Polar Graph Project - Steven Prascius`s e
advertisement

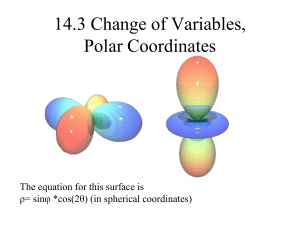
Steven Prascius 5/6/2012 FST/10A Polar Graphs Part 1. Exploration: Polar graph are types of graphs that are not found on the traditional x and y-axis coordinates. These graphs are plotted on r and theta coordinates. There are many types of polar graphs, but the two main ones that will be discussed are the rose curve and the cochleoid. These graphs each can be manipulated through changing their a and b values, along with sine or cosine if they have them. The first graph that will be discussed is the rose curve. The rose curve is a graph that resembles the petals on a rose. This graph has two similar equations, which are r = a*sin(b θ) and r = a*cos (b θ). The rose curve’s orientation, size, and number of “petals” can be changed depending on the value of a and b, and whether the equation contains sine or cosine. The orientation of the graph is controlled by sine or cosine, where sine plots the graph on the y-axis and cosine on the x-axis. This is shown in a three petal rose curve in figure 1 below. Figure1. Rose curve polar graphs As shown in figure 1, the graph with sine has one of its petals directly on the y-axis, unlike the graph with cosine which has one petal on the x-axis. The a and b values of the rose curve control the size and number of “petals” on the graph. The a value of the rose curve equation determines how long each petal Steven Prascius 5/6/2012 FST/10A is, and depending on whether a is positive or negative, the direction the petals face. The size of the petals increase or decrease by exactly the value of a. This means that if a was three, then the petals would be three units long. This is true for every case except when a is equal to zero. When a is zero, no graph is displayed because the petals are zero units long. Also, when a is less than zero, the direction of the graph is changed. For example, if a was equal to negative two, the graph would be the same as one with positive two, only facing the opposite direction. This is known as a reflection, meaning the graphs are the same only facing opposite directons, like looking through a mirror. This example is shown in a three petal rose curve in figure 2 below. Figure 2. positive and negative rose curves The b value for the rose curve controls how many petals there will be. The number of petals varies from even to odd numbers. For even numbers, the number of petals is equal to b times two, while odd numbers have petals equal to the number of b. For example, if b was three there would be three petals, and if b was four then there would be eight petals. The only exceptions for this are when b is equal to zero or b is a decimal. When b is zero, there is one petal instead of zero petals. When b is a decimal, the number of petals is equal to the decimal times two. Also, when b is an irrational number, there are an infinite amount of petals. This is how a and b, along with sine and cosine, can change the rose curve. 2 Steven Prascius 5/6/2012 FST/10A The second polar graph that will be discusses is the cochleoid. The cochleoid resembles a spiral, and its equation is r = (a*sin θ)/ θ. In this equation, a controls the size of the spiral by determining where on the x-axis the graph ends. Where on the x-axis the graph ends is equal to the value of a. This is true for both whole numbers and decimals. For example, if a was three then the spiral would end on three on the x-axis. Also, when a is less than zero the resulting spiral is a rotation of 180 degrees from the original spiral. This is shown in figure 3 below. Figure 3. positive and negative Cochleoid graph This is how a can change the size and orientation of the cochleoid graph. History The polar graphs of the rose curve and the cochleoid each have their own history and interesting facts. The rose curve was discovered by an Italian mathematician named Guido Grandi in the 1720s . The rose curve was originally called rhodonea, which means rose in Italian. This polar graph was named this because of its resemblance to a flower. The cochleoid was originally thought of by J peck in the 1700s, but was not discovered in its form used today until the 1880s by Joseph Neuberg. This polar graph was 3 Steven Prascius 5/6/2012 FST/10A named cochleoid, or snail-form in latin because of its resemblance to a snail shell. This is how each polar graph was discovered and named. Polar graphs(graphed on ti-nspire) Name: rose curve equation: r=2*sin(4* θ) Window: default Description: This graph is a 8 “petal” rose curve that is plotted on the y-axis using sine. Each petal is 2 units long. 4 Steven Prascius 5/6/2012 FST/10A Name: rose curve equation: r=2*cos(3* θ) Window: default Description: This graph is a three “petal” rose curve that is plotted on the x-axis with cosine. Each petal is also 2 units long. 5 Steven Prascius 5/6/2012 FST/10A Name: rose curve equation: r=-2*cos(3* θ) Window: default Description: This graph is a three “petal” rose curve that is plotted on the x-axis using cosine. Each petal is two units long. 6 Steven Prascius 5/6/2012 FST/10A Name: Rose curve Equation:4*sin(2.5* θ) Window: default Description: This graph shows a rose curve with a decimal for b. This comes out to be a five petal rose Curve. 7 Steven Prascius 5/6/2012 FST/10A Name: Cochleoid Equation: r=(3*sin θ)/ θ Window: default Description: This graph is a cochleoid that has an a value of 3. Name: Cochleoid equation: r= (3.5*sin θ)/ θ Window: default Description: This is a cochleoid that has a decimal of 3.5 as the a value. 8 Steven Prascius 5/6/2012 FST/10A Name: Cochleoid equation: r=-3*sin θ/ θ Window: default Description: This graph shows a cochleoid with a negative a value. 9 Steven Prascius 5/6/2012 FST/10A Part 2. Masterpiece: “The Intersection” Equations: r = 4*sec(2* θ) r=csc(-θ) r = -sec(θ) r = sec(θ) r = csc(θ) Window: X-Min: -7.24 X-Max: 7.64 Y-Min: -7.02 Y-Max: 8.73 10 Steven Prascius 5/6/2012 FST/10A Part 3.Real-world application: Polar graphs and their coordinates are two-dimensional planes that usually connect one point to another or display some type of pattern. These graphs are not only used in mathematics, but also in many real world applications. Polar graphs are used in fields that involve two-dimensional objects, like navigation, radar, and the making of microphones. One of the main applications for polar graphs is navigation. There are many reasons why these types of graphs are used in navigation, but the main one is that they are displayed on a graph that use both angles and distances. Since polar coordinates use both angles and distances, they are used to plan the direction of travel for the vehicle. The most common type of transportation to use polar graphs is aircraft. Aircraft use a modified version of the polar coordinates where the ray of 0 °corresponds to 90 °. This then continues clockwise around the polar coordinates with 180 °,270 °, and 360 °. These points also correspond to headings, with 90 ° being east,180 ° being south, and so on. These points then allow the aircraft to plan its direction of travel with an angle and a distance, or theta and r on regular polar coordinates. This is how polar coordinates are used in navigation Another common application for polar graphs and coordinates is in radar. Radar is a device that displays the positions of aircraft, ships, or other objects through emitting electronic waves. These electronic waves bounce off the object and return to the sender, which then display position. Radar can be shown in a rectangular coordinate system, but is most commonly shown on a polar coordinate system because it is easier to read. The main reason polar coordinates are most often used in radar is that the polar coordinates allow the reader to easily see where objects are located because of the circles and rays that show angles and distances from 11 Steven Prascius 5/6/2012 FST/10A where the reader is located to where the other objects are. Also, polar coordinates are used in radar because polar coordinates are most similar to the way the information is collected. This is because the electronic waves used to collect the information are sent out in a complete circle around the sender, which resembles the circle on a polar coordinate system. Since polar coordinates and the way information is collected are so similar, it is easy to display on a polar grid. This is how polar coordinates are used in radar. Polar graphs and coordinates are also used in microphones. Since there are many types of microphones that record and project sound from different angles and direction, different polar graphs are used to help collect sounds from certain directions. For example, in an omnidirectional microphone, sound is recorded from all sides of the microphone, and this happens because the microphone is programmed to use the polar graph of r=sin θ, which is a circle. This allows sound to be recorded from all directins around the microphone. In cardiod microphones, sound is recorded only from the front of the microphone. This happens because the microphone uses the polar graph of a cardiod, which is a heart shaped graph that extends only in one direction,which allows sound to be recorded from only in front of the microphone. These are examples of how polar graphs are used to control which directions sound in recorded in microphones. Polar graphs and their coordinates are not only used in mathematics, but in many other ways including in navigation, radar, and microphones. These unique graphs allow more precise measurements of angles and distances that could not be shown in rectangular coordinates, which is why polar graphs are mostly in the fields of positioning and direction. I believe that polar graphs are very important in the real world, and should continue to be used as they are now. 12 Steven Prascius 5/6/2012 FST/10A Sources History: Lee, Xah. "Rose Curve." Rose Curve. XahLee.org. Web. 06 May 2012. <http://xahlee.org/SpecialPlaneCurves_dir/Rose_dir/rose.html>. "Rose Curve." Rose Curve. The Encyclopedia of Science. Web. 06 May 2012. <http://www.daviddarling.info/encyclopedia/R/rose_curve.html>. Weisstein, Eric W. "Cochleoid." MathWorld.com. MathWorld. Web. 06 May 2012. <http://mathworld.wolfram.com/Cochleoid.html>. Real World Application: "POLAR COORDINATES." Bellevuecollege. Web. 6 May 2012. <http://scidiv.bellevuecollege.edu/dh/ccal/CC9.1.pdf>. Bourne, Murray. "SquareCircleZ." Polar Coordinates and Cardioid Microphones ::. Intmath. Web. 06 May 2012. <http://www.intmath.com/blog/polar-coordinates-and-cardioid-microphones/2496>. "Radar." Merriam-Webster. Merriam-Webster. Web. 06 May 2012. <http://www.merriamwebster.com/dictionary/radar>. 13