Window
advertisement

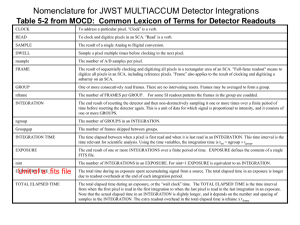
UCLA-COSMIC/1999-02 Optimization of OWL-AirWatch Optics & Photo-Detectors Katsushi Arisaka University of California, Los Angles Department of Physics and Astronomy Los Angles, California 90095 arisaka@physics.ucla.edu December 29, 1999 Abstract The OWL-AirWatch is a space-based, next-generation fluorescence detector to study ultra high-energy cosmic rays and neutrinos. It will require state-of-art mega-pixel photon detectors with a single photon detection capability. This document summarizes the general principle of the detector and the specifications of the photon detectors. Several possible candidates of photon detectors that satisfy such requirements are presented. This report (MS Word file, 1.4MB) is available at http://www.physics.ucla.edu/~arisaka/owl/arisaka_owl.doc -1- Table of Contents 1. Basic Concept of OWL -AirWatch Experiment . . . . . . . . . . . . . . . . . . 3 2. Derivation of Scaling Laws . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 2.1. 2.2. 2.3. 2.4. 2.5. 2.6. Formula for Signals Formula for Noise, SNR and Energy Threshold Formula for Photo-detectors Angular Resolution Covered Area and Aperture Summary 3. Expected Performance of Current Design . . . . . . . . . . . . . . . . . . . . . 11 3.1. 3.2. 3.3. 3.4. 3.5. Basic Principles of Detector Optimization Delta Launch Vehicles AirWatch Design Multi-OWL Design Comparison with Other Previous/Ongoing Experiments 4. Requirement of the Photo-Detectors . . . . . . . . . . . . . . . . . . . . . . . . . . 25 4.1. 4.2. 4.3. Physical Dimensions Signal Sensitivity Time and Other Properties 5. Comparison of Existing Photo-Detectors . . . . . . . . . . . . . . . . . . . . . . 31 5.1. Vacuum Based Devices 5.2. Solid State Devices 5.3. Hybrid Devices 6. Candidate Photo-Detectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 6.1. 6.2. 6.3. 6.4. Metal-channel PMT Flat Panel PMT Katsushi's Dream Detector Summary and R&D plan 7. Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46 -2- 1. Basic Concept of OWL -AirWatch experiment The OWL-AirWatch is a space-based, next generation fluorescence detector to study ultra highenergy cosmic rays and neutrinos. It is expected to achieve the following [Red Book]. 1) The aperture will be of order 106km2sr, an order of magnitude larger than the proposed Telescope Array and also two orders of magnitude bigger than the Pierre-Auger. 2) The energy threshold should be below 1020eV to study the energy spectrum around the ZGK cut off and above. 3) Good angular resolution of order ~ 1o is desirable. 4) Extremely large volume and aperture for neutrino events compared to any other previous experiments for the energy around and above 1020eV is expected. The baseline design shown in Figure.1 is currently under consideration. Owl-AirWatch Detector Cosmic Ray FOV 60o H 500km Cosmic Ray Shower Ground Atmosphere (~10km) 600km Figure.1 Basic concept of OWL-AirWatch experiment 1) A satellite will be launched most likely by a Delta III rocket to a trajectory of ~500km high. 2) It consists of a wide Field-of-View (~ 60o), large area (2~5m diameter), light collector made by a mirror or a Fresnel lens. 3) Each photon detector views ~ 1km by ~1km of the atmosphere. -3- Such a space-based detector has the following major advantages over the ground-based, cosmic ray detectors such as Fly's Eye, HiRes or proposed Telescope Array. 1) Fluorescence photons propagate mostly in vacuum space. Thus attenuation by atmosphere is much less than the case of the ground-based detectors. 2) Distance from signals to a detector is the same within a factor of two, wherever cosmic rays hit in the detector aperture. Thus the conversion factor from signal to energy is more or less constant, unlike the ground detectors where a huge correction of 1/R2 (as well as correction for atmospheric attenuation) is mandatory. It means uniform, well-defined energy threshold can be easily achieved. The dynamic range required for readout is also directly related the dynamic range of signals of interest. 3) The boundary of the detector aperture is simply defined by the Field of View of the wideangle optics, independent of the energy of the cosmic rays unlike ground-based detectors where it is energy dependent and, to some-extent, atmospheric-condition dependent. 4) Signals are precisely registered at (t, x, y, z = 0) when cosmic ray showers hit the ground. This solves the ambiguity of direction inside of the Detector Shower Plane (DSP). Therefore stereo-view is unnecessary unlike the ground-based detectors. As a matter of fact, one can consider data samples in the OWL-AirWatch as charged particle tracks measured by a TPC (Time Projection Chamber) in high-energy experiments. A sampling rate of 1MHz (i.e. 1sec clock speed) corresponds to 300m sampling in space, which is adequate. 5) We observe only photons emitted backwards. Thus contamination by Cherenkov lights is negligible, unlike ground-based detectors. Actually the Cherenkov light will be detected from the reflection on the ground after the shower front collides on it. This can be used as a powerful time stamp described above. 6) By changing the altitude of the OWL, we can optimize the aperture and the energy threshold rather easily. Both aperture and energy threshold increase with OWL altitude. On the other hand, there are some disadvantages. The distance from the space, ~500km, is at least ten times longer than the distance from ground-based detectors. Thus attenuation by 1/R2 is expected to be two orders of magnitude larger. In addition, limited size of mirrors would make the signal size even smaller. Therefore careful optimization of optics and photon detectors is most critical to ensure the good sensitivity for interesting physics. This document first describes the basic relation between geometry/optics and the expected signal, the noise level as well as the angular resolution. Several useful analytical formulas will be introduced as scaling laws in terms of detector parameters. These formulas are the basis for a detailed comparison of various photo-detector candidates. -4- 2. Derivation of Scaling Laws 2.1 Formula for Signals Generally speaking, the fluorescence signal, S, at the shower-max, generated by the cosmic ray of energy E (eV), detected by a photon detector (in unit of photo-electron), is given by the following [HiRes]. S ( pe) 4220( photons) E (eV ) ( R) AT 2 (km2 / m 2 / n sec) 20 10 R (1) Where A (m2) is the area of the light collector, is the quantum efficiency, T (nsec) is the gate width, R (km) is the distance from the signal source to the detector, (R) is the correction factor for light attenuation from the source to the surface of the photon detector. To apply this formula to the OWL-AirWatch configuration, let's consider a cosmic ray shower with the incident angle of from the zenith, and angle measured from the R-vector. As shown in the figure below, let's assume that: the height of the satellite is H (km), the view angle from the detector to the cosmic ray shower (measured from the zenith) is , each photo-detector has a field of view of , the physical track length inside of is Ltrack, the track length projected onto the plane perpendicular to the R-vector is L. Owl-AirWatch Detector R H Ltrack Ground Cosmic Ray Shower L Figure.2 Various geometrical parameters between the OWL-AirWatch and Cosmic rays. -5- Table.1 below summarizes the notation of parameters and their default values in the following analysis. Notation Default Value Energy of Cosmic Ray E 1020 eV Satellite Height from the ground H 500km FOV 60o D 3m fstop 1.0 R - R 0.5 The incident angle the cosmic ray from the zenith Viewed angle from the detector to the cosmic ray shower (measured from the zenith) Incident angle of the cosmic ray (measured from the R-vector) - - - Field of View of Photo-detector Pixel 0.1o Quantum Efficiency of Photo-detector 0.2 Integration Time of Flash ADC T 1sec Parameter Description Total Field of View the detector mirror Diameter of Mirror F-stop of Mirror Distance between the Cosmic-ray Shower and the Detector Light Attenuation Factor after traveling the distance R Table.1 Notation of parameters and their default values There are several simple geometrical relations such as, H cos , R L cos 2 sin , Ltrack L . R (2) Taking these relations and A D 2 4 (where D is the diameter of the mirror), the signal given by Equation (1) is conveniently expressed by, E 500km D ( R) T 11.8( pe) cos 20 10 eV H 3m 0.1 1 sec 2 S T 2 -6- 2 (3) Furthermore, once the shower traveling time in the FOV is integrated over, T can be taken as Ttrack Ltrack L R H . c c sin c sin c cos sin 1 H 2.9( sec) cos sin 500km 0.1 (4) Here, c is the speed of light ( c 0.3km / sec ). The track length in , Ltrack, is also given by Ltrack 870(m) 1 H cos sin 500km 0.1 (5) The projected length of Ltrack onto the plane perpendicular to R-vector is simply, L 870(m) 1 H cos 500km 0.1 (6) Using Equation (4) for T in Equation (1), one can obtain the following expression as well. S 4220( photons) E (eV ) FOV ( R) A (km2 / m 2 / n sec) 20 c sin R 10 cos E 500km D ( R) 34.2( pe) sin 10 20 eV H 3m 0.1 0.1 2 (7) 2.2 Formula for Background, SNR and Energy Threshold The dark sky noise has recently been measured by the Italian AirWatch group by a balloon flight, which is ~400 photons/m2/sr/nsec [Catalano]. Considering the area A(m2), the single pixel solid angle (deg2) and integration time of T (nsec), then the background noise level, B, is given by, B( pe) 0.12( photons) AT(m 2 / n sec/ deg 2 ) . This can be re-expressed by, D T 1.7( pe) 3m 0.2 1 sec 0.1 2 BT -7- 2 (8) The important criterion to separate signal from noise is the Signal to Noise Ratio (SNR). Generally speaking, SNR is given by S . In the simplest case, has two contribution: Poisson statistics of signal itself, signal S , and Poisson statistics of the dark sky noise, dark B . Thus, signal2 dark 2 S B SNR S S SB (9) Once the signal becomes significantly larger than the noise, SNR simply becomes 1 result, the SNR (after T of integration) can be expressed by, 500km D E ( R) T SNRT 3.4 cos 20 H 3m 10 eV 0.1 1 sec S . As a (10) One can solve the above equation in terms of energy to obtain a formula for the energy threshold. Assuming that typical SNR required to distinguish signals from noise is 2 (i.e. 4 photoelectrons), the energy threshold, Eth, is given by, 2 2 1 SNR H 3m Eth 3.4 1019 eV 2 2 cos 500km D 2 0.1 1 sec ( R) T (11) 2.3 Formula for Photon Detectors The pixel size of the photon detector, detector(mm), is given by, d etector f stop D f stop D 5.2(mm) 1 3m 0.1 (12) Here, fstop is the f-number of the mirror. The overall dimension of the photon detector area, Detector, is given as a function of the FOV by, Detector f stop D FOV f stop D FOV 3.1(m) 1 3m 60 (13) -8- Lastly, the number of pixels of photon detector is simply given by, FOV # Pixels 4 2 FOV 0.1 2.8 10 5 60 2 (14) 2 2.4 Angular Resolution Angular resolution is one of the most important factors in Astronomy to identify point sources. In case of the Owl-AirWatch, it is given by the accuracy of track reconstruction. Roughly speaking, it is related to the accuracy of the track width measurement, width, divided by the observed track length, Ltotal. (i.e. width ). Ltotal What is width? In the Owl-AirWatch experiment, it is determined by the Field of View of the photon-detector pixel size in one direction, and by the clock speed of the Flash ADC in the other direction. These discrete measurements give a three-dimensional box in space, given by L L LT. Therefore a typical value of width is given by, width Lwidth , 2.3 Lwidth 2L LT . 2 2 In addition, it is necessary to take into account the multiple data samples. With #hits, the resolution is expected to improve by a factor of # hits . However the hits near the center of the shower track make little contribution to the angular resolution. Thus it is reasonable to reduce the effective number of hits by 2/3 or so. Finally, the angular resolution is given by, Lwidth Ltotal 2.3 # hits 0.7 Ltotal . Lwidth By combining the above three equations, one can derive the following formula for the angular resolution. Here, the number of hits is roughly given by # hits 2L 2 L 2 T 0.52rad Ltotal 3 2 (15) -9- 10km , where is the zenith angle of the cos Cosmic ray shower. Under the condition of LT L (which can be satisfied by speeding up the FADC clock), Equation (15) becomes, As the final step, Ltotal can be replaced by Ltotal 3 L 2 1.3 cos 1km cos H 1. 2 cos 500km 0.1 (16) 3 2 If our design goal is = 1o for H = 500km (for small angles and ), the requirement on the detector parameters would be L < 840m and < 0.089o. 2.5 Covered Area and Aperture The whole area viewed by the detector can be expressed as a function of the Field of View of the whole detectors, FOV, as shown below. Area H tan FOV 2 2 H tan FOV 2 2.6 10 (km ) 500km tan 30 2 5 2 2 (17) The aperture is the Area times the solid angle, where the typical solid angle of a fluorescence detector such as Fly's Eye is approximately steradians. Thus the aperture is given by, Aperture Area(km2 str ) . A typical duty factor of the ground-based fluorescence experiment is an order of 10%, because it is only operational during the moon-less, clear night. Since a space based experiment overviews the sky underneath, wherever it goes (including over the bright cities or cloudy sky), the duty factor might be somewhat lower. But let's assume 10% duty factor, the effective aperture becomes, Apertureeff 0.1 Area 0.32 Area (18) Duty _ factor Area 3.2 10 5 (km 2 str ) 6 2 0.10 10 km - 10 - One of the prime goals of the OWL-AirWatch experiment is the detection of ultra high-energy neutrino interactions. The target volume for neutrino interactions is, in fact, enormous. It is convenient to express the weight of the atmosphere in terms of water equivalent volume in unit of km3, because people are taking about 1km3 size detector such as the ICECUBE for the next generation neutrino astronomy. Since the atmosphere is equivalent to a 10m thick layer of water, the target volume for neutrino, Volume, and effective volume including the duty factor, Volumeeff, is given by, Volume 0.01 Area(km3 ) (19) Volumeeff 1 10 3 Area(km3 ) Duty _ factor Area 100(km3 ) 6 2 0.10 10 km (20) 2.6 Summary In summary, Table.2 below shows various scaling laws with the notation in Table.1. These formulas will be used for detector optimization in later sections. 3. Expected Performance of Current Design 3.1 Basic Principles of Detector Optimization There are three basic physical quantities of prime interest: 1) Effective Aperture (after the correction of duty factor) should be at least ten times larger than the Auger or the Telescope Array. Since they have about 7,000km2str, the goal of the OWL-AirWatch should be 70,000 km2str or more. 2) Energy threshold should be well below 1020eV. It is desirable to keep it lower than the GZK cut off energy of ~31019eV. Such a low energy threshold ensures the detection of the shoulder of the power spectrum around the cut-off energy, which provides a decisive calibration point of the absolute energy scale. 3) Angular resolution should be better than 1o, as 1o is the design value of the Auger experiment. The default values in Table.1 and 2 have been chosen by considering these requirements and their technical feasibility as of today. As a matter of fact, if one takes the default values as listed, the Effective Aperture is 83,000km2str, the Energy threshold is 3.41019eV and the Angular resolution is 1.2o. Although the angular resolution is rather poor and the threshold is a bit high, the default values in Table 2 more or less satisfy our design goals. - 11 - Parameter Description Photo-detector Pixel Dimension Dimension of Photodetector Total Area Formulas f stop D d etector 5.2(mm) 1 3m 0.1 f stop D FOV Detector 3.1(m) 1 3m 60 Track Length in T (= cT ) Track Length in L 870(m) Shower Max Signal at E = 1020 eV in T E 500km D S T 11.8( pe) cos 2 20 10 eV H 3m 2 Total Number of Pixels 2 FOV 0.1 # Pixels 2.8 10 60 T LT 300(m) 1 sec 5 1 H cos 500km 0.1 2 2 ( R) T 0.1 1 sec cos E 500km D ( R) 34.2( pe) sin 10 20 eV H 3m 0.1 0.1 2 Shower Max Signal at E = 1020 eV in S Dark Sky Noise D T BT 1.7( pe) 3m 0.2 1 sec 0.1 SNR in T (for B << S) 500km D E ( R) T SNRT 3.4 cos 20 H 3m 10 eV 0.1 1 sec Energy Threshold 1 SNR H 3m Eth 3.4 10 eV 2 2 cos 500km D Angular Resolution (for LT << L) cos H 2 1.2 cos 500km 0.1 2 2 2 2 19 2 0.1 1 sec ( R) T 3 Area viewed by the Whole Detector Effective Aperture Effective Neutrino Target Volume H tan FOV 2 Area 2.6 10 (km ) 500km tan 30 Duty _ factor Area Apertureeff 3.2 10 5 (km 2 str ) 6 2 0.10 10 km Duty _ factor Area Volumeeff 100(km3 ) 6 2 0.10 10 km 2 5 2 Table.2 Summary of useful scaling laws - 12 - 2 3.2 Delta Launch Vehicles Unlike ground base experiments, a space-based experiment must be launched either by a rocket or a Space Shuttle. This fact severely constrains the size, weight as well as power consumption. Thus before we discuss the current baseline design of the OWL-AirWatch detector, I would like to review a possible launch vehicle and its constraint. Standard Launch Vehicles as of today are Delta Rocket series by the Boeing Company. Among them, recently developed Delta III is the largest and the most advanced one with reasonable launch cost. Its technical information is available in [Delta III]. Table 3 from this document shown below is typical Mission Capabilities. It can launch up to 8,292kg of a spacecraft to LowEarth Orbit (LEO), or 3,810kg to Geosynchronous Transfer Orbit (GTO). Figure 3 shows the Delta III spacecraft envelope with 4.0-m (13.1-ft)-diameter fairing for twostage configuration. As is shown here, the largest available diameter for optics is 3.75m without deployable (or inflatable) mechanism. Table.3 Typical Delta III Mission capabilities (from [Delta III] ) - 13 - Figure.3 Delta III Spacecraft Envelope, 4.0-m (13.1-ft)-dia Fairing, Two-Stage Configuration - 14 - Figure.4 Delta III Vehicle, Two-Stage Circular Orbit Altitude Capability Figure. 5 Typical Delta III LEO Mission Ground Trace - 15 - Figure 4 shows relation between the circular orbit altitude (in km) and the spacecraft mass (in kg). Even with one-burn direct insertion method, more than 5000kg can be launched to the low orbit of 500km. With two-burn Hohmann Transfer, the Delta III is capable of launching more than 7000kg. Lastly, Figure 5 shows a typical ground trace of the Low-Earth Orbit (LEO) mission, after launched from the Cape Canaveral Air Station in Florida. The latitude stays within +-30 degree. In the following section, two existing designs, the AirWatch and the Multi-OWL will be analyzed by applying the scaling laws to see how well these designs perform. 3.3 AirWatch Baseline Design One of the working examples is the baseline design currently under consideration jointly by the Italian, AirWatch group and the US OWL group. The detector concept is shown in Figure 6. Their parameters are listed in Table.4. The optics system is currently under extensive optimization by David Lamb and others at University of Alabama, Huntsville [Lamb]. According to their latest study, the optics consists of double Fresnel lenses of 3.5m diameters and a 2.5m-diameter entrance pupil. The F-stop is 1.3, which gives the focal plane diameter of 3.36m. We are still trying to make the diameter of the entrance pupil as large as possible, and the f-stop number as small as possible, while maintaining the reasonable image size (i.e. 0.1o) for the wavelength of our interest. A possibility of flat Fresnel lenses and flat focal plane has been considered as well. However such simplification appears to degrade the image quality to unacceptable range, especially with a small f-stop number. One can see that the current dimensions are carefully chosen from a practical point of view. With light attenuation factor of 0.5, the expected signal at E = 1020eV is 5.6 photoelectrons per FADC gate width of 833nsec. Actually the traveling time of air showers on each pixel is longer than the L 974m FADC gate and given by Ttotal 3.2 sec c 300m / sec If one takes this in the above calculation, the signal in one pixel at shower maximum becomes 22 photoelectrons, which is clearly detectable without any doubt. The angular resolution is poorer than we wish. This is primary due to the large pixel size 7mm that is given by the dimension of the existing photon detector (shown later). In any case, the optics simulation shows that it is difficult to achieve a significantly smaller spot size than this value due to various constraints. On the other hand, the number of pixels is reduced to 200k, which helps to reduce the weight and power consumption of the focal plane. The effective aperture is 83,000km2str assuming 10% duty factor. Our intention is not to compromise this size, as it is our primary interest to cover at least ten times larger area than the Auger or the Telescope Array. - 16 - Deployable Light Shield 4m Fresnel Lens Entrance Pupil Shutter Calibration Light Source 4m Fresnel Lens Focal Plane Battery/Electronics etc. etc. Payload Attach Fitting etc. Deployable Solar Panels etc. 3.5m Figure.4 Conceptual design of the baseline OWL-AirWatch detector - 17 - Notation AirWatch Double Fresnel H 500km FOV 60o Diameter of Entrance Pupil D 2.5m Diameter of Fresnel Lens - 3.5m fstop 1.3 0.2 cos 2 R 0.5 Integration Time T 833nsec Field of View of Photo-detector Pixel 0.11o Photo-detector Pixel Dimension detector 7.0mm Dimension of Photo-detector Total Area Detector 3.3m Total Number of Pixels #Pixels 200K Track Length in (at = 90o) L 974m Track Length in T (= cT ) LT 250m Shower Max Signal at E = 1020eV (in T) ST 5.6pe Shower Max Signal at E = 1020eV (in ) S 22pe Night Sky Noise (in T) BT 1.3pe SNRT 2.4 Energy Threshold (for SNR = 2) Eth 7.11019eV Angular resolution 1.4o Area 2.6105km2 Effective Aperture Apertureeff 8.3104km2str Effective Neutrino Target Volume Volumeeff 260km3 Parameter Description Satellite Height Total Field of View F-stop of Mirror Quantum Efficiency Light Attenuation Factor Signal to Noise Ratio at E = 1020eV (in T) Area Viewed by the Whole Detector Table.4 Baseline Parameters of AirWatch Detector under consideration. - 18 - 3.4 Multi-OWL Design An idea of Multiple OWLs has been proposed by Y. Takahashi as the way to expand the Field of View by another order of magnitude from the Single-OWL [Takahashi]. It would consist of six OWL-AirWatch detectors at the orbital height of ~1000km as shown below. The axis of each detector would be tilted by 30o from the zenith. As a result, the overall Field of View of such a detector array would expand to 120o. As shown in Figure 6, thanks to the finite size of the Earth, the Multi-OWL would cover the entire horizon seen by the detector. As a result, the area coverage and the aperture become remarkably large. On the other hand, there are several shortfalls. 1) Unless much larger mirrors are deployed, due to its high altitude as well as 1/R2 factor, Energy threshold would become too high. 2) Events near the horizon would be too far, and the time stamps of (t, x, y, z = 0) no longer provide strong constraint of the event geometry due to a poor measurement of x or y. In other words, the situation becomes similar to the ground-based detector. 3) Because of large 1/R2 factor, event quality (such as energy and angular resolutions) would change depending on R. To compensate for these shortfalls, the following modifications over the single OWL/AirWatch are required. 1) To maintain the angular resolution, the pixel size must be reduced by more than a factor of two. 2) Diameter of mirror needs to be enlarged, say, to the order of 5m. 3) It is highly desirable to develop new type of photon detectors with high quantum efficiency as high as 50% (as described in Section 6.3). For the three dimensional reconstruction of neutrino events, we might want to arrange the six OWLs in stereo view as shown Figure 7. - 19 - Multi-OWL Detector H=1000km 60o 6680km R=6380km 30o 30o Earth Side View 3340km Top View Figure.6 Concept of Multi-OWL consisting of six OWLs at 1000km high. - 20 - Multi-OWL Detector 60o H=1000km 2000km R=6380km Earth Side View 3500km 2000km Top View Figure.7 A possible stereo view arrangement of six OWLs at 1000km heigh - 21 - Parameter Description Notation Number of Detectors Satellite Height Total Field of View Effective Diameter of Mirror F-stop of Mirror Quantum Efficiency Light Attenuation Factor Integration Time Field of View of Photo-detector Pixel Photo-detector Pixel Dimension Dimension of Photo-detector Total Area Total Number of Pixels Track Length in (at = 90o) Track length in T (= cT ) Shower Max Signal at E = 1020 eV (in T) Night Sky Noise (in T) Energy Threshold (for SNR = 2) Angular resolution Area Viewed by the Whole Detector Duty Factor Effective Aperture Effective Neutrino Target Volume (Water eq.) N H FOV D fstop Single-OWL Low 500km 1000km Area Duty_factor Apertureeff Volumeeff 60o 60 2.5m 1.3 0.2 0.5 833nsec 0.11o 7mm 3.3m 200K 974m 1.95km 250m 5.6pe 1.8pe 1.3pe 19 7.110 eV 1.4o 2.6105km2 2.81020eV 3.8o 1.0106km2 10% 8.310 km str 3.3105km2str 260km3 1040km3 4 2 120o 5m ( 6) 1.0 0.5 0.05 ~ 0.5 833nsec 0.036o 3.2mm 5m ( 6) 15M 630m ~ 1.3km 250m 7 ~ 17pe 0.2 ~ 17pe 1.3pe 19 2~510 eV 2~201019eV 0.74o 0.74 ~ 5.6o 5.5106km2 2.5107km2 10% 6 2 1.810 km str 8.0106km2str 5,500 km3 25,000 km3 Table.5 Baseline Parameters of proposed Single- and Multi-OWL detector. - 22 - Multi-OWLs Mono 6 1000km o cos R T Multi-OWLs Stereo 1 2 detector Detector #Pixels L LT ST B Eth Single-OWL High Table.5 is the baseline parameter of Single- and Multi-OWLs with various configurations. For Single-OWL, I assumed two different heights: 500km and 1,000km. For Multi-OWLs, I assumed two different configurations shown in Figure.6 and Figure.7. At the same time, the mirror diameter and the quantum efficiency are increased to 5m and 50% respectively, hoping that such technology will become feasible when time comes. As a result, the energy thresholds are maintained to be around 1020eV, and angular resolution is maintained to be an order of 1o. The aperture is progressively improved step by step. 3.5 Comparison with Other Previous/Ongoing Experiments. Finally we are ready to compare the OWL-AirWatch experiment with other similar experiments. Table. 6 shows such comparison between past, ongoing and future experiments. Several remarks can be made: 1) Even at low altitude of 500km with single detector, the OWL has more than ten times larger effective aperture than the Auger or Telescope Array. 2) In each step of OWL, the aperture is enlarged by a factor of five. Monocular operation of the Multi-OWL at 1,000km provides the effective aperture of 8,000,000km2str; 1,000 times larger than the Auger (or TA) and 100 times larger than the single OWL at 500km. This clearly demonstrates that the OWL is the open-ended project with many possibilities and improvements. 3) The energy threshold of the OWL is several times higher than that of the Auger or TA. The Auger and TA will systematically study the Energy spectrum just below GZK cut off and around the cut off. Thus the OWL is optimized to study the spectrum above the GZK cut off, after the super GZK events are established by the Auger and TA. 4) The angular resolution of the OWL is comparable to other experiments, thanks to the small pixel size which effectively views the same segment of atmosphere; an order of 1km square. In summary, it is safe to say that the OWL is a well-thought, next-generation experiment after the Auger and TA with an order of magnitude larger aperture. - 23 - Experiments Method Notation Covered Area Duty Factor Area Unit Effective Aperture - Apertureeff Effective Energy Neutrino ThreVolume shold Volumeeff Eth Angular Resolution Cost Start Year - - km2 % km2str km3 eV degree $M - Fly's Eye Fluorescence 300 10 100 0.2 ~1017 ~0.5o ~0.5 1986 AGASA Ground 100 100 250 0.1 ~1017 ~1o ~1 1992 HiRes Fluorescence 3,000 10 700 1.0 ~1018 ~0.5o ~5 1999 Auger (one-site) Ground 3,000 100 7,000 3.0 ~1019 ~1o 2004 ~50 Auger (hybrid) Hybrid Telescope Array Fluorescence ICECUBE Cherenkov 3,000 10 700 0.3 ~1019 ~0.5o 21,000 10 6,000 21.0 ~1019 ~0.5o ~80 ~2005 - 100 - 1.0 ~1012 ~1o ~80 ~2005 2004 (1019) OWL Single, Low Fluorescence 260,000 10 83,000 260.0 ~7 ~1.4o Single, High Fluorescence 1,040,000 10 330,000 1,040.0 ~28 ~3.8o Multi, Stereo Fluorescence 5,500,000 10 1,800,000 5,500.0 2~5 ~0.7o ~2006 ~200 ~2008 ? ~1000 Multi, Mono Fluorescence 25,000,000 10 8,000,000 25,000.0 2~20 0.7~6o Table.6 Comparison between various past, ongoing and future experiments - 24 - ? 4. Requirement of the Photo-Detectors Developing photo-detectors of the OWL-AirWatch is technically one of the most challenging projects of its own. It is basically a mega-pixel devise that covers several meter-squares of the area. It must have single photoelectron sensitivity as well. This section goes through the basic specifications in some details. 4.1 Physical Dimensions The pixel size determines the sampling rate of cosmic-ray showers. As is shown in the Table.2, it is primarily related to the angular resolution of the shower reconstruction. If one requires angular resolution of = 1o, from Equation (16), the requirement on the field of view of each pixel becomes, 0.11 cos 500km cos H 1 (21) By inserting this into Equation (10), one can obtain the formula for the optimal pixel size. d etector 6.0(mm) cos f stop D 500km cos 1 3m H 1 (22) The sampling rate is also important for the reconstruction of the shower profile which is related to the energy resolution and determination of the Shower Maximum position. An order of L =1km sampling rate is desirable, and it actually gives the similar requirement as Equation (19), shown below. 500km L 0.11 cos H 1km (23) In addition to above optical consideration, the following mechanical specification are of great importance. 1) Minimum dead space. For a continuous field of view, dead space between pixels as well as photo-detector modules must be minimized. Generally speaking, dead space between pixels is easy to reduce, but between modules is difficult due to mechanical structure. Less than 10% area is desirable, but 20% would be acceptable, assuming one module consists of large number (>64) of pixels. - 25 - 2) The weight is a major concern in space. Assuming the total weight of the detector is an order of three tons, and allowed weight for photon detector is less than 10% of total weight (i.e. less than 300kg) , the weight per pixel should be less than 1.5gram. To be conservative, less than 1gram per pixel seems more desirable. 3) The focal plane is likely to be curved, either concave or convex depending on optics. Its curvature is not severe, but the photo-detector unit must be flexible enough to follow the curvature. 4.2 Signal Sensitivity In the ideal case, Poisson Statistics of the number of observed photons governs the Signal to Noise Ratio (SNR) of photo-detectors. SNR S S pe S pe S pe . (24) In reality, however, several modifications to this equation are need. 1) We must consider the Poisson statistics of the collected photoelectrons. The number of photo-electrons, Spe, is given by S pe C ol S , where is the quantum efficiency, Col is the collection efficiency for photoelectrons and S is the number of incident photons. 2) The Poisson statistics is further modified by the Excess Noise Factor (ENF). ENF is defined as the increase of the 2. (i.e. output2 = ENFintput2). In case of photon detectors, the ENF is given by the formula below, where n stands for the multiplication factor of the n'th dynode. As shown later, for typical PMTs, n is 5~10, while it is about two for the fine mesh and MCP. As for solid-state device, the photo diode has ENF of one, but the APD has two or greater than two. 1 1 1 ENF 1 (25) 1 1 2 1 2 n 3) Lastly, there is an additional contribution from the Equivalent Noise Charge (ENC). A typical amplifier has about 1000e- of ENC. This noise must be normalized by the gain of the photo-detector, G so that it can be compared in the unit of photoelectrons. Taking all these factors into account, Equation (9) and (25) must be combined and modified as follows. - 26 - 2 signal2 dark 2 ENC 2 signal ENF C ol S (26) dark ENF C ol B ENC ENC G Here B is the incident photons caused by the dark sky noise. By substituting (26) into (24), SNR becomes, SNR S pe signal dark 2 ENC 2 2 (27) Col S ENF C ol ( S B ) ( ENC G ) 2 In physics experiments, the energy resolution is commonly used instead of the SNR, and it is given by, 1 E SNR ENF C ol ( S B ) ( ENC G ) 2 Col S (28) From Equation (27) and (28), one can conclude the following. 1) In order for (ENC/G)2 to be negligible, the intrinsic gain of the photo-detector (G) must be much larger than the readout noise (ENC). A typical ENC is an order of 1,000e- for fast integration (<100nsec), and about 300e- for slow integration (~1sec). Thus the Gain must be at least 3,000. Higher than 10,000 is more desirable to be conservative. 2) The dark sky noise (B) must be significantly smaller than the signal (S). To be safe, let's assume that B < S /3. From Equation (3) and (8), this condition can be expressed by, 500km E ( R) 0.09 cos 20 H 10 eV 0.5 (29) It is interesting to see that Equation (29) actually coincides with the requirement from the angular resolution of 1o given in Equation (21) and (23). Once the above conditions, 1) and 2) are satisfied, Equation (27) can be simplified to, SNR Col S (30) ENF - 27 - At this point, to achieve superior sensitivity, the following becomes very important. 3) Quantum Efficiency () and Collection Efficiency (Col) must be as high as possible. Generally speaking, Quantum efficiency is the single most important parameter of the signal detection in any apppication. Although the higher the better, 25% is the practical number based on conventional bi-alkali photo cathode. With a solid state photo-cathode, it is expected to be improved to 50% level in the near future. 4) Excess Noise Factor (ENF) must be as close as possible to unity. From our previous experience, to clearly observe single photoelectron peaks, it must be smaller than 1.1. In addition, there are several requirements so that inherent sensitivity is not compromised. 1) The window glass must be transparent to the UV fluorescence light from Nitrogen excitation, whose wavelengths are 337, 357 and 397nm. 90% transmittance is desirable and 80% is the minimum requirement. 2) The intrinsic dark pulse rate should be much less than the dark sky noise rate, which is typically 1MHz. The order of 10kHz would be good. 3) Pixel to pixel uniformity of photo-cathode and photoelectron collection efficiency must be reasonably good; fluctuation less than 10% is desirable, and 20% is the maximum tolerance. 4) Anode uniformity (i.e. Gain uniformity) on the other hand is less important, since the detector can count the number of photoelectrons, as far as the single photoelectron level is calibrated pixel by pixel. Less than 20% non-uniformity is desirable, but up to 50% can be tolerated in our past experience (such as RICH detector at HERA-B). 5) Cross talk between pixels should be reasonably small. Less than 2% is desirable, but 5% can be tolerated. 6) Only modest dynamic range (pulse linearity) is required. The largest signal with a ~1sec gate would be 1,000 photoelectrons or so. With another order of magnitude of safety factor, linearity up to 10,000 photoelectrons level desirable. 4.3 Other properties In addition to the above specifications, the following items need to be considered. 1) As far as response speed such as rise time, fall time and pulse width are concerned, the requirement comes from the fact that the readout electronics requires photon counting. A study by the Italian group shows that shorter than 10nsec pulse width is required [Catalano]. Typical time response of photomultipliers satisfies this requirement. - 28 - 2) Power consumption by the HV power supply is a major concern specific to space based experiments. Assuming total power of 1KW in whole detector and a 10% allowance for photon detectors, power budget per pixel is 1kW 0.1 500 W . 2 10 5 3) After-pulses should not contribute to the signal level. Lass than 1% are desirable. 4) Long-term stability for 10 years operation is required. Since the expected dark sky noise level is of order 2MHz, the cathode dark current is 1.6 10 19 C 2 10 6 / sec 0.32 pA / pixel . Assuming Gain of 106, the anode dark current is given by, G I dark 320nA / pixel 6 10 The dark pulse rate and the dark current of photon-detector itself should be kept much lower than this level. Assuming 10 years of operation with 20% duty factor, the accumulated charge per pixel is, T Duty _ factor G Q 2Coulomb / pixel 6 . 0.2 10 10 years 5) The total cost of photon detectors must be reasonable. Assuming $10M total is acceptable, the cost per pixel should be less than $50. Based on the argument above, specifications for photon detectors can be summarized as shown in Table 6. - 29 - Parameter Description Notation Pixel Size Total Number of Pixels Total Photo-Cathode Area Physical Dimension of One unit Window Transparency at 350nm detector #Pixels Acathode Dunit - Weight per Pixel Dead Space W Quantum Efficiency Cathode Non-uniformity Anode Non-uniformity Photo-electron Collection Efficiency Cross Talk between Pixels Excess Noise Factor Intrinsic Gain Specifications Minimum Ideal ~ 6mm ~ 2 105 ~ 9m2 > 2.5cm > 5cm > 80% > 90% < 1.5gram < 20% < 1gram < 10% Col ENF G > 20% < 20% < 50% > 80% < 5% < 1.1 > 3,000 > 50% < 10% < 20% > 90% < 2% 1.0 > 105 Dynamic Range Equivalent Noise Charge ENC ~1,000 < 1000e- ~10,000 < 300e- Transit Time Spread for Single Photo-electron Rise Time and Fall Time Pulse Width Readout Speed per Detector Unit (16~64ch) Intrinsic Dark Current per Pixel Intrinsic Dark Pulse Rate per Pixel After Pulse TTS Idark - < 1nsec < 5nsec < 10nsec < 0.5nsec < 2nsec < 5nsec - Life Time Power Consumption of HV Power Supply per Pixel Cost per Pixel - <1sec < 1nA < 10kHz < 1% >10 Years < 500W < $50 Table.7 Specifications for the OWL-AirWatch photo-detectors. - 30 - < 200W < $20 5. Comparison of Existing Photo-Detectors Before we go into specific photon detector candidates, it is probably a good idea to systematically survey various types of existing and recently developed photon detectors. Detailed discussion can be found by my review talks in several detector conferences listed in [Arisaka.1, Arisaka.2]. In table 8, I have listed all possible detector candidates, together with required specifications in the OWL-AirWatch for convenience. Photon detectors can be categorized in three groups: Vacuum based, Solid State and Hybrid. The parameters of candidates are typical values and not necessary optimized for our specific application. A good value is highlighted by Bold, and a fatal value is highlighted by Underline in the Table 8. At the end of the table, each detector is graded by A to F. A detector with at least one fatal value receives F grade. 5.1 Vacuum Based Devices The most commonly used vacuum based detector is a photomultiplier, widely used by many applications in high energy or astro-particle experiments. Major characteristics are high intrinsic gain with single photon count capability, high speed, but poor quantum efficiency. Variety of dynode structures for position sensitivity is available such as Metal Channel Plate, Micro Channel Plate (MCP) and Fine Mesh. By adopting these dynodes, multi pixel PMT with pixel size from 2mm to 1cm has become commercially available in 90's. 5.2 Solid State Devices Another branch of photon detectors is a solid-state device mainly made by Silicon PIN junction. It is extremely linear with high quantum efficiency, but low (or no) intrinsic gain and rather slow time response (per unit sensitive area.) It has been extensively used for energy measurement in calorimeters where light intensity is high enough. Pixelization is trivial on a silicon wafer and a CCD is the best example in this category. There have been several attempts to improve gain as shown in table; Among them, Avalanche Photon Diode (APD), Metal Resistive Semiconductor (MRS) and Visible Light Photon Counter (VLPC) are listed here. Unfortunately, there is still no suitable candidate for our purpose, either because of slow readout speed, low gain or small pixel size. 5.3 Hybrid Devices Hybrid devices combine vacuum and solid state in one system. Photoelectrons are emitted into vacuum from photo cathode, and after acceleration by 10kV or so, they bombard a solid state device. Depending the type of solid-state device, it is named as HPD (Hybrid Photo dynode), HAPD (Hybrid Avalanche Photon Diode), ISPA (Imaging Silicon Pixel Array) or EBCCD (Electron Bombarded CCD). - 31 - 16~64 <256 64 ~1M ~2.5 ~2.5 5 ~30 25 40 70 >1000 1~10 ~.01 .5~5 ~1 ~1 <256 ~1M <16 <16 <16 ~10 ~1 ~2 ~2 ~2 2~10 2~10 .1~2 .01~.1 3 <256 <256 ~100K ~1M 256 ~2 ~2 ~30 ~2 5 >20 >50 % Col >80 >90 % 54 ~50 10 ~30 ~20 ~20 ~20 ~20 <10 <10 <10 <10 <10 ~10 ~10 ~10 ~10 ~10 40 40 100 100 50 ~40 ~40 ~30 ~30 ~10 >5 >10 - ENF <1.1 1.0 - G >3000 >105 - <20 <10 % 80 70 80 90 10 10 - 1.2 1.5 1.2 1.5 ~106 ~106 ~106 103 ~ 6 ~50 ~20 ~50 ~10 ~80 ~80 ~80 ~60 ~60 100 100 100 10 100 1 1 2 - 1.0 1.0 >2 1.0 1.0 1 1 <100 104 104 <10 <10 ~10 ~10 ~10 ~20 ~20 ~20 ~20 ~50 90 90 90 90 >90 1000 1000 1000 1000 1000 1.0 1.0 1.0 1.0 1.0 1000 105 1000 1000 ~105 <10 ~10 <10 <10 <10 Table.8 Comparison of various photo-detectors (Bold: Good, Underline: Fatal) - 32 - Anode Nonuniformity 2~4 2~10 5.6 .01~1 ~6 ~6 mm Intrinsic Gain <20 <10 % Excess Noise Factor W g Mortification factor () Wight per Unit >2.5 >5 cm detector Quantum Efficiency at 300nm Photoelectron Collection Efficiency Dimension of one Unit Dead Space #Pixel per Unit >16 >64 Pixel Size Notation Specs (Minimum) Spec (Ideal) Unit Vacuum Device Metal Cannel PMT MCP PMT Flat Panel PMT Image Intensifier Solid State Device PIN Photo Diode CCD APD MRS VLPC Hybrid Device HPD HAPD ISPA EBCCD Katsushi's Dream Final Grade Cost per Pixel Readout Time per Unit Rise/Fall Time Transit Time Spread Signal to Noise Ratio (S = #Incident Photons) Remarks Notation Specs (Minimum) SNR S 6.0 TTS <1 <5 <1 <50 A- Specs (Ideal) Unit Vacuum Device Metal Channel PMT S 2.0 - <0.5 nsec <2 nsec <1 sec <20 $ A+ - S 6.0 0.3 1 <1 40 A_ Most practical solution as of today. MCP PMT S 8.6 0.1 0.5 <1 50 B Poor resolution than Metal Channel. Flat Panel PMT S 6.0 0.3 1 <1 ? A Best practical solution of tomorrow. Image Intensifier Solid State Device PIN Photo Diode S 8.3 - - >1000 5 F Pixel too small, bulky, slow readout. S 1.3 ~ 1000000 / S 2 5 <1 10 F No Gain. CCD S 1.3 ~ 1000 / S - - >1000 <1 F Pixel too small, no Gain, slow readout. APD S 2.5 ~ 100 / S 2 5 <1 50 C Gain too low. MRS S 16 2 5 <1 ? F Poor photoelectron collection, too noisy. VLPC Hybrid Device HPD S 1.6 2 5 <1 50 C Pixel a bit too small, Liquid He, costly. S 5.6 ~ 10 / S 2 5 <1 20 B Gain a bit too low. HAPD S 5.6 2 5 <1 50 A Excellent device, but only single pixel. ISPA S 5.6 2 5 <1 ? B+ Bulky, could be improved. Stay tuned. EBCCD S 5.6 - - >1000 ? F Katsushi's Dream S 2.0 2 5 <1 ?? A+ - 33 - Pixel too small, low readout Ideal device but does not exist yet! Advantages of such devices are their conceptual simplicity, uniform response with large dynamic range, and flexibility for pixelization. On the other hand, it still inherits poor quantum efficiency as a vacuum device. Every 3.6V of acceleration in vacuum yields another electron-hole pair, thus 10kV acceleration produces an intrinsic gain of ~ 3000. With additional gain of 10 ~ 100 by APD, HAPD can have high gain of ~ 105, enough for single photon counting without any amplifier. Recently, the LHC-CMS experiment has adopted multi-pixel HPD developed by DEP for a hadron calorimeter [Cushman]. The LHC-b experiment is also considering a large-area multipixel HPD for RICH (Ring Imaging Cherenkov). Such a device would be very attractive for OWL-AirWatch, if it could reduce the dead-area. 6. Candidate Photo-Detectors 6.1 Metal-channel PMT Based on the argument above, the best commercial device as of today is chosen to be the Hamamatsu Metal-channel Plate PMT, R7600 series. This is a metal packaged, square PMT with outer dimension of 25.7mm x 25.7mm. Various multi-pixel versions are available; either one, four, 16 or 64. For our purpose, the 16-pixels version, called R7600-M16 fits all our minimum specifications. The cross sectional view of the front face of this device is given in Figure. 8. Anode Pixel Photo Cathode 4.1mm 17.5mm 22mm 0.5mm 4mm 4.1mm Figure. 8 Front view of Hamamatsu R7600-M16. - 34 - 25.7mm Figure. 9 Mechanical structure and Catalog Specifications of Hamamatsu R7600-M16 - 35 - Figure. 10 Quantum Efficiency, Gain and Time Response of Hamamatsu R7600-M16 - 36 - Figure. 11 Linearity, Uniformity and Cross-talk of Hamamatsu R7600-M16. The cross talk in Figure 7 above is measured by shining the central pixel at a level of 100%. - 37 - To show typical characteristics of this PMT, specifications and various plots from the catalog are shown in Figure. 9 ~ 11. They are taken from the catalog of [H6568] which is the assembled version of R5900-M16. (R5900 is the previous model of R7600 with larger outer dimension, thus larger dead-space.) A major problem of this type of device is a large dead area. In the R7600 series, the effective 4mm 4mm 16 0.39 . In reality, 0.5mm of the dead space photo-cathode area is given by 25.7 mm 25.7 mm between pixels is not dead but gives signal into adjacent pixels. By taking this into account, the 2 17.5mm more practical effective area is given by 0.46 , still less than a half. 25.7mm To avoid the dead space, segmented Winston-cone type light collector shown in Figure 12 can be developed. Preliminary Monte Carlo Simulation shows that an order of 50-60% light collection efficiency can be achieved with a standard reflector of 90% reflectivity [Kimura]. The entrance of the light corrector would be covered by UV band-path filter to reject visible-IR part of dark sky noise. Surface of R7600-M16 4mm 2.57cm Entrance Surface of Light Guide 7mm 2.8cm 2cm UV filter Light Guide 2cm R7600-M16 PMT 2.57cm Figure. 12 R7600-M16 PMT with light collector to avoid dead area. - 38 - Another challenge is how to cover a curved focal plane by the flat surface of PMTs. As the spot size is of the same order as pixel size due to chromatic aberration, it is conceivable to cover the focal plane by segmented flat panels as shown in Figure 13 below. Here the panel size is 67.2cm, corresponding to 96 pixels (or 24 PMTs). Although more detailed optical and mechanical studies are required, this approach appears feasible. The Super-Panel can be sub-divided into four SubPanels of 48 x 48 pixels that correspond to one unit of Trigger/electronics design by the Italian group [Catalano]. Super-Panel (96x96 pixel) Sub-Panel (48x48 pixel) 67.2cm 3.36m 3.5m Figure. 13 A possible layout of flat panels to cover the curved focal plane. - 39 - 6.2 Flat Panel PMT The Flat Panel PMT is the next generation PMT under development at Hamamatsu which would replace the R7600 series [Yoshizawa]. It is expected to become commercially available in mid 2000. Figure 14 shows the picture of a prototype and the conceptual cross sectional view. Window (2.8 mm t) Bialkali Photocathode Metal Channel Dynode (10-stage) Anode Tip off tube Pixel Figure. 14 A picture of the Flat Panel PMT and its structure. - 40 - As shown here, the outer dimension is 50.5mm square with effective area of 49.7mm square, 2 49.7 mm yielding the effective area of 0.97 , remarkable improvement over R7600! If this is 50.5mm the case, the inefficient light collector is no longer inevitable. The first product will have 64 pixels with 5.6mm pixel diameter. The specifications provided by Hamamatsu are given in Table 9. The basic characteristics are expected to be similar to R7600 in terms of quantum efficiency, gain, time response etc.. Fortunately the pixel size well matches our requirement for the OWL-AirWatch experiment. Therefore once this becomes available, one Flat Panel PMT can naturally replaces four of R7600-M16. The only concern is a rather thick glass window. It is currently 2.8mm, and may need to reduce to ~1mm level to avoid unwanted optical cross talk inside. Otherwise, this device would make an ideal focal plane for our application. Parameter Spectral Response Photo-cathode Material Material Window Thickness Structure Dynode Number of Stages Supply Voltage Gain Number of Pixels Pixel Size and Pitch Effective Area Dimensional Outline Weight Description/Value 300 to 600 Bialkali Borosilicate glass 2.8 Metal channel Dynode 10(12) 1000 106 8x8 5.6 x 5.6 / 6.0 49.7 x 49.7 50.5 x 50.5 x 12.4 70 Table. 9 Specifications of the Flat Panel by Hamamatsu. - 41 - Unit nm mm V mm mm mm gram 6.3 Katsushi's Dream Detector Even though multi pixel PMTs such as R7600 and the Flat-panel PMT satisfy our specifications, it is still far from the ideal device; Quantum efficiency is poor (20 ~ 25%), and the gain is not uniform from pixel to pixel (by a factor of 2 ~ 3). To overcome such disadvantages, I have been proposing "Katsushi's Dream Detector" on many occasions [Arisaka.1, Arisaka.2]. The concept is shown in Figure 15. This is a multi-pixel, Hybrid APD with Solid State photo cathode having ~50% quantum efficiency, housed in a ceramic square case of the Flat-Panel PMT size. Assuming that finer segmentation will become important for the second-generation OWL-AirWatch experiments, 256 square pixels with 3mm size are assumed here. To achieve 50% of quantum efficiency at the wave length of 300 ~ 400nm, InGaN is under consideration for the photo cathode. Front-end readout electronics is directly attached behind the APD array with signal processing digital electronics, driving a single optical fiber to send out digital signals. This greatly simplifies the mechanical complexity of feed-though. Once it is realized, such a device could easily replace the Flat-Panel in the future. We plan to continue necessary R&D in a close collaboration with industries. Glass Window (1mmt) InGaN Photo Cathode APD Array (16 x 16 = 256 Pixel) Readout Electronics HV LV 47.6mm• Optical Fiber for Signal Readout 50.5mm• Figure. 15 Conceptual cross sectional view of Katsushi's Dream Detector. - 42 - Ceramic Case 6.4 Summary and R&D plan So far, I have listed three candidates from a realistic one to a dream one. For fair comparison, all the important parameters are summarized in Table 10 together with the specifications. In this table, poor parameters are underlined. Several remarks can be made based on this table. 1) Hamamatsu R7600-M16 is a practical solution with reasonable specs. However the dead space and gain non-uniformity are two major concerns. 2) Hamamatsu Flat Panel PMT significantly reduces the dead space. But gain non-uniformity could remain as poor as R7600-M16. The thick (compared to R7600-M16) glass window is another concern. 3) "Katsushi's Dream Detector" is an attempt to overcome the non-uniformity problem of the above two. With Solid State photo-cathode, quantum efficiency should be dramatically improved to 50% level as well. Hamamatsu R7600-M16 is the heaviest (1.56gram per pixel). Since the focal plane of our baseline OWL-AirWatch detector consists of 200,000 pixels, the total weight would become 310kg. This is still of order 5% of the total allowed weight of the spacecraft. Further weight reduction is expected for the Flat Panel. Thus the weight of photon detectors is not an issue. There are several peripheral R&D efforts to be pursued in addition to the further development of photon detectors themselves. 1) In case of R7600-M16, the light collector must be carefully designed to minimize the dead space, while signal loss and cross talk are minimized. 2) Mechanical structure of the support frame requires careful study. The concept of using a flat panel of ~70cm square was presented, but it is not engineered. Space-qualified engineering design requires more expert thought. 3) The power consumption by the HV power supply is not analyzed yet. The idea exists to operate PMTs under lower HV until a self-trigger activates the HV and readout system. Under this scenario, the last dynode signal would be read out by a high-again preamplifier to provide a self trigger signal. In summary, developing the ideal the photon detector for OWL-AirWatch is indeed a challenging project. However, thanks to recent technological advancement, there is a reasonable existing solution and we are confident that eventually we will get much better solution one way or another. - 43 - Parameter Description Notation Pixel Size Number of Pixels per Unit Physical Dimension of One unit Window Thickness Window Transparency at 350nm Weight per Pixel Dead Space Quantum Efficiency Cathode Non-uniformity Anode Non-uniformity Photo-electron Collection Efficiency Cross Talk between Pixels Excess Noise Factor Intrinsic Gain Dynamic Range Equivalent Noise Charge Transit Time Spread for Single PE Rise Time and Fall Time Pulse Width Readout Speed per Detector Unit Dark Current per Pixel Dark Pulse Rate per Pixel After Pulse Life Time Power Consumption of HV per Pixel Cost per Pixel detector #Pixels Dunit W - Col ENF G ENC TTS Idark - Specifications Minimum Ideal ~ 6mm 16 >64 > 2.5cm > 5cm <1mm > 80% > 90% < 1.5gram < 1gram < 20% < 10% > 20% > 50% < 20% < 10% < 50% < 20% > 80% > 90% < 5% < 2% < 1.1 1.0 > 3,000 > 105 ~1,000 ~10,000 < 1000e < 300e< 1nsec < 0.5nsec < 5nsec < 2nsec < 10nsec < 5nsec <1sec < 1nA < 10kHz < 1% 10 Years < 500W < 200W < $50 < $20 Hamamatsu R7600-M16 4.0mm 16 2.57cm 0.8mm 90% 1.56gram 54% 20% 20% 50% 80% 1% 1.1 ~106 10,000 1000e0.3nsec 1.0nsec 1.5nsec <1sec 0.2nA <100Hz < 1% >10 Years ~200W ~$40 Hamamatsu Flat Panel 5.6mm 64 5.05cm 2.8mm 90% 1.09gram 10% 20% 20% 50% 80% 1% 1.1 ~106 10,000 1000e0.3nsec 1.0nsec 1.5nsec <1sec 0.2nA <100Hz < 1% >10 Years ~200W ? Table.10 Comparison of the OWL-AirWatch photo-detector candidates. - 44 - Katsushi's Dream 3.0mm 256 5.05cm 0.8mm 90% 0.25gram 10% 50% 10% 10% 90% 1% 1.0 ~105 106 300e0.5nsec 2nsec 5nsec <1sec 0.1nA <100Hz < 1% >10 Years <100W ?? 7. Conclusion It was demonstrated that the OWL-AirWatch is a serious, realistic experiment to study ultra highenergy cosmic rays and neutrinos with at least ten times higher statistics than the Auger or TA project. It is not an imaginary experiment. To evaluate its feasibility, several useful scaling laws were derived first from the existing experiments such as HiRes at Utah. Based on these laws, the baseline detector concepts and all the important parameters were presented. Our current baseline detector satisfies the following three goals: 1) Effective Aperture (after the correction of duty factor) will be an order of 80,000km2str, at least ten times larger than the Auger or the Telescope Array. 2) Energy threshold will be well below 1020eV. 3) Angular resolution will be of order 1o. It requires ~200k pixels of advanced photo-detectors with single-photon counting capability. Thanks to recent developments in industries, there is at least one existing detector candidate, Metal Channel Plate PMT R7600-M16, and even more attractive ones are promising. Although there are still many technical challenges to be solved, there is no fundamental obstacle so far. Our future seems bright. Acknowledgement My special thanks go to Yoshi Takahashi who has been providing me all the necessary information to consider the detector optimization described in this document. Discussions with him in many occasions always keep me focus on important physics and other issues. I would like to thank Dave Cline and Gene Loh for bringing me into this exciting field of ultra high-energy cosmic rays in early 98. I would also like to thank David Lamb for optics design, Osvaldo Catalano for trigger and electronics design. Their contributions were essential for photon detector optimization. Lastly I am grateful to Yuji Yoshizawa for providing me the most updated technical information of various photon detectors under development at Hamamatsu. - 45 - References [Arisaka.1] Katsushi Arisaka, "Advances in Vacuum Photon Detectors for High Energy Experiments". Talk presented at SCIFI 97: Conference on scintillating fiber detectors. Notre Dame, Indiana, November 1997. Published in AIP Conference Proceedings 450. [Arisaka.2] Katsushi Arisaka, "New Trends in Vacuum Based Photon Detectors". Talk presented at Second conference on new developments in photon detection, BEAUNE 99, Beaune, France, June 21-15, 1999. To be published to N.I.M. [Catalano] Osvaldo Catalano, "AirWatch from Space" Progress Report, Sep 24, 1999 [Cushman] Priscilla Cushman, "Status of the CMS hadron calorimeter HPD readout system". Talk presented at Second conference on new developments in photon detection, BEAUNE 99, Beaune, France, June 21-15, 1999. To be published to N.I.M. [Delta III] The Boeing Company, "Delta III payload Planners Guide, MDC 99H0068" http://boeing.com/defensespace/space/delta/deltahome.htm [HiRes] Univ. of Utah et. al., "Proposal to Construct a High Resolution Eye (HiRes) Detector", Submitted to NSF, 1992 [H6568] Hamamatsu Photonics. Co., "Multi Anode Photomultiplier Tube Assembly H6568, H6568-10", Preliminary Data, March. 1999 [Kimura] Suenori Kimura, "Analysis of Light Guide for R5900-M16/64", Hamamatsu Internal Report, May 15, 1998 [Lamb] David J. Lamb, "Current Status of AirWatch-OWL Optics", Talk presented at OWL-AirWatch technical meeting at Palermo, Italy, Dec 13, 1999 - 46 - [Red Book] John. Krizmanic etc. editors, "Workshop on Observing Giant Cosmic Ray Air Showers from >1020 eV Participles from Space", AIP Conference Proceedings 433, College Park, Maryland 1997 [Takahashi] Yoshiyuki Takahashi, "Great Science Observatories in the Space Station Era and OWL efforts in Japan". Talk presented at "Workshop on Observing Giant Cosmic Ray Air Showers from >1020 eV Participles from Space", AIP Conference Proceedings 433, College Park, Maryland 1997 [Yoshizawa] Yuji Yoshizawa, "Flat Panel PMT", Talk presented at 7th International Conference on Instrumentation for Colliding Beam Physics, 15-19 November 1999 at Hamamatsu, Shizuoka, Japan - 47 -