Dynamic system to generate the coordinates
advertisement

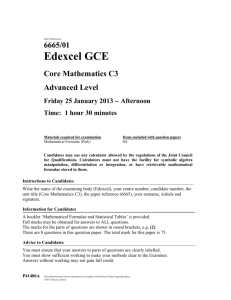
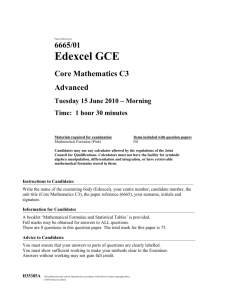
BULLETIN OF THE TRANSILVANIA UNIVERSITY OF BRAŞOV DYNAMIC SYSTEM TO GENERATE THE COORDINATES OF AN INTRINSIC DEFINED CURVE S. S. RADNEF Abstract. The paper deals with the differential geometry problem of finding the Cartesian coordinates of a curve defined by its own normal and torsion curvatures. Analysing the Serret-Frenet frame kinematics, there are derived the differential equations of its orientation angles. Then, by common geometry tools, there are derived the differential equations of the spherical coordinates, which are used to determine the cartesian ones. The result thus obtained is used for some special cases of intrinsic defined curves. The differential system that generates the coordinates of an intrinsic defined curve is used when we intend to describe in an intrinsic manner the general motion of a rigid body (namely an aircraft or space vehicle). 1. Introduction A curve is defined in intrinsic manner when its curvature and torsion are given by two functions of one parameter. For a plane curve thus defined, there is the Euler explicit integral solution that gives the cartesian coordinates of the curve in terms of its curvature. For the three-space the problem of finding such explicit solution (of integral or differential type) is a very difficult task. Perhaps of no significant meaning for differential geometry, this problem becomes an intrinsic one for the equations of motion of a free rigid body (an aircraft for example) which must not be dependent on the coordinate system of the reference frame. Because the equations of motion are of differential type, we will derive an explicit differential system which provides, as its Cauchy solution, the cartesian coordinates of a curve defined by its own intrinsic equations, that is kn Kn() R , kt Kt ( ) R . The main goal of this paper is attained by kinematics considerations, regarding the movement of a geometrical point along its own trajectory and by this way emphasising the kinematics of the Serret-Frenet axes system, denoted (TdF). We will use the spherical coordinates and the intrinsic definition of the curve referred to this coordinate system, that is a curve defined relative to a spherical surface (as an example we may consider the curve that represent the flight path of an aircraft relative to the Earth surface). The figure 1 represents these coordinate axes systems. We denote as O T and ff f fT the angles defined in the following figures and as O p O I q O J rO K f p f t q f n rf b the angular velocities of local spherical axes system and, Dept. of Flight Dynamics, National Institute of AeroSpace Research, Bucharest 316 Dynamic system to generate the coordinates of an intrinsic defined curve respectively, that of the Serret-Frenet axes system. The velocity of the geometrical point along the trajectory is: dR K vC R (1) O R dt ( P ) Fig. 1 The angular coordinates of the Frenet frame are as follows: Fig. 2 2. Equations of kinematics (TdF) kinematics The (TdF) rotation relative to the spherical axes system, denoted (TdO), is expressed as a result of succesive rotation represented by f angles: Bulletin of the Transilvania University of Brasov Vol 13(48) - 2006 317 f + f + f f = pf t + q f n + rf b = having: f - f K = - f (sin f t + cos f cos f n - sin f cos f b) f f (cos f I - sin f J ) = f (sin f n cos f b ) f f (cos f sin f I cos f cos f J sin f K ) f t By comparing similar terms, in (Cxfyfzf) axes system, we derive the following differential system: f cosf = -qf cosf rf sin f = q sin + r cos f f f f f f cosf = p f cosf + q f sin f cosf + rf sin f sin f expressed as : f f f (2) using the matrix: 0 cos 1 f cos f f 0 sin f 1 tan f cos f cos 1 f sin f cos f tan f sin f Defining the trajectory relative to a spherical surface of the spherical coordinates, with the main curvatures denoted kn , kt, we may write the angular velocity of (TdF): fN v C k t t v C k n b Regarding the linear velocity, we take into account that it may be expressed too as: v C v C t (v C sin f cosf ) I (v C cosf cosf )J (v C sin f )K (3) (TdO) kinematics The angular velocity of (TdO), o, is expressed as a result of successive rotation represented by O angles: O with the kinematic relations: (cos J sin K) , I So, we may write the differential equation of the spherical angles: O O O using the matrix: 0 cos sin O 0 0 1 3. Coordinates of intrinsic defined trajectory (4) Dynamic system to generate the coordinates of an intrinsic defined curve 318 Considering the equations (1), (2), (3), and (4) we derive the differential system R vC sin f O O (5) O f f f and: vC cos f cos f R vC qO sin f cos f R v rO tan C sin f cos f R p f vC k t pO qf 0 rf v C k n Using the spherical coordinates obtained by solving the previous system, one may derive the cartesian coordinates:: X p R cos cos Yp R cos sin Z P R sin Simplifying the (5) system by the factor vC we derive the differential system which produces by common integration procedures (numerical or analytical if possible) the coordinates of an intrinsic defined curve. dR sin f ds d O ˆO O ds d f ˆf f ds considering: (6) 1 1 O cos f cos f vC R 1 t ˆf f k t 0 k n vC ˆO sin f cos f tan sin f cos f t 4. Two sample intrinsic defined curves To validate the differential system (6) we choose curves defined in cartesian coordinates by three functions of one parameter and then derive their intrinsic equations. Using these intrinsic equations we must obtain using the system (6) and the appropriate starting point and direction the given cartesian coordinates. For example there were chosen a spiral curve and an oscillating ellipse. The spiral curve: Bulletin of the Transilvania University of Brasov Vol 13(48) - 2006 319 x a cos y b sin z h 2 has the curvature: kn q ( ) 2 2 2 a sin b 2 cos 2 h 2 3/ 2 and the torsion: h 2 kt q( ) ab 2 h 2 2 2 2 a cos b sin . Giving some values to 2spiral curve with the function q() a 2 b2 the parameters a, b, , h we have obtained, using the system (6), the same cartesian coordinates, and thus the same curve , as in the following figure: X g Y g Z g Fig. 1 Spiral curve The oscillating ellipse, defined by the cartezian coordinates: x a cos y b sin z c sin( 4) has the curvature: kn a 2 sin 2 b2 cos 2 16c 2 cos 2 (4) and the torsion: kt q( ) 60abc cos( 4) q( ) 3/ 2 Dynamic system to generate the coordinates of an intrinsic defined curve 320 2 traiectoria prescrisa 2 2 with the function q( ) 16b c 4 cos sin( 4 ) sin cos( 4) 16c 2 a 2 cos cos( 4 ) 4 sin sin( 4 ) a 2 b 2 2 Giving values to the parameters a, b, c we have obtained, using the system (6), the same cartezian coordinates, and thus the same curve, as in the following figure: Fig.2 Oscillating ellipse 5. Conclusions The differential (6) tY which ( x system y z) ( tX tZ) gives the spherical coordinates of the curve defined in intrinsic manner fulfilled the requirements to be integrated in the equations of motion of a rigid body (an aircraft as a sample one), as it was used in the reference 2 for finding the control laws to pursuit a given trajectory in a manner that in not dependent on coordinate system. Besides the two sample curves, the (6) system was used to provide the cartesian coordinates for many other curves, defined by coordinate values given along a given set of a free parameter values. The results where in a very good agreement with the defining cartesian coordinates. In such cases the curvatures must be determined using numerical tools with a great accuracy, which is a necessary requirement to obtain good results. 6. References 1. 2. Iacob Caius, Mecanica teoretica, Didactic and Pedagogic Publishing House, Bucharest, 1980 Sorin St. Radnef, Flight dynamics and control studies for pursuit problems, Ph d thesis, Polytechnic University of Bucharest, 2002