Spectral Characterization of Functional Vectors for
advertisement

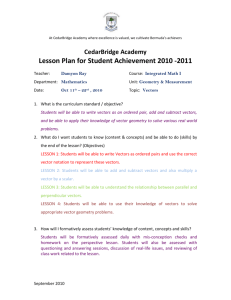
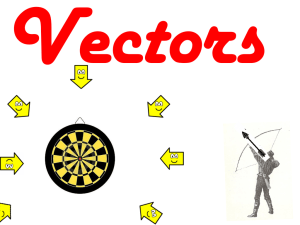
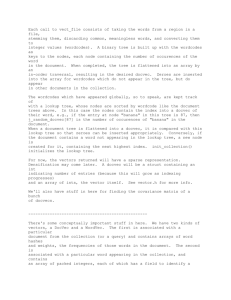
SPECTRAL CHARACTERIZATION OF FUNCTIONAL VECTORS FOR GATELEVEL FAULT COVERAGE TESTS Nitin Yogi1 and Vishwani D. Agrawal1 Abstract Vector sequences generated from functional description of digital circuits exercise a sufficient set of key or critical operations and are used for verification of pre-synthesis architecture and post-synthesis logic design. We analyze these vectors using Hadamard matrices and determine the prominent or essential Walsh spectral components and the low intensity noise-like components. This implementation-independent spectral information is then used to generate fault coverage vector sequences for gate-level non-scan implementations by making use of Hadamard matrix again and by randomly perturbing the Walsh spectra in which the essential components are left unperturbed. At the gate-level, a fault simulator is used to compact the vector sequences. We give results for three non-scan ISCAS’89 and one ITC’99 benchmarks for which functional descriptions were available. Our results show that the spectral vectors are comparable in fault coverage and test length to gate-level sequential ATPG. 1. Introduction Verification of a digital system checks the functional correctness, which is essential before proceeding with low-level implementation and manufacture. Verification vectors are created from the knowledge of the input-output behavior and exercise all or most functions with selected critical data patterns. These vectors are used for simulation of the architecture-level, register-transfer level (RTL), and gate-level designs. Such vectors are also found to be useful in detection of several kinds of manufacturing defects such as timing faults. However, they have not been used in manufacturing test because of a usually low gate-level stuck-at fault coverage and large test data volume. Therefore, the problem of finding a small subset of functional vectors with high fault coverage is of interest. We develop a new spectral method to generate vectors that resemble, though they are not the same as, functional vectors. Analysis shows that the temporal behavior of a functional vector sequence is largely described by a digital spectrum of Walsh functions. Besides, recognizable Walsh functions a functional sequence also contains random behavior. Using these two characteristics, we generate vector sequences for gate-level fault coverage. Only a gate-level fault simulator is used; no ATPG program is required. 2. Background Background work related to our research has been in two directions, namely, behavior or RTL test generation, and spectral test generation. 1 Auburn University, Dept. of ECE, 200 Broun Hall, Auburn University, AL 36849, USA; Email: yoginit@auburn.edu, vagrawal@eng.auburn.edu. Proc. 10th VLSI Design and Test Symp. (VDAT), Goa, August 9-12, 2006. Published as Progress in VLSI Design and Test 2006, New Delhi: Elite Publishing House Pvt. Ltd., 2006, pp. 407-417. 408 ● Progress in VLSI Design and Test 2.1 Register-Transfer Level Methods Several RTL test generation methods have been proposed. Ravi and Jha [Ravi and Jha (2001)], Ghosh and Fujita [ Ghosh and Fujita (1999)], Kim and Hayes [ Kim and Hayes (1998)] and Goloubeva et al. [ Goloubeva et al. (2002)] use pre-computed test sets for RTL constructs like adders, multiplexers etc. and derive test vectors for the whole RTL circuit. Precomputed test sets either make assumptions about the synthesis of the design or use a superset of the actually required test vectors. All of them use some kind of data structure or metrics to derive the RTL test sets, which have implications of large memory and computation overheads. Ravi and Jha [ Ravi and Jha (2001)], and Kim and Hayes [ Kim and Hayes (1998)] use controllability and observability metrics, while Ghosh and Fujita [Ghosh and Fujita (1999)] and Goloubeva et al. [Goloubeva et al. (2002)] use data structures like decision diagrams. Yi and Hayes [ Yi and Hayes (2005)], and Pomeranz and Reddy [ Pomeranz and Reddy (1999)] have proposed a fault model which considers fault activation and propagation from the primary inputs to primary outputs. Test vectors can then be generated to cover these faults. However these fault models have been restricted to only combinational circuits. Thaker et al. [Thaker et al. (2003)] have shown that a set of stuck-at faults of variables in high-level synthetic operators and at the boundaries of RTL modules can be used as a statistical sample for the gate-level coverage analysis. Recent work by Kang et al. [ Kang et al. (2006)] uses a set of stuck-at faults on primary inputs for high-level coverage analysis. Their sensitization fault coverage considers the detection of each primary input fault separately at every primary output. The coverage of sensitization faults is shown to correlate well with the stuck-at fault coverage in any gate-level implementation. 2.2 Spectral Methods In 1983, Susskind [Susskind (1983)] showed that Walsh spectrum can be used for testing a digital circuit. General properties and applications of digital spectra can be found in the published literature [Beauchamp (1984), Falkowski (2002), Hurst (1985) and Thornton (2001)]. Hsiao and Seth [Hsiao and Seth (1984)] further expanded that work to compact testing. More recently, Giani et al. [Giani et al. (2001)] have reported spectral techniques for sequential ATPG and built-in self-test. Hsiao’s group at Virginia Tech has published further work on spectrum-based self test and core test [Chen and Hsiao (2002), Chen and Hsiao (2006), Kasturirangan and Hsiao (2002)]. Khan and Bushnell [Khan and Bushnell (2006)] have designed hardware signature analyzers using spectral components. Zhang et al. [Zhang et al. (2004)] further refined the method of extracting the spectra from a digital signal using a selfish gene algorithm. In recent work, Yogi and Agrawal [Yogi and Agrawal (2006)] consider RTL faults on the inputs and outputs of the circuit and inputs and outputs of flipflops. Test vectors for these RTL faults are analyzed for prominent spectral components and new vectors are generated using them. Recent work suggests that wavelet transforms can also be used for similar application [Devanathan and Bushnell (2006)]. With the exception of the RTL ATPG of Yogi and Agrawal [Yogi and Agrawal, 2006], all other published work on spectral methods requires gatelevel vectors generated for testing stuck-at faults, from which spectra are Spectral Characterization of Functional Vectors ● 409 extracted. In contrast, in this paper we use behavioral vectors to extract the spectra. The outline of the paper is as follows. Section 3 gives a brief overview of how bit streams can be analyzed in the spectral domain. In Section 4 we present spectral analysis and discuss results in Section 5. Finally, we conclude in Section 6. 3. Walsh Spectrum Our method of test generation is based on the premise that the spectrum of vectors that are meaningful to the function of the circuit reflects important characteristics of the circuit. However, any functional vectors will not only have the relevant spectral components but will also have some amount of noise, which corresponds to the functional don’t care bits. So, we analyze the spectrum and the noise level, and then generate new vectors using the spectrum, to which noise samples are added. Frequency decomposition means that any bit stream or signal can be projected on or represented using a set of orthogonal functions. The projections of the signal on each of the functions, give the contribution of the corresponding functions to the original signal. We shall use Walsh functions [Weisstein], because, as mentioned in the previous section, they have been used for testing with effective results. Walsh functions form a set of orthogonal functions and consist of trains of square pulses having only +1s and -1s as the allowed states, and can only change at fixed intervals of a unit time step. For an order n, there are 2n Walsh functions and are given by the rows of a 2n dimensional Hadamard matrix [Weisstein] H (n) when arranged in the so-called “sequency” order [Thompson et. al. (1986), Wolfram (2002)]. The Hadamard matrix is a symmetric matrix with each row being a unique Walsh orthogonal function, also called the basis vector. Since it consists of only +1s and −1s, it is a good choice for the signals in VLSI testing (+1 = logic 1, −1 = logic 0). Also, multiplications can essentially be computed using additions and subtractions only. Hence, we shall use the Hadamard matrices to analyze the bit-streams for each input contained in test vectors. Hadamard matrices are square matrices containing only +1 and −1 elements and can be generated using the following recurrence relation: H (n 1) H (n 1) H ( n) H (n 1) H (n 1) (1) where H (0) = 1 and 2n is the dimension of the nth order Hadamard matrix, H (n). For example, for n = 1 and n = 2, we have: 1 1 H (1) 1 1 and 1 1 1 1 1 1 1 1 H (2) 1 1 1 1 1 1 1 1 (2) An important property of the Hadamard matrix is that its transpose is equal to its inverse, thus giving H (n) × H (n)T = nIn where In is the n × n identity matrix. This simplifies reconstruction of the test vectors from the spectral 410 ● Progress in VLSI Design and Test domain. Any bit stream can be represented as a linear combination of the basis vectors of the Hadamard matrix. For example, consider H (2) having the four basis vectors [1 1 1 1], [1 −1 1 −1], [1 1 −1 −1] and [1 −1 −1 1]. The vector [1 −1 −1 −1] can be written as −1 × [1 1 1 1] + 1 × [1 −1 1 −1] + 1 × [1 1 −1 −1] + 1 × [1 −1 −1 1] where the multiplicand used for each basis vector is the projection of the bit stream on that basis vector. We shall refer to them as coefficients. By analyzing these coefficients we will be able to determine the major contributing basis vectors to the original signal, which we shall regard as important o r es sen tia l basis vectors. New test vectors are then generated retaining those basis vectors. 4. Functional Test Generation Our approach to test generation consists of two principal steps: 1. Spectral characterization of the circuit Functional verification vector generation Spectral analysis 2. Gate-level test generation Spectral vector generation Vector compaction and coverage analysis 4.1 Functional Verification Vector Generation Functional test vectors are targeted at the functional description of the circuit and characterize its behavior. They exercise the important functions of the design which differentiates them from other designs and hence in a sense are unique to the design. So we use them to find the characteristics of the circuit which will help us in test generation for gate-level fault coverage. Functional vectors, if available or created by the designer to verify the design, can be conveniently used in our method. In our case functional vectors are generated so that they exercise the various functions of the circuit and also cover its corner conditions. For example for a multiplier circuit, it becomes important not only to test the multiplication function but also to test the corner conditions of 0 multiplied with 0, 0 multiplied with a finite number, largest number multiplied with itself, etc. Depending on the circuit under consideration, the conditions required to be verified will vary. In this work, we have used three ISCAS-89 benchmark circuits that were reverse engineered by Hayes and his associates at the University of Michigan [Hansen et al. (1999)]. These are s298 (traffic light controller), s344 and s349 (both 4 × 4 add-shift multipliers). We have also used one ITC’99 benchmark circuit, b02 which is a finite-state machine that recognizes BCD numbers. 4.2 Spectral Analysis After we obtain the functional vectors, they are analyzed using Hadamard matrix to find the major components. To analyze the vectors, the bit streams entering each input are considered and analyzed separately. The 0s and 1s in the bit stream are represented as −1s and +1s. To find the coefficients of a bit stream corresponding to an input, the bit stream is multiplied with the Hadamard matrix. The multiplication operation is basically a correlation Spectral Characterization of Functional Vectors ● 411 operation of the bit stream with each of the basis vectors. A high value of the coefficient corresponds to a high correlation of the bit stream to the corresponding basis vector and vice-versa. Hence basis vectors exhibiting high coefficient values are considered as important vectors or essential components and others are considered as noise. Figure 1. Spectral analysis of an 8-bit stream. The essential Walsh component in this bit-stream has magnitude 6 and is represented by the second row of Hadamard matrix, H(3). Figure 1 shows an example. An 8 bit stream (0s and 1s in the original sequence being represented as −1s and +1s) is analyzed by multiplying with the third order 8 × 8 Hadamard matrix. The corresponding result gives the coefficients. As shown, we obtained a single coefficient with high correlation coefficient, which we shall treat as essential component and others will be treated as noise. The verification vectors we used are long vector sequences and do not always have lengths that are powers of two. One option is to use a limited dimension Hadamard matrix and analyze pieces of the bit stream individually. However, this method has the disadvantage that, it might not be able to capture the long periodicity inherent in the bit stream. Hence, we analyze the whole bit stream using a u s i n g a s i n g l e Hadamard matrix of l a r g e . To exactly fit in into our matrix analysis, we either need to truncate the bit stream or use a higher order Hadamard matrix. We use a dimension that is closest to the length of the bit stream. For example for a bit stream of length 135 we choose a Hadamard matrix of dimension 128 and analyze only the first 128 bits of the bit stream. Analysis using a dimension of 256 is found to give rise to a large number of noisy components due to the uncertainty in the unspecified bits from 135 to 256. The noise tends to hide the essential components. In cases where we use a dimension greater than the bit stream, the bit stream is extended with 0s up to the dimension of the matrix to indicate non-inclusion of these bits in the correlation operation. Figure 2 shows the spectral coefficients for the circuit s298 whose three input bit streams were of length 75 but were analyzed using the 64 × 64 Hadamard matrix after truncating the original bit streams. The high rising bars show high correlation with the corresponding basis vector and are considered essential. To determine the threshold level, which would separate the essential components from the noise components, a technique in which the coefficient value is compared with the mean of the total spectrum is used. Assuming white noise we shall have all equal valued coefficients and their magnitudes will be equal to the mean of any other arbitrary spectrum. Hence after all the coefficients are determined, they are squared and the magnitude of the maximum coefficient is compared with the mean of all the coefficients by taking a ratio of the two. In this comparison we are actually comparing the percentage of power in the coefficient to the mean 412 ● Progress in VLSI Design and Test noise power. If the ratio of the magnitude of the coefficient being considered, to the mean of the coefficients is greater than some constant K, then the coefficient and hence the corresponding basis vector is considered to be an essential component. The corresponding coefficient is separated from the spectrum and the same process is repeated for the next maximum coefficients until the criteria are no longer satisfied. The coefficients thus remaining after this process are considered non-essential or noise. The constant K affects which coefficients being considered as essential ones. A very high value of K makes the selection process very acute, selecting only few components as essential while a low value of K is more liberal and selects more essential coefficients. Further discussion follows in the next section. Figure 2. Walsh spectral coefficients for s298 circuit. Figure 3. Bit-steam generation by perturbing the spectra. Note that the essential component having a magnitude 6 is not perturbed. 4.3 Spectral Vector Generation After spectral analysis of the functional vectors, the spectral coefficients are obtained. To generate gate-level test vectors, the essential spectral coefficients d eter mined by the threshold are retained and others are Spectral Characterization of Functional Vectors ● 413 considered noise. The noise can be filtered out or changed as per the selected methodology. Filtering out the noise components [Giani et. al. (2001)] has the disadvantage of losing the phase information inherent in those components, which is a part of the characterization of the circuit. Hence in our approach the noise components are perturbed in a confidence range in terms of magnitude and/or in phase to generate new coefficients. The confidence levels which make up the range and correspond to the amount of randomness to be added, have to be selected suitably and differ depending on the circuit as well as the type of test vectors being used. We are currently working on finding the correlation between these confidence levels and the nature of the spectral coefficients obtained from the test vectors, by studying their statistical properties. Currently, to find these levels, we investigate different ranges by generating new coefficients in that range and analyzing the fault coverages of the corresponding test vectors. The threshold is kept at the minimum during this process, to closely track the changes. A trend is generally visible and the optimum range for the confidence levels is then selected. The test vectors can easily be generated from the coefficients by multiplying the coefficients with the Hadamard matrix again. Figure 3 shows an example of reconstruction of the test vectors. As discussed before, the value of the constant K, to select the essential components, has a crucial impact on the nature of the generated test vectors. A low value of K tends to preserve most of the nature of the original functional vectors and has been found to give good initial fault coverage. A high value of K tends to select very few components as essential, regarding most as noise. This can sometimes generate vectors that may detect hard to detect faults. Hence we generate test vector sets with different values of K. Also since we are adding noise randomly, this variation gives different characteristics to each vector set. We generate multiple sets of vectors for each value of K. 4.4 Vector Compaction and Coverage Analysis Compaction is done by an integer linear program (ILP) [Drineas and Makris (2003)]. Each vector sequence is fault simulated, with the circuit starting in an unknown state and with the complete fault list restored, to eliminate the effect of the ordering of sequences. The fault simulator provides a complete list of vector sequences that detect each fault. The vector sequence Vi is assigned an integer variable, xi = [0; 1] (xi = 1: select the ith sequence, else discard it). Suppose kth fault is detected by sequences V3, V4, and V11, then the following ILP constraint picks at least one sequence: x3 + x4 + x11 ≥ 1 (3) The number of such constraints equals the number of faults. ILP determines the values of variables xi's that satisfy all the constraints with the following objective function: iM Minimize x i 1 i (4) where M is the total number of vector sequences generated. For the results given in the next section, we used the ILP software contained in the AMPL mathematical programming package [Fourer et. al. (1993)]. In the ILP 414 ● Progress in VLSI Design and Test solution, the smallest possible number of x's is assigned the value 1 and all others are assigned 0. The sequences with corresponding x’s set to 1 form the compacted test set. 5. Results The spectral technique of enhancing functional verification vectors for gate level fault coverage was applied to three ISCAS’89 (s289, s344 and s349) and one ITC’99 (b02) benchmark circuits. The characteristics of the different circuits are shown in Table 1. The functional test vectors for the circuits were generated by exercising the functions in the circuit. For s298, which is a traffic light controller, functional vectors exercise its three different modes of operations of signal switching. For s344 and s349, which are slightly different implementations of a sequential 4 × 4 bit addshift multiplier, functional vectors verify the corner cases of the multiplication operation. The functional test vectors were then a n a l yz e d f o r spectra, new test vectors were generated using the technique discussed above and then compacted. Results were obtained on Sun Ultra 5 machines with 256MB RAM. Table 2 shows the comparison of the proposed method with gate-level non-scan sequential ATPG method. The first two columns give the circuit and the number of gate level stuck-at faults in the circuit. Verification vectors, Functional ATPG and gate-level ATPG are then compared with respect to the gate-level fault coverage, the number of vectors generated and the test generation time. For Functional ATPG, the test generation time includes only the fault simulatio n and compaction times; time to generate the different spectral test sets being negligible. From Table 2, we observe that all four circuits do satisfactorily in terms of gate-level fault coverage, number of vectors and CPU time. Figure 4 compares the graph of fault coverage percentage against the number of vectors applied for circuit s298 for gate-level ATPG (FlexTest [Mentor Graphics (2004)]), spectral ATPG, functional vectors and random vectors. FlexTest was used in the non-scan mode as gate-level ATPG. Circuit s298 s344 s349 b02 PIs 3 9 9 2 Table 1. Circuit description. POs FFs Function 6 14 Traffic light controller 11 15 4 x 4 add-shift multiplier 11 15 4 x 4 add-shift multiplier 1 4 Finite-state machine Table 2. Functional vectors, spectral ATPG and gate-level ATPG. Circuit name s298 s344 s349 b02 Functional Spectral ATPG Gate-level ATPG No. of vectors gate No. of Fault No. of Fault CPU No. of Fault CPU faults vecs cov (%) vecs cov (%) s vecs cov (%) s 698 1020 1030 148 75 57 57 13 81.23 87.45 87.09 85.47 192 256 256 48 84.74 91.08 90.68 93.92 21 51 51 10 152 150 150 38 85.89 90.78 90.39 94.26 45 23 26 1 6. Conclusion We have presented a new method of functional test generation using spectral techniques. Functional verification vectors are analyzed using Spectral Characterization of Functional Vectors ● 415 Hadamard matrix to extract important features. Generation of new vector sets fr o m tho se features and compacting them is an efficient method for test generation. Results show that the coverage of functional vectors can be effectively improved to match that of a gate-level ATPG. Figure 4. Test coverage in s298 circuit. Although the coverages are not as high as are possible with scan vectors, non-scan vectors with highest attainable coverage have value in the highvolume production testing of processors and other custom devices. When applied at speed, these vectors are found to detect timing and other defects not normally detected by the scan vectors. Our on-going work on processor testing will be reported in a forthcoming paper. References [1] K. G. Beauchamp (1984). Applications of Walsh and Related Functions with an Introduction to Sequency Theory. Orlando, FL: Academic Press, 1984. [2] X. Chen and M. S. Hsiao (2002). Characteristic Faults and Spectral Information for Logic BIST, Proc. Int. Conf. Computer-Aided Design, November 2002, pp. 294-298. [3] X. Chen and M. S. Hsiao (2006). Testing Embedded Sequential Cores in Parallel Using Spectrum-Based BIST. IEEE Trans. Computers, vol. 55, no. 2, pp. 150-162, Feb. 2006. [4] S. K. Devanathan and M. L. Bushnell (2006). Sequential Spectral ATPG Using the Wavelet Transform and Compaction. Proc. 19th International Conference on VLSI Design, 2006, pp. 407-412. [5] P. Drineas and Y. Makris (2003). Independent Test Sequence Compaction through Integer Programming. Proc. ICCAD, 2003, pp. 380386. [6] B. J. Falkowski (2002). Spectral Testing of Digital Circuits. VLSI Design, vol. 14, no. 1, pp. 83-105, 2002. [7] R. Fourer, D. M. Gay, and B. W. Kernighan (1993). AMPL: A Modeling Language for Mathematical Programming. South San Francisco, California: The Scientific Press, 1993. 416 ● Progress in VLSI Design and Test [8] I. Ghosh and M. Fujita (1999). Automatic Test Pattern Generation for Functional RTL Circuits Using Assignment Decision Diagrams. Proc. 35th Design Automation Conf., 1999, pp. 43-48. [9] A. Giani, S. Sheng, M. S. Hsiao, and V. D. Agrawal (2001). Efficient Spectral Techniques for Sequential ATPG. Proc. Design, Automation and Test in Europe (DATE) Conf., 2001, pp. 204-208. [10] A. Giani, S. Sheng, M. S. Hsiao, and V. D. Agrawal (2001). Novel Spectral Methods for Built-In Self-Test in a System-on-a-Chip Environment. Proc. 19th IEEE VLSI Test Symp., 2001, pp. 163-168. [11] O. Goloubeva, G. Jervan, Z. Peng, M. Sonza Reorda, and M. Violante (2002). High-level and Hierarchical Test Sequence Generation. Proc. of HLDVT, 2002, pp. 169-174. [12] M. Hansen, H. Yalcin, and J. P. Hayes (1999). Unveiling the ISCAS-85 Benchmarks: A Case Study in Reverse Engineering. IEEE Design & Test of Computers, vol. 16, no. 3, pp. 72-80, July-Sep. 1999. Also see http://www.eecs.umich.edu/~jhayes/iscas. [13] T.-C. Hsiao and S. C. Seth (1984). An Analysis of the Use of Rademacher-Walsh Spectrum in Compact Testing. IEEE Trans. Computers, vol. 33, pp. 934-938, October 1984. [14] S. L. Hurst, D. M. Miller, and J. C. Muzio (1985). Spectral Techniques in Digital Logic. Orlando, FL: Academic Press, 1985. [15] J. Kang, S. C. Seth, and V. Gangaram (2006). Functional Fault Model for Coverage Analysis and Test Generation. 2006 (in preparation). [16] G. Kasturirangan and M. S. Hsiao (2002). Spectrum-Based BIST in Complex SOCs. Proc. 20th IEEE VLSI Test Symp, April 2002, pp. 111-116. [17] O. I. Khan and M. L. Bushnell (2006). Aliasing Analysis of Spectral Statistical Response Compaction Techniques. Proc. 19th International Conference on VLSI Design, 2006, pp. 801-806. [18] H. Kim and J. P. Hayes (1998). High-Coverage ATPG for Datapath Circuits with Unimplemented Blocks. Proc. International Test Conf., 1998, pp. 577-586. [19] Mentor Graphics, FastScan and FlexTest Reference Manual, 2004. [20] I. Pomeranz and S. M. Reddy (1 9 9 9 ). Pattern Sensitivity: A Property to Guide Test Generation for Combinational Circuits. Proc. 8th IEEE Asian Test Symposium, 1999, pp. 75-80. [21] S. Ravi and N. K. Jha (2001). Fast Test Generation for Circuits with RTL and Gate-Level Views. Proc. International Test Conf., 2001, pp. 1068-1077. [22] A. K. Susskind (1983). Testing by verifying Walsh coefficients. IEEE Trans. Computers, vol. 32, no. 2, pp. 198-201, February 1983. [23] P. A. Thaker, V. D. Agrawal, and M. E. Zaghloul (2003). A Test Evaluation Technique for VLSI Circuits Using Register-Transfer Level Fault Modeling. IEEE Trans. CAD, vol. 22, no. 8, pp. 1104-1113, August 2003. [24] A. R. Thompson, J. M. Moran, and G. W. Swenson Jr. (1986). Interferometry and Synthesis in Radio Astronomy. New York: Wiley, 1986. [25] M. A. Thornton, R. Drechsler, and D. M. Miller (2001). Spectral Techniques in VLSI CAD. Boston: Springer, 2001. [26] E. W. Weisstein. From MathWorld A Wolfram Web Resource. http://mathworld.wolfram.com. [27] S. Wolfram (2002). A New Kind of Science. Champaign, IL: Wolfram Media, 2002. [28] J. Yi and J. P. Hayes (2005). A Fault Model for Function and Delay Faults. Journal of Electronic Testing: Theory and Applications, vol. 21, no. 6, pp. 631-649, 2005. Spectral Characterization of Functional Vectors ● 417 [29] N. Yogi and V. D. Agrawal (2006). High-Level Test Generation for Gate-Level Fault Coverage. Proc. 15th IEEE North Atlantic Test Workshop, May 2006, pp. 65-74. [30] J. Zhang, M. L. Bushnell, and V. D. Agrawal (2004). On Random Pattern Generation with the Selfish Gene Algorithm for Testing Digital Sequential Circuits. Proc. International Test Conference, 2004, pp. 617-626.