Percent reduction in emissions=
advertisement

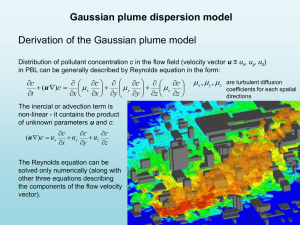
Air Quality Models Introduction Governing Equation and Components Types of Air Quality Models US EPA Models Introduction Air quality models use mathematical and numerical techniques to simulate the physical and chemical processes that affect air pollutants as they disperse and react in the atmosphere. Based on inputs of meteorological data and source information like emission rates and stack height, these models are designed to characterize primary pollutants that are emitted directly into the atmosphere and, in some cases, secondary pollutants that are formed as a result of complex chemical reactions within the atmosphere. These models are important to our air quality management system because they are widely used by agencies tasked with controlling air pollution to both identify source contributions to air quality problems and assist in the design of effective strategies to reduce harmful air pollutants. For example, air quality models can be used during the permitting process to verify that a new source will not exceed ambient air quality standards or, if necessary, determine appropriate additional control requirements. In addition, air quality models can also be used to predict future pollutant concentrations from multiple sources after the implementation of a new regulatory program, in order to estimate the effectiveness of the program in reducing harmful exposures to humans and the environment. There are many different types of atmospheric dispersion models - all sorts of simple models as well as complex models. In a given situation it may be justified to use a simple model - it all depends on the conditions. A model should be fit for the purpose for which it is applied. There are numerous ways to classify models (e.g., they can be classified according to the policy issue they address). Examples: industrial pollution, urban air quality, nuclear emergencies, chemical emergencies, climate change, etc. Another option is to classify models according to model concept. Examples: Gaussian models, Eulerian models, Lagrangian models, receptor models, etc. The most commonly used air quality models include the followings: Dispersion Model: Dispersion modeling uses mathematical formulations to characterize the atmospheric processes that disperse a pollutant emitted by a source. Based on emissions and meteorological inputs, a dispersion model can be used to predict concentrations at selected downwind receptor locations. These air quality models are used to determine compliance with National Ambient Air Quality Standards (NAAQS), and other regulatory requirements such as New Source Review (NSR) and Prevention of Significant Deterioration (PSD) regulations. Photochemical Model: Photochemical air quality models have become widely recognized and routinely utilized tools for regulatory analysis and attainment demonstrations by assessing the effectiveness of control strategies. These photochemical models are large-scale air quality models that simulate the changes of pollutant concentrations in the atmosphere using a set of mathematical equations characterizing the chemical and physical processes in the atmosphere. These models are applied at multiple spatial scales from local, regional, national, and global. There are two types of photochemical air quality models commonly used in air quality assessments: the Lagrangian trajectory model that employs a moving frame of reference, and the Eulerian grid model that uses a fixed coordinate system with respect to the ground. Earlier generation modeling efforts often adopted the Lagrangian approach to simulate the pollutants formation because of its computational simplicity. The disadvantage of Lagrangian approach, however, is that the physical processes it can describe are somewhat incomplete. Most of the current operational photochemical air quality models have adopted the three-dimensional Eulerian grid modeling mainly because of its ability to better and more fully characterize physical processes in the atmosphere and predict the species concentrations throughout the entire model domain. Receptor Model: These models are observational techniques which use the chemical and physical characteristics of gases and particles measured at source and receptor to both identify the presence of and to quantify source contributions to receptor concentrations. Unlike photochemical and dispersion air quality models, receptor models do not use pollutant emissions, meteorological data and chemical transformation mechanisms to estimate the contribution of sources to receptor concentrations. Instead, receptor models use the chemical and physical characteristics of gases and particles measured at source and receptor to both identify the presence of and to quantify source contributions to receptor concentrations. These models are therefore a natural complement to other air quality models and are used as part of State Implementation Plans (SIPs) for identifying sources contributing to air quality problems. The US EPA has developed the Chemical Mass Balance (CMB) and UNMIX models as well as the Positive Matrix Factorization (PMF) method for use in air quality management. CMB fully apportions receptor concentrations to chemically distinct source-types depending upon the source profile database, while UNMIX and PMF internally generate source profiles from the ambient data. Puff Model: Quasi-instantaneous and short-term releases are frequently viewed as "puff" releases. A puff release scenario assumes that the release time and sampling times are very short compared to the travel time from the source to the receptor. Due to the limited data available to estimate the diffusion coefficients for puff diffusion, a number of models use the Pasquill-Gifford values. Since these coefficients were developed specifically for plumes, their use in puff models is questionable. In addition, most puff models assume a normal or Gaussian concentration distribution within the plume. This assumption overlooks the in-puff fluctuations. Plume Model: Continuous releases are generally modeled as a plume. The assumption here is that the release time is much greater that the time of travel from the source to the receptor. There are a number of approaches to modeling plumes, each with its own focus, assumptions, and limitations. These approaches can be categorized as: Gaussian plume models Meandering plume models Probability distribution function models K-thoery models Statistical models Similarity Models Second order closure and eddy simulation models Within these categories are a number of different models. Not all models using these approaches are at a developmental stage where they can be practicably applied, however. Some, like the statistical and second-order closure approaches, are too computer-intensive for routine use. Many of the other model types have little in the way of the field validation needed for application to real-world situations with confidence. Of the list, the most frequently used model types for odor modeling are the Gaussian model and the fluctuating plume-puff model. The Gaussian model of diffusion is the most widely used model for plume dispersion. Its most attractive feature is that it fits what we see and experience in the real world for a range of conditions. In addition, the mathematics of the model is fairly straightforward. On the other hand, Gaussian models need significant empirical input to be used for practicable dispersion estimates, making the model results highly dependent on the conditions of the sampling used to derive the empirical values. The basic assumptions of the Gaussian model are: Conservation of mass Continuous emissions Steady-state conditions Lateral and vertical concentration profiles are normal distributions Governing Equation The ambient air pollutant concentrations are determined by four factors: sources, transformation processes, transport processes, and removal mechanisms. The inputs to air quality models can be classified into two categories: meteorological data and source emissions. Note that topography (terrain and surface land use) is generally specified included within the meteorological data. Governing equation for pollution concentration: Ci C C C 2Ci 2Ci U i V i W i y Si z t x y z y 2 z 2 where Ci is the mass concentration of pollution, U, V, and W are the mean velocity components in the x-, y-, and z-direction, respectively; y and z are the dispersion coefficients for the lateral and vertical directions, and Si is the generation rate for pollutant. Therefore, the second to fourth terms are for transport processes, the first and second terms on the right hand side are for the dispersion due to turbulence and the last term is for source and transformation processes. Note that Si includes both sources and transformation processes; however, the removal mechanisms may be shown in the governing equation or the boundary conditions. For inert species at steady state, the governing equation can be simplified as U Ci C C 2Ci 2Ci V i W i y z x y z y 2 z 2 For flat terrain at stationary state, the equation is U because V W 0 and U is constant and x . U Ci Ci 2Ci 2Ci y z x y 2 z 2 Therefore, the solution for this y2 Q z2 exp equation is Ci . This is the Gaussian plume 2 2 2 2 2 U y z y z dispersion from a continuous and steady stack emission into a uniform and stationary domain. Methods to solve the partial differential equation can be found in Crank (1976) “The Mathematics of Diffusion.” Thus, the concentrations in the lateral and vertical directions are both normal distributions. For unsteady state and reactive species, numerical methods are used to solve the system of simultaneous partial differential equations. The method for chemical transformation processes for each pollutant can be divided into two different types: explicit chemical mechanism and lumped chemical mechanism. The chemical transformation processes for inorganic speices, like S-containing and N-containing species are generally computed using explicit mechanisms. However, lumped chemical mechanism is used for VOCs in the current reactive air quality models. For example, there are 51 species and 156 chemical reactions in CB05 mechanism. Types of Air Quality Models y 10 R 1 2 y 2 A. Gaussian plume models: X e V 2 y z 2 6 B. Puff model ( z H )2 ( z H2)2 2 e z e 2 z 2 C. Box models EKMA approach D. Lagrangian models (Forward- or Backward-trajectory analysis) 2580.00 43 2560.00 44 45 11 730 741 46 2540.00 47 12 2520.00 9 6 48 53 54 49 55 56 57 2500.00 59 8 50 74458 13 51 60 7 52 2480.00 2460.00 2440.00 61 120.00 140.00 160.00 180.00 200.00 220.00 240.00 E. Three-dimensional Grid models The horizontal scale of three-dimensional grid models can be up to several hundreds or even thousands kilometers and the vertical scale may be up to several tens kilometers. Therefore, both the horizontal and vertical coordinates are computed in various ways and their definitions are shown in the followings: Horizontal coordinates: Coordinate Map Parameters Map Scale (m) Lat.-long N/A N/A M=1 Lambert P 1 P 2 two lat. determine the projection cone. P 0 , central meridian P 0 , P 0 : lat. & long. of coordinate Mercator origin with in the tangent circle. Pr :angle between cylinder axis and the North m Note 1 sin( / 2 1 ) tan( / 4 / 2) sin( / 2 ) tan( / 4 1 / 2) sin( / 2 2 ) tan( / 4 2 / 2) n ln sin( / 2 1 ) tan( / 4 1 / 2) 2 ( x , x ) (long, lat) are in degrees 1 ( x cent , x cent ) (0 , 0 ) for the center of 1 1 2 coordinate system. ( x , x ) are in meters. 1 cos 0 m cos 2 ( x cent , x 2 cent ) (0 , 0 ) for the center of 1 2 coordinate system. ( x , x ) are in meters. polar axis. P 0 , P 0 : lat. & long. of the point of Stereo-graphic tangency. 2 Pr :angle from true north to x -axis 1 1 sin 0 m 1 sin ( x cent , x P is the UTM zone P , P not used m=1 cent ) (0 , 0 ) for the center of 1 2 coordinate system. ( x , x ) are in meters. 1 UTM 2 ( x cent , x 2 cent ) are offset from the UTM 1 2 coordinate origin. ( x , x ) are in meters. Vertical coordinates: 1. Height coordinate: suitable for representing surface and PBL parameterizations and time independent and intuitive 2. Pressure coordinate: suitable for describing weather; often used for hydrostatic atmosphere; and time dependant 3. Time independent terrain-influenced coordinate: Accounts for topography and time independent Terrain-influenced height coordinate - z z zsfc H zsfc Often used for non-hydrostatic atmosphere Terrain-influenced reference Pressure - po P Ptop Psfc Ptop Sigma-z with logarithmic transformation 4. Time-dependent terrain-influenced coordinates Hydrostatic pressure (normalized) - p 5. Step-mountain Eta coordinate P Ptop P sfc Ptop P Ptop Po ( zsfc ) Ptop P sfc Ptop Po ( zsfc ) Ptop p sfc Comparison of different vertical coordinates Comparison of scales for different types of air quality models E. Receptor Model The total concentration at a receptor site is the sum of the contributions from all sources. For example, Fetotal = Fesoil + Feauto + Fecoal +…. In general, the concentration of element i at the receptor site can be expressed as: m Ci f ij aij s j i 1,2,..... j 1 where Ci is the concentration of elemenet i, aij is the fraction of element i from source j, fij is the fraction representing any modification to the source composition aij due to atmospheric processes that occur between sources and receptor, and sj is the contribution from sources j at the receptor. Thus, the fijaij is the fraction of species i in any particular concentration from source j at the receptor. Generally, the value of fij is assumed to be one, that is, the source signature aij is not modified by atmospheric processes occurring between sources and receptors. Therefore, m Ci aij s j j 1 i 1,2,....., n US EPA Models The US EPA models are grouped below into four categories. Preferred and recommended models AERMOD - An atmospheric dispersion model based on atmospheric boundary layer turbulence structure and scaling concepts, including treatment of multiple ground-level and elevated point, area, and volume sources. It handles flat or complex, rural or urban terrain and includes algorithms for building effects and plume penetration of inversions aloft. It uses Gaussian dispersion for stable atmospheric conditions (i.e., low turbulence) and non-Gaussian dispersion for unstable conditions (high turbulence). Algorithms for plume depletion by wet and dry deposition are also included in the model. This model was in development for approximately 14 years before being officially accepted by the U.S. EPA. CALPUFF - A non-steady-state puff dispersion model that simulates the effects of time- and space-varying meteorological conditions on pollution transport, transformation, and removal. CALPUFF can be applied for long-range transport and for complex terrain. BLP - A Gaussian plume dispersion model designed to handle unique modelling problems associated with industrial sources where plume rise and downwash effects from stationary line sources are important. CALINE3 - A steady-state Gaussian dispersion model designed to determine pollution concentrations at receptor locations downwind of highways located in relatively uncomplicated terrain. CAL3QHC and CAL3QHCR - CAL3QHC is a CALINE3 based model with queuing calculations and a traffic model to calculate delays and queues that occur at signalized intersections. CAL3QHCR is a more refined version based on CAL3QHC that requires local meteorological data. CTDMPLUS - A Complex Terrain Dispersion Model (CTDM) plus algorithms for unstable situations (i.e., highly turbulent atmospheric conditions). It is a refined point source Gaussian air quality model for use in all stability conditions (i.e., all conditions of atmospheric turbulence) for complex terrain. OCD - Offshore and Coastal Dispersion Model (OCD) is a Gaussian model developed to determine the impact of offshore emissions from point, area or line sources on the air quality of coastal regions. It incorporates overwater plume transport and dispersion as well as changes that occur as the plume crosses the shoreline. Alternative models ADAM - Air Force Dispersion Assessment Model (ADAM) is a modified box and Gaussian dispersion model which incorporates thermodynamics, chemistry, heat transfer, aerosol loading, and dense gas effects. ADMS-3 - Atmospheric Dispersion Modelling System (ADMS-3) is an advanced dispersion model developed in the United Kingdom for calculating concentrations of pollutants emitted both continuously from point, line, volume and area sources, or discretely from point sources. AFTOX - A Gaussian dispersion model that handles continuous or puff, liquid or gas, elevated or surface releases from point or area sources. SLAB - A model for denser-than-air gaseous plume releases that utilizes the one-dimensional equations of momentum, conservation of mass and energy, and the equation of state. SLAB handles point source ground-level releases, elevated jet releases, releases from volume sources and releases from the evaporation of volatile liquid spill pools. DEGADIS - Dense Gas Dispersion (DEGADIS) is a model that simulates the dispersion at ground level of area source clouds of denser-than-air gases or aerosols released with zero momentum into the atmosphere over flat, level terrain. HGSYSTEM - A collection of computer programs developed by Shell Research Ltd. and designed to predict the source-term and subsequent dispersion of accidental chemical releases with an emphasis on dense gas behavior. HOTMAC and RAPTAD - HOTMAC is a model for weather forecasting used in conjunction with RAPTAD which is a puff model for pollutant transport and dispersion. These models are used for complex terrain, coastal regions, urban areas, and around buildings where other models fail. HYROAD - The Hybrid Roadway Model integrates three individual modules simulating the pollutant emissions from vehicular traffic and the dispersion of those emissions. The dispersion module is a puff model that determines concentrations of carbon monoxide (CO) or other gaseous pollutants and particulate matter (PM) from vehicle emissions at receptors within 500 meters of the roadway intersections. ISC3 - A Gaussian model used to assess pollutant concentrations from a wide variety of sources associated with an industrial complex. This model accounts for: settling and dry deposition of particles; downwash; point, area, line, and volume sources; plume rise as a function of downwind distance; separation of point sources; and limited terrain adjustment. ISC3 operates in both long-term and short-term modes. OBODM - A model for evaluating the air quality impacts of the open burning and detonation (OB/OD) of obsolete munitions and solid propellants. It uses dispersion and deposition algorithms taken from existing models for instantaneous and quasi-continuous sources to predict the transport and dispersion of pollutants released by the open burning and detonation operations. PLUVUEII - A model that estimates atmospheric visibility degradation and atmospheric discoloration caused by plumes resulting from the emissions of particles, nitrogen oxides, and sulfur oxides. The model predicts the transport, dispersion, chemical reactions, optical effects and surface deposition of such emissions from a single point or area source. SCIPUFF - A puff dispersion model that uses a collection of Gaussian puffs to predict three-dimensional, time-dependent pollutant concentrations. In addition to the average concentration value, SCIPUFF predicts the statistical variance in the concentrations resulting from the random fluctuations of the wind. SDM - Shoreline Dispersion Model (SDM) is a Gaussian dispersion model used to determine ground-level concentrations from tall stationary point source emissions near a shoreline. Screening models These are models that are often used before applying a refined air quality model to determine if refined modelling is needed. AERSCREEN - The screening version of AERMOD. It produces estimates of concentrations, without the need for meteorological data, that are equal to or greater than the estimates produced by AERMOD with a full set of meteorological data. AERSCREEN is still under development and is not currently available to the public. CTSCREEN - The screening version of CTDMPLUS. SCREEN3 - The screening version of ISC3. TSCREEN - Toxics Screening Model (TSCREEN) is a Gaussian model for screening toxic air pollutant emissions and their subsequent dispersion from possible releases at superfund sites. It contains 3 modules: SCREEN3, PUFF, and RVD (Relief Valve Discharge). VALLEY - A screening, complex terrain, Gaussian dispersion model for estimating 24-hour or annual concentrations resulting from up to 50 point and area emission sources. COMPLEX1 - A multiple point source screening model with terrain adjustment that uses the plume impaction algorithm of the VALLEY model. RTDM3.2 - Rough Terrain Diffusion Model (RTDM3.2) is a Gaussian model for estimating ground-level concentrations of one or more co-located point sources in rough (or flat) terrain. VISCREEN - A model that calculates the impact of specified emissions for specific transport and dispersion conditions. Photochemical models Photochemical air quality models have become widely utilized tools for assessing the effectiveness of control strategies adopted by regulatory agencies. These models are large-scale air quality models that simulate the changes of pollutant concentrations in the atmosphere by characterizing the chemical and physical processes in the atmosphere. These models are applied at multiple geographical scales ranging from local and regional to national and global. Models-3/CMAQ - The latest version of the Community Multi-scale Air Quality (CMAQ) model has state-of-the-science capabilities for conducting urban to regional scale simulations of multiple air quality issues, including tropospheric ozone, fine particles, toxics, acid deposition, and visibility degradation. CAMx - The Comprehensive Air quality Model with extensions (CAMx) simulates air quality over many geographic scales. It handles a variety of inert and chemically active pollutants, including ozone, particulate matter, inorganic and organic PM2.5/PM10, and mercury and other toxics. REMSAD - The Regional Modeling System for Aerosols and Deposition (REMSAD) calculates the concentrations of both inert and chemically reactive pollutants by simulating the atmospheric processes that affect pollutant concentrations over regional scales. It includes processes relevant to regional haze, particulate matter and other airborne pollutants, including soluble acidic components and mercury. References: US EPA website: www.epa.gov/ttn/scram Tonnesen G., J. Olaguer, M. Bergin, T. Russell, A. Hanna, P. Makar, D. Derwent, and Z. Wang (1999) Air Quality Models,