 1
k
H ( p) j h j ,
(6)
j 1
k
j 1
j
1,
(7)
j
1,
(8)
k 1
u
j 1
1 u1 , j u j 1 u j , j 2,..., k 1 , k uk 1 .
Proof
It is trivial.
(9)
□
In Proposition 1, the value of penalty in (6) will be zero when uk1 1 because the goal value
between a1 and b1 meets the aspiration level that DMs choose. Afterwards, the penalty will
be continuously increasing depending on the marginal penalty rates when the goal value is
far away from the aspiration level. The model in Proposition 1 has an improvement over
current models since there are no Big-M constraints. However, Constraint (9) requires k 1
binary variables and k constraints to construct the model. It still seems inefficient for solving
the arbitrary penalty function in IGP. Vielma and Nemhauser (2010) proposed a technology
that constructs Constraint with a logarithmic number of binary variables and constraints.
Therefore, Vielma and Nemhauser (2010)’s technology is used to reduce the required binary
variables and constraints and conduct the concise uniform model for treating any arbitrary
penalty function. The proposed model is described in Proposition 2.
Proposition 2
The penalty function H ( p ) in Proposition1 can be expressed by the
following linear equations and inequalities:
m
Min
k
i 1 j 1
h
i, j i, j
k
fi (x) i , j pi , j , i 1,..., m ,
s.t.
j 1
k
j 1
i, j
jJ l
i, j
1, i 1,..., m ,
vi ,l ,
jJ l
i, j
(10)
(1 vi ,l ), l 1,..., r, i 1,..., m ,
x F ; i , j 0 i, j ; vi ,l {0,1} i , l ,
(11)
(12)
where
(i)
pi , j and hi , j are the attribute values and related penalty value for goal i
( pi ,1 ... pi ,k ),
J l and J l are same in Proposition 2,
(ii)
Proof
It is similar to Proposition 1.
□
NUMERICAL EXAMPLES
To demonstrate the usefulness and efficiency of the proposed model, three examples are
presented here and are solved by CPLEX 11 (ILOG 2008) on a PC with 3.16 GHz Core™2 Duo
CPU and 4GB RAM.
Example 1
The example is modified from the IGP problem of Vitoriano and Romero
(1999). The problem is expressed as follows and the three goal penalty scale data are listed
in Table 1.
Goals: ( f1 (x) ) 3x1 2.5x2 2.5x3 100
( f 2 (x ) ) 4 x1 3x2 3.5x3 100
( f 3 ( x ) ) 3.8 x1 5x2 3.5x3 100
s.t. x2 x3 10 ,
x1 0 , x2 4 , x3 0 .
(13)
(14)
Only two models (Chang and Lin, 2009; proposed model) can solve this IGP because those
penalty functions are U-shaped, S-shaped, and arbitrary shaped respectively.
By referring to Chang and Lin (2009), this example can be formulated as a complicated and
inefficient model. For the arbitrary penalty function (Goal 3), this model uses much binary
variables and Big-M constraints to restrict the domain of ni , j and i , j . Each of non-linear
term ( u2,3 f 2 ( x ) , v2,3 f 2 ( x ) , u3,2 f 3 ( x ) , v3,2 f 3 ( x ) , u3,3 f 3 ( x ) , v3,3 f 3 (x ) ) also require an
additional binary variable and four Big-M constraints for linearization. The efficiency of this
model will be hampered by the Big-M constraints. Compared to Chang and Lin’s (2009)
model, the proposed model is concise and efficient for treating any arbitrary penalty
function in IGP. The respective computational times, iterations, binary variables, additional
constraints, and solution are listed in Table 2.
Table 1: Penalty scale for the three goals.
Goals Description Interval
Marginal
(Unit %)
penalty
1
U-shaped
10~80
3
increasing
80~90
2
penalty
90~100
1
function
100~110
0
110~120
1
120~130
2
130~200
3
2
S-shaped
10~80
0.9
penalty
80~90
2
function
90~100
1
100~110
0
110~120
1
120~130
2
130~200
0.9
3
Arbitrary
10~80
2
penalty
80~90
1
function
90~100
2
100~110
0
110~120
2
120~130
1
130~200
2
Table 2: The Computation Results for Example 1.
Item
Chang and
Proposed
Lin’s model
model
CPU Time(sec)
0.11
0
No. of iterations
47
16
No. of 0-1 variables
12
9
No. of constraints
60
21
(18.33,
4,
6)
Solution ( x1 , x2 , x3 )
Goal (1,2,3)
(80, 106.33, 110.67)
CONCLUSION
This paper proposes an efficient and concise model to treat any arbitrary penalty function in
IGP. Regardless of the complexity of the penalty function, this model can efficiently solve any
arbitrary penalty function in a uniform way, and with binary variables and constraints that
only require logarithmic numbers of original ones. Numerical examples show that this novel
model for treating arbitrary penalty function in IGP has favorably tight properties, while
computational results demonstrate that it significantly outperforms current models,
especially when the scale of a problem is large.
ACKNOWLEDGMENTS
This work was supported by the National Science Council of Taiwan under grants NSC 982221-E-030-009 and NSC 99-2221-E-030-005. The authors wish to thank the area editor, the
associate editor, and the anonymous referees for providing insightful comments and
suggestions, which have helped us, improve the quality of the paper.
REFERENCES
1. Chang, C.T. 2006. Mixed binary interval goal programming. Journal of Operational
Research Society. 57 469–473.
2. Chang, C.T., Lin, T.C. 2009. Interval goal programming for S-shaped penalty function.
European Journal of Operational Research. 199 9–20.
3. Charnes, A., Collomb, B. 1972. Optimal stabilization policy: Linear goal-interval
programming models. Socio-Eco Plan Science. 6 431–435.
4. Charnes, A., Cooper, W.W. 1961. Management Models and Industrial Application of
Linear Programming. Wiley. New York.
5. ILOG. 2008. ILOG CPLEX user’s manual. IBM ILOG, Armonk, NY.
Retrieved from: http://www-01.ibm.com/software/integration/optimization/cplexoptimizer/.
6. Lai, Y.J., Hwang, C.L. 1994. Fuzzy multiple objective decision making: Methods and
applications. Springer. New York.
7. Li, H.L., Yu, C.S. 1999. Comments on “Fuzzy programming with nonlinear membership
function: Piecewise linear approximation”. Fuzzy Sets and Systems. 101 109–113.
8. Lin C.C., Chen A.P. 2002. Generalization of Yang et al.’s method for fuzzy programming
with piecewise linear membership functions. Fuzzy Sets and Systems. 132 347–352.
9. Jones, D.F., Tamiz, M. 1995. Expanding the flexibility of goal programming via preference
modeling techniques. Omega. 23 41–48.
10. Schniederjans, M.J. 1995. Goal programming: Methodology and applications. Kluwer
Academic Publishers. Boston.
11. Romero, C. 2004. A general structure of achievement function for a goal programming
model. European Journal of Operational Research. 153 675–686.
12. Vielma, J.P., Ahmed, S., Nemhauser, G. 2010. Mixed-integer Models for Nonseparable
Piecewise Linear optimization: unifying framework and extensions. Operations Research.
58 303–315.
13. Vitoriano, B., Romero, C. 1999. Extended interval goal programming. Journal of
Operational Research Society. 50 1280–1283.
14. Yang, T., Ignizio, J.P., Kim, H.J. 1991. Fuzzy programming with nonlinear membership
function: Piecewise linear approximation. Fuzzy Sets and Systems. 41 39–53.