U1(z)= (U0(z),u1(z))=p10z000+p11z001
advertisement
= (U0(z),u1(z))=p10z000+p11z001")
Reliability of linear multi-state multiple sliding window systems
Gregory Levitin
The Israel Electric Corporation Ltd., Haifa, Israel
E-mail: levitin@iec.co.il
Abstract
This paper proposes a new model that generalizes the linear consecutive k-out-of-r-fromn:F system to multi-state case with multiple failure criteria. In this model (named linear multistate multiple sliding window system) the system consists of n linearly ordered multi-state
elements (MEs). Each ME can have different states: from complete failure up to perfect
functioning. A performance rate is associated with each state. Several functions are defined
for a set of integer numbers in such a way that for each r corresponding function fr
produces negative values if the combination of performance rates of r consecutive MEs
corresponds to the unacceptable state of the system. The system fails if at least one of
functions fr for any r consecutive MEs for r produces a negative value.
An algorithm for system reliability evaluation is suggested which is based on an extended
universal moment generating function. Examples of system reliability evaluation are
presented.
Keywords - multiple sliding window system, consecutive k-out-of-r-from-n:F system, multistate element, universal moment generating function.
1. Introduction
The linear consecutive k-out-of-r-from-n:F system has n ordered elements and fails if at
least k out of r consecutive elements fail. This system was formally introduced by Griffith [1],
but had been mentioned previously by Tong [2], Saperstein [3,4], Naus [5] and Nelson [6] in
1
connection with tests for non-random clustering, quality control and inspection procedures,
service systems, and radar detection problems.
Consider for example a quality control system that selects randomly for a quality check r
items produced consecutively by a manufacturing process. If within the selected sample at
least k items are defective, the system concludes that the process needs to be adjusted. If the
process produces n items in a certain period of time, we are interested in the probability that
such a random quality check is able to detect a problem in the process.
Different algorithms for evaluating the reliability of linear consecutive k-out-of-r-fromn:F systems were suggested in [7-9]. These algorithms either consider the case of identical
elements (elements with equal reliability) and limited set of parameters [1,5,8] or provide
bounds for system reliability [7-9] that are good enough only for element reliabilities very
close to 1. An enumerative algorithm for exact evaluation of system reliability based on
recursive computation of conditional probabilities was suggested by Malinowski and Preuss
[10]. Because of the difficulty of estimating the exact value of system reliability, Psillakis
[11] proposed a simulation approach and provided the error analysis.
A variety of models can be considered as special cases of the linear consecutive k-out-ofr-from-n:F system. When r=n, one has the well studied simple k-out-n:F system. When k=r,
one has the consecutive k-out-of-n:F system, which was introduced by Chiang and Niu [12],
and Bollinger [13,14]. The simple k-out-n:F system was generalized to the multi-state case by
Wu & Chen in [15], where system elements have two states but can have different integer
values of nominal performance rate. In [16] the general model is developed in which elements
can have an arbitrary number of real-valued performance levels. The multi-state
generalization of the consecutive k-out-of-n:F system was first suggested by Hwang & Yao
[17] as a generalization of linear consecutive-k-out-of-n:F system and linear consecutivelyconnected system with 2-state elements, studied by Shanthikumar [18,19]. Algorithms for
2
linear multistate consecutive k-out-of-n:F system reliability evaluation were developed by
Hwang & Yao [17], Kossow & Preuss [20], Zuo & Liang [21].
This paper presents an exact algorithm for evaluating the reliability of a generalized
consecutive k-out-of-r-from-n:F system. The system model is extended in two ways. First, it
is assumed that each element can have several discrete states characterized by different realvalued performance rates. The system fails if some condition imposed on a function of
performance rates of r consecutive elements is not met. Second, it is assumed that the failure
criteria are defined for different numbers of consecutive elements. The system fails if at least
one of the conditions for the groups of consecutive elements is not met.
In the general model, named the linear multi-state multiple sliding window system
(MSWS), the system consists of n linearly ordered multi-state elements (MEs). Each ME can
have several different states: from complete failure up to perfect functioning. A performance
rate is associated with each state. A set of integer numbers is defined such that any r
(1rn) corresponds to the number of consecutive MEs (length of sliding window). For each r
a function fr(x1,…,xr) of r real-valued arguments (named the acceptability function) is defined
in such a manner that fr<0 constitutes the failure. The MSWS fails if at least one of the
functions fr(x1,…,xr) over the performance rates of any r consecutive MEs (for r) is
negative.
Note that the special case of MSWS in which all of the n MEs are identical and have two
states with performance rates 0 and 1 respectively, ={r} and
r
fr(x1,…,xr)= xi k r 1
i 1
is k-out-of-r-from-n:F system.
The introduction of the MSWS model is motivated by the following examples.
3
(1)
Service system.
Consider a sequence of service stations in which each station should process the same
sequence of n different tasks. Each station i can process ri incoming tasks simultaneously
according to first-in-first-out rule using a limited resource wi. Each incoming task can have
different states and the amount of the resource needed to process the task is different for each
state of each task. The total resource needed to process ri consecutive tasks should not exceed
the available amount of the resource wi. If in at least one of the stations there is no available
resource to process ri tasks simultaneously, the system fails.
The simplest example of such a model is a transportation system in which n randomly
ordered containers are carried by consecutive conveyors characterized by a different length
and maximal allowable load. The number of containers ri that are loaded on each conveyor i
is defined by its length. The transportation system fails if the total load of any one of the
conveyors is greater than its maximal allowed load wi.
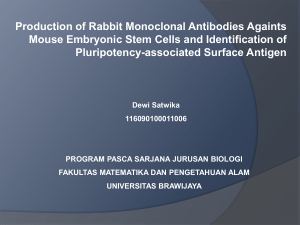
An example of the transportation system is presented in Fig. 1. The system consists of
three conveyors and transports n=14 randomly ordered containers of four types (each type m
is characterized by its weight gm). The first conveyor can simultaneously carry r1=2
containers, the second and third conveyors can carry r2=6 and r3=3 containers respectively.
The maximal allowable loads of conveyors 1, 2 and 3 are w1, w2 and w3 respectively. The
system fails if the total weight of any two adjacent containers is greater than w1 or if the total
weight of any six adjacent containers is greater than w2 or if the total weight of any three
adjacent containers is greater than w3. The weight of j-th container in the line can be
represented by a random value Gj: G j {g1, g2 , g3, g4} . The system acceptability function
can be determined as:
h ri 1
f ri (Gh ,..., Gh ri 1) wi G j , 1 i 3
j h
4
for any group of ri adjacent containers starting with h-th one (r1=2, r2=6, r3=3).
The system reliability takes the form:
3 15 ri
h ri 1
i 1 h 1
j h
R=Pr{
( wi- G j 0)}, r1=2, r2=6, r3=3,
(where Pr{x} is the probability of event x).
Manufacturing.
Consider a heating system that should provide a certain temperature along several lines
with moving parts placed at different distances from the heaters. The temperature at each
point of the line i is determined by a cumulative effect of ri closest heaters. Each heater
consists of several electrical heating elements. The heating effect of each heater depends on
the availability of its heating elements and therefore can vary discretely (if the heaters are
different, the number of different levels of heat radiation and the intensity of the radiation at
each level are specific to each heater). In order to provide the temperature, which is not less
than some specified value at each point of line i, any ri adjacent heaters should be in states
where the sum of their radiation intensity is greater than the minimum allowed level wi. If any
group of ri adjacent heaters provides the cumulative radiation intensity lower than wi the
system fails.
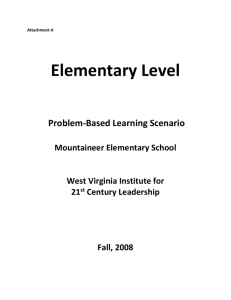
In the example presented in Fig. 2 there are 12 heaters providing random radiation
intensity Gj (1j12). The parts located at any point of the close conveyor are heated by three
adjacent heaters. The cumulative heating intensity along this conveyor should not be lower
than w1. The parts located at any point of the remote conveyor are heated by five adjacent
heaters. The cumulative heating intensity along this conveyor should not be lower than w2.
5
The system fails if any three adjacent heaters fail to provide the desired heating intensity w1 or
if any five adjacent heaters fail to provide the desired heating intensity w2. The system
acceptability function can be defined as:
f ri (Gh ,..., Gh ri 1)
h ri 1
G j wi , 1 i 2
j h
for any group of ri adjacent heaters starting with h-th one (r1=3, r2=5).
The system reliability takes the form:
2 13 ri h ri 1
R=Pr{
(
i 1 h 1
G j -wi 0 )}, r1=3, r2=5.
j h
A variety of other systems also fit the model: quality control systems that detect
deviations from given values of parameters in a sample of products, combat systems that
should provide certain fire density along a defense line, etc.
2. MSWS model
All n ordered MEs of MSWS are mutually statistically independent. The functioning of
each ME j is characterized by its random performance rate Gj. Each ME j can be in one of Hj
different states. Each state h{1,…,Hj} of ME j is characterized by its probability pj,h and
Hj
performance rate gj,h: pj,h=Pr{Gj = gj,h }, p j ,h 1 .
h 1
The set contains different positive integer numbers not greater than n (note that the
cardinality of cannot be greater than n). An acceptability function fr for each r maps r
real valued arguments to the set of real values such that negative values correspond to the
system failure. The entire system fails if for any r at least one of the functions fr(G1,…,Gr),
fr(G2,…,Gr+1), …, fr(Gn-r+1,…,Gn) produces a negative value.
The MSWS reliability is, therefore, defined as follows:
6
R=Pr{
n r 1
( fr(Gi,…,Gi+r-1)0)}.
r h 1
(2)
The following section describes the algorithm for evaluating the MSWS reliability.
3. MSWS reliability evaluation algorithm
The algorithms [7-11] suggested for evaluating reliability of linear consecutive k-out-ofr-from-n:F system are based on the binary nature of the system elements and, therefore,
cannot be used for MSWS. The procedure used in this paper for MSWS reliability evaluation
is based on the universal z-transform, also called u-function or universal moment generating
function technique, which was introduced in [22] and which proved to be very effective for
the reliability evaluation of different types of multi-state systems [23-29]. The u-function
extends the widely known ordinary moment generating function. The essential difference
between the ordinary and universal generating functions is that the latter allows one to
evaluate probabilistic distributions of overall performance for a wide range of systems
characterized by different topology, the different nature of interaction among system
elements, and the different physical nature of the elements' performance measures.
3.1. Determination of u-functions for individual MEs and their groups
The u-function of a discrete random variable X is defined as a polynomial
K
u( z ) qk z xk ,
(3)
k 1
where the variable X has K possible values and qk is the probability that X is equal to xk.
In our case, the u-function can define a ME performance rate distribution (PRD), i.e. it
represents all of the possible states of the ME j by relating the probabilities of each state pj,h to
the performance rate gj,h of the ME in the form:
7
Hj
u j ( z ) p j ,h z
g j ,h
(4)
h 1
In order to represent the PRD of a group consisting of r MEs one has to modify the ufunction by replacing the random value X with the random vector Y={Y(1),…,Y(r)} consisting
of random performance values corresponding to all the MEs belonging to the group (this
replacement produces a vector-u-function).
Element Y(j) of vector Y is equal to the performance rate of j-th one out of r consecutive
MEs. When the i-th group of MEs is considered (the group of MEs numbered from i to i+r-1)
the random variable Y(j) represents the random performance of the i+j-1-th ME and takes the
values from the set { gi j 1,1,..., gi j 1, H i j 1 }. Each combination of states of MEs belonging
to the group constitutes a state of the group. The total number of different states of the i-th
group is equal to the number of possible combinations of the states of the individual MEs
belonging to the group. Since all the MEs are statistically independent and each ME j has Hj
states, the total number of states of the group is
r
Ei,r= H i j 1 .
(5)
j 1
Therefore the vector-u-function Ui,r(z) corresponding to i-th group of r MEs consists of
Ei,r different terms.
Consider a state m of the i-th group that corresponds to state hj of each individual ME j:
iji+r-1. The performance values of the elements of the i-th group in state m are represented
by the realization ym of the random vector Y: ym={ gi ,hi ,..., gi r 1,hir 1 }. The probability of
any state of the group is equal to the product of the probabilities of the corresponding states of
the individual independent MEs.
For example, the vector-u-function for a group of two MEs i and i+1 (r=2) takes the
form:
8
Hi
U i ,2 ( z )
Hi 1
qhi ,hi1 z
{ gi ,hi ,gi 1,hi 1 }
,
(6)
hi 1 hi 11
where qhi ,hi1 is a probability of an event in which ME i is in state hi and ME i+1 is in state
hi+1. It can be easily seen that for the statistically independent MEs qhi ,hi pi ,hi pi1,hi1 .
Therefore, the vector-u-function of the group can be obtained by applying the following
operator over u-functions of individual MEs:
Hi
U i ,2 ( z ) Ω (ui ( z ) ,ui 1 ( z )) Ω ( pi ,hi z
Hi
hi 1
H i 1
pi ,hi pi1,hi1
gi ,hi
H i 1
, pi 1,hi 1 z
gi 1,hi 1
)
hi 11
{g
g
}
z i ,hi , i 1,hi 1 .
(7)
hi 1 hi 11
Applying the operator over u-functions of r consecutive MEs one obtains the vector-ufunction corresponding to the group containing these MEs:
Hi Hi 1
U i ,r ( z )
Hi r 1
hi 1hi 11
hi r 11
Ω (ui ( z ), ui 1 ( z ),..., ui r -1 ( z ))
... pi ,hi pi1,hi1 ... pir 1,hir 1 z
{ gi ,hi ,gi 1,hi 1 ,...,gi r 1,hi r 1 }
(8)
Simplifying this representation one obtains:
Ei ,r
U i ,r ( z ) Qm z ym ,
m 1
(9)
where Qm is the probability that the i-th group is in state m and vector ym consists of values of
MEs performance rates at state m. The obtained vector-u-function defines all of the possible
states of the i-th group of r MEs. Having the vectors ym representing performance rates of
MEs belonging to the i-th group in any state m one can obtain the acceptability function of the
group in this state as fr(ym). By summing the probabilities of all of the states in which the
acceptability function is negative, one can obtain the probability of failure of the i-th group of
r consecutive MEs. To do so one can use the following operator r:
Ei ,r
r (U i,r ( z )) Qm1( f r ( y m )) ,
m1
9
(10)
where
0, x 0
1( x)
1, x 0 .
Example 1.
Consider a system consisting of two MEs with random performances G1 and G2. The
PRD of the elements are Pr{G1=3}=0.6, Pr{G1=1}=0.4 and Pr{G2=1}=0.2, Pr{G2=2}=0.6,
Pr{G2=0}=0.2. According to Eq. (4) the u-functions of the elements take the form
u1(z)=0.6z3+0.4z1, u2(z)=0.2z1+0.6z2+0.2z0.
Following Eq. (8) we obtain the vector-u-function for the group of these two MEs as
U1,2 ( z ) Ω (u1 ( z ), u2 ( z )) 0.6 0.2 z{3,1} 0.4 0.2 z{1,1} 0.6 0.6 z{3,2}
0.4 0.6 z{1,2} 0.6 0.2 z{3,0} 0.4 0.2 z{1,0} 0.12 z{3,1} 0.08 z{1,1} 0.36 z{3,2}
0.24 z{1,2} 0.12 z{3,0} 0.08 z{1,0}.
3.2. Determination of u-functions for all the groups of r consecutive MEs
Note that the MSWS considered contains exactly n-r+1 groups of r consecutive MEs and
each ME can belong to no more than r such groups. To obtain the u-functions corresponding
to all the groups of r consecutive MEs the following procedure is introduced:
1. Define u-function U1-r,r(z) as follows
U1-r,r(z)= z
y0
,
(11)
where the vector y0 consists of r zeros.
2. Define the following operator over vector-u-function Ui,r(z) and u-function of
individual ME ui+r(z):
Ei ,r
Hi r
m1
h 1
Ψ (U i ,r ( z ) ,ui r ( z )) Ψ ( Qm z y m , pi r ,h z
g j ,h
Ei ,r H i r
) Qm pi r ,h z
m1 h 1
( ym ,gi r ,h )
, (12)
where operator over arbitrary vector y and value x shifts all the vector elements one position
left: y(s-1)=y(s) for 1<sr and assigns the value x to the last element of y: y(r)=x (the first
element of vector y disappears after applying the operator). The operator removes the
10
performance value of the first ME of the group and adds the performance value of the next
(not considered yet) ME to the group preserving the order of MEs belonging to the group.
Therefore, applying the operator over vector-u-function representing performance
distribution of the i-th group of r MEs one obtains the vector-u-function representing the
performance distribution of the i+1-th group (when the MEs from 1 to i are in certain states).
3. Using the operator in sequence as follows:
U j 1r ,r ( z ) Ψ ( U j r ,r ( z ) ,u j ( z ))
(13)
for j=1,…,n one obtains vector-u-functions for all of the possible groups of r consecutive
MEs: U1,r(z), …, Un-r+1,r(z). Note that the vector-u-function for the first group U1,r(z) is
obtained after applying the operator r times. In the vector-u-function Ui,r(z) (for i>0), value
y(j) of vector y corresponds to the performance rate of ME i+j-1.
Consider a vector-u-function Ui,r(z). For each combination of values y(2),…,y(r) it
contains exactly Hi different terms corresponding to different values of y(1), which takes all of
the possible values of the performance rate of ME i. After applying operator, y(1)
disappears from the vector y being replaced with y(2). This produces Hi terms with the same
vector y in the vector-u-function Ui+1,r(z). The coefficient of each term corresponding to
vector y is equal to the conditional probability that the i+1-th group of MEs has performance
rates y given ME i has one of its possible performance rates. By summing these coefficients
(collecting like terms in Ui+1,r(z)), one obtains a single term for each vector y with a
coefficient equal to the overall probability that the i+1-th group of MEs has performance rates
i r 1
y. Therefore, the number of different terms in each vector-u-function Ui,r(z) is equal to H j .
j i
11
Example 2.
Consider the previous example and add to the system a new element with PRD
Pr{G3=4}=0.7, Pr{G1=0}=0.3. Using the recursive equation (13) and operator (12) we obtain
the vector-u-functions corresponding to all of the groups of r=2 MEs.
U-1,2(z)=z{0,0}.
U0,2(z)=(U-1,2(z),u1(z))=(z{0,0},0.6z3+0.4z1)=0.6z{0,3}+0.4z{0,1};
U1,2(z)=(U0,2(z),u2(z))=( 0.6z{0,3}+0.4z{1,2},0.2z1+0.6z2+0.2z0)=0.6z{0,3}+0.4z{1,2}=
0.12 z{3,1} 0.08 z{1,1} 0.36 z{3,2} 0.24 z{1,2} 0.12 z{3,0} 0.08 z{1,0} .
This vector-u-function is equal to one obtained in Example 1 for the group of the two first
MEs. Applying the operator once more we obtain the vector-u-function representing the
PRD of the next group of MEs (second and third MEs)
U2,2(z)=(U1,2(z),u3(z))=
(0.12 z{3,1} 0.08 z{1,1} 0.36 z{3,2} 0.24 z{1,2} 0.12 z{3,0} 0.08 z{1,0}, 0.7 z 4 0.3z 0 )
0.7(0.12 z{1,4} 0.08 z{1,4} 0.36 z{2,4} 0.24 z{2,4} 0.12 z{0,4} 0.08 z{0,4} )
0.3(0.12 z{1,0} 0.08 z{1,0} 0.36 z{2,0} 0.24 z{2,0} 0.12 z{0,0} 0.08 z{0,0} ).
This procedure produced H1=2 terms for each value of the vector y (representing combination
of values G2 and G3). The first term corresponds to the conditional probability
Pr{ G2 g2,h2 G3 g3,h3 | G1 3 }
and the second term corresponds to the conditional probability
Pr{ G2 g2,h2 G3 g3,h3 | G1 1 }.
Collecting the like terms in U2,2(z) gives the unconditional PRD of the group of MEs 2
and 3:
U 2,2 ( z ) 0.7(0.2 z{1,4} 0.6 z{2,4} 0.2 z{0,4} ) 0.3(0.2 z{1,0} 0.6 z{2,0} 0.2 z{0,0} )
0.14 z{1,4} 0.42 z{2,4} 0.14 z{0,4} 0.06 z{1,0} 0.18 z{2,0} 0.06 z{0,0}.
12
Applying the operator r (9) to the vector-u-functions U1,r(z), …, Un-r+1,r(z) one can obtain
the failure probability for each group of r consecutive MEs.
3.3. Failure probabilities for groups with different numbers of consecutive elements
Let set contains different integer numbers and rmin, rmax are the minimal and maximal
numbers from respectively. Defining the vector-u-function U1-rmax,rmax(z) in the form (11) and
applying the operator (13) for j=1,…,n one obtains distributions for all of the possible
vectors of ME parameters of rmax consecutive MEs. Note that the considered vectors y of
length rmax also contain all of the possible vectors of the smaller length. Consider an integer
number r, r<rmax. The last r elements of vectors y in the vector-u-functions U1-rmax+r,rmax(z),
U2-rmax+r,rmax(z),…, Un-rmax+1,rmax(z) represent all of the possible vectors of performances of r
consecutive MEs. Therefore in each vector-u-function U j 1rmax,rmax ( z ) obtained by the
recursive operator (13) for rminjn one can obtain the failure probability of groups of r
consecutive MEs for all r satisfying condition r j by applying operators r in which r last
elements of vectors y are arguments of acceptability functions fr.
3.4. Algorithm for MSWS reliability evaluation
Theorem. The following algorithm obtains the reliability of MSWS:
1. Initialization:
F=0; U1-rmax,rmax(z)= z
y0
.
Determine u-functions of the individual MEs using Eq. (4).
2. Main loop:
Repeat the following for j=1,…,n:
13
2.1. Obtain U j 1rmax,rmax ( z) Ψ ( U j rmax,rmax ( z),u j ( z)) and collect like terms in the
obtained vector-u-function.
2.2. For each r if jr add value r (U j 1rmax,rmax ( z)) to F and remove all of the terms
with fr(y)<0 from U j 1rmax,rmax ( z ) (function fr(y) should always be applied over the
last r elements of vector y).
3. Obtain the MSWS reliability as R=1-F. Alternatively, the system reliability can be
obtained as the sum of the coefficients of the last vector-u-function U n1rmax,rmax ( z ) .
Proof:
The theorem can be proved by induction:
Basis step.
First, consider the vector-u-function U rmin 1rmax ,rmax that was obtained by applying the
-operator first rmin times (no like term collection and term removal can be performed until
obtaining U rmin 1rmax ,rmax ). The vector-u-function contains E1,rmin terms corresponding to
all the possible combinations of states of the first rmin MEs. According to its definition, the
operator rmin gives the failure probability for the group of MEs 1,…, rmin.
Induction step.
Assume now that after applying steps 2.1 and 2.2 of the algorithm e times (e>rmin) we
have obtained F equal to the probability of failure for the group of elements 1,…,e and the
terms remaining in the vector-u-function Ue1rmax ,rmax correspond to the states of the first e
MEs in which the values of the acceptability functions f ri are not negative for any i. We have
to prove that after applying steps 2.1 and 2.2 of the algorithm one time more F will be equal
to the probability of failure for the group of elements 1,…,e+1.
14
The vector-u-function corresponding to the group of first e elements can be represented
as follows:
n1
n2
m 1
l 1
U1,e ( z ) Qm z ym Ql* z y*l
(14)
Where ym and y*l are e-length vectors corresponding to normal and failure states respectively;
Qm and Q*l are probabilities of the corresponding states, n1 n2 E1,e . According to our
assumptions, after applying steps 2.1 and 2.2 e times
n2
F Ql*
(15)
l 1
and all the terms corresponding to the failure states are removed from the vector-u-function.
In order to obtain the vector-u-function corresponding to the group of first e+1 elements
one has to consider E1,e 1 realizations of a random vector of length e+1. These realizations
can be obtained by adding e+1-th element to vectors ym and y*m . The corresponding vector-ufunction takes the form:
H e 1
U1,e 1( z )
j 1
n1
{ ym , g e 1, j }
pe 1, j ( Qm z
m 1
n2
{ y*l , g e 1, j }
Ql*z
l 1
).
(16)
Since in this vector-u-function all the terms corresponding to failures in group of elements
1,…,e also correspond to failures in group of elements 1,…,e+1 independently of the state of
e+1-th element, the total probability of these states is equal to
H e 1
j 1
n2
H e 1
l 1
j 1
pe 1, j Ql* (
n2
n2
l 1
l 1
pe 1, j ) Ql* 1 Ql* F .
(17)
The additional failures can be caused only by combinations of states in groups of
elements including e+1-th ME (these groups correspond to last ri elements of the vectors and,
therefore, cannot consist of more than rmax elements).
15
The probability of these additional failures can be obtained applying delta operators over
the part of U1,e+1(z) corresponding to the normal state combinations of MEs 1,…,e:
H e 1
ri (
j 1
n1
{ ym , g e 1, j }
pe 1, j Qm z
m 1
).
(18)
(Note that some state combinations of ri MEs can simultaneously violate several conditions
f ri 0 for different i. In order to consider each failure combination only once the terms
corresponding to the failures should be removed after applying each operator ri ).
The total failure probability of the group of e+1 MEs is equal to
F+
H e 1
ri (
ri , ri e 1
j 1
n1
{ ym , g e 1, j }
pe 1, j Qm z
m 1
).
(19)
Since no more than rmax last elements of the vectors y should be considered when
applying the operators ri , the rest of the elements can be removed and the terms with
identical exponents can be collected.
Observe that in order to obtain the failure probability for the group of e+1 MEs we
performed a procedure that is equivalent to applying the operator over vector-u-function
Ue1rmax,rmax and adding the values of ri (Ψ (Ue1rmax,rmax )) to F. Therefore, after applying
step 2 of the algorithm e+1 times F is equal to the failure probability (unreliability) of the
group of e+1 MEs.
Example 3
3
4
j 1
j 1
Consider a MSWS with n=5, ={3,4}, f3(x1, x2, x3)= x j 5 , f4(x1, x2, x3, x4)= x j 6 .
Each ME has two states: total failure (corresponding to a performance rate of 0) and
functioning with a nominal performance rate. The nominal performance rates of the MEs are
2, 2, 3, 1, and 2 respectively.
16
In the initial step of the algorithm the value of 0 is assigned to F.
The u-functions of the individual MEs are:
u1(z)=p1,1z0+p1,2z2, u2(z)=p2,1z0+p2,2z2, u3(z)=p3,1z0+p3,2z3,
u4(z)=p4,1z0+p4,2z1, u5(z)=p5,1z0+p5,2z2.
Since in the MSWS considered rmax=4, the initial vector-u-function takes the form
U-3,4(z)=z{0,0,0,0}.
Following step 2 of the algorithm we obtain:
for j=1
U-2,4(z)=(U-3,4(z),u1(z))=(z{0,0,0,0}, p1,1z0+p1,2z2)=p1,1z{0,0,0,0}+p1,2z{0,0,0,2},
for j=2
U-1,4(z)=(U-2,4(z),u2(z))=(p1,1z{0,0,0,0}+p1,2z{0,0,0,2}, p2,1z0+p2,2z2)=
p1,1p2,1z{0,0,0,0}+p1,2p2,1z{0,0,2,0}+p1,1p2,2z{0,0,0,2}+ p1,2p2,2z{0,0,2,2},
for j=3
U0,4(z)=(U-1,4(z), u3(z))=
( p1,1p2,1z{0,0,0,0}+p1,2p2,1z{0,0,2,0}+p1,1p2,2z{0,0,0,2}+ p1,2p2,2z{0,0,2,2}, p3,1z0+p3,2z3)=
p1,1p2,1p3,1z{0,0,0,0}+p1,2p2,1p3,1z{0,2,0,0}+p1,1p2,2p3,1z{0,0,2,0}+
p1,2p2,2p3,1z{0,2,2,0}+p1,1p2,1p3,2z{0,0,0,3}+p1,2p2,1p3,2z{0,2,0,3}+p1,1p2,2p3,2z0,0,2,3}+
p1,2p2,2p3,2z{0,2,2,3}.
In this step, operator 3 should be applied to U0,4(z). The terms of U0,4(z) with f3<0 are marked
in bold. The value of 3(U0,4(z))=p1,1p2,1p3,1+p1,2p2,1p3,1+p1,1p2,2p3,1+p1,2p2,2p3,1+p1,1p2,1p3,2 is
added to F.
After removing the marked terms, U0,4(z) takes the form:
U0,4(z)=p1,2p2,1p3,2z{0,2,0,3}+p1,1p2,2p3,2z{0,0,2,3}+p1,2p2,2p3,2z{0,2,2,3}.
Proceeding for j=4 we obtain
U1,4(z)=(U1,4(z), u4(z))=
17
(p1,2p2,1p3,2z{0,2,0,3}+p1,1p2,2p3,2z{0,0,2,3}+p1,2p2,2p3,2z{0,2,2,3}, p4,1z0+p4,2z1)=
p1,2p2,1p3,2p4,1z{2,0,3,0}+p1,1p2,2p3,2p4,1z{0,2,3,0}+p1,2p2,2p3,2p4,1z{2,2,3,0}+
p1,2p2,1p3,2p4,2z{2,0,3,1}+p1,1p2,2p3,2p4,2z{0,2,3,1}+p1,2p2,2p3,2p4,2z{2,2,3,1}
Both operators 3 and 4 should be applied to U1,4(z).The terms of U1,4(z) with f3<0 are
marked in bold, the terms with f4<0 are underlined. One can see that in the first term both f3<0
and f4<0, in the second term only f4<0 and in the fourth term only f3<0.
First the value of 3(U1,4(z))=p1,2p2,1p3,2p4,1+p1,2p2,1p3,2p4,2 is added to F and the terms
with f3<0 are removed. Then in the remaining vector-u-function U1,4(z) the value of
4(U1,4(z))=p1,1p2,2p3,2p4,1 is added to F and the terms with f4<0 are removed.
After removing all of the marked terms, U1,4(z) takes the form:
U1,4(z)=p1,2p2,2p3,2p4,1z{2,2,3,0}+p1,1p2,2p3,2p4,2z{0,2,3,1}+p1,2p2,2p3,2p4,2z{2,2,3,1}.
Finally for j=5
U2,4(z)=(U1,4(z), u5(z))=
(p1,2p2,2p3,2p4,1z{2,2,3,0}+p1,1p2,2p3,2p4,2z{0,2,3,1}+p1,2p2,2p3,2p4,2z{2,2,3,1}, p5,1z0+p5,2z2)=
p1,2p2,2p3,2p4,1p5,1z{2,3,0,0}+(p1,1+p1,2)p2,2p3,2p4,2p5,1z{2,3,1,0}+
p1,2p2,2p3,2p4,1p5,2z{2,3,0,2}+(p1,1+p1,2)p2,2p3,2p4,2p5,2z{2,3,1,2}
The terms of U2,4(z) with f3<0 are marked in bold and the terms with f4<0 are underlined.
After adding the value of 3(U2,4(z))=p1,2p2,2p3,2p4,1p5,1+(p1,1+p1,2)p2,2p3,2p4,2p5,1 to F and
removing the corresponding terms from U2,4(z), this vector-u-function does not contain terms
with f4<0. Now F is equal to the system unreliability and R=1-F.
The final vector-u-function U2,4(z) takes the form:
U2,4(z)=p1,2p2,2p3,2p4,1p5,2z{2,3,0,2}+(p1,1+p1,2)p2,2p3,2p4,2p5,2z{2,3,1,2}.
The MSWS reliability can also be obtained as the sum of the coefficients of the resulting
vector-u-function:
18
R=p1,2p2,2p3,2p4,1p5,2+(p1,1+p1,2)p2,2p3,2p4,2p5,2=p2,2p3,2p5,2(p1,2p4,1+p1,1p4,2+p1,2p4,2)=
p2,2p3,2p5,2(1-p1,1p4,1).
Observe that the total number of evaluations of the acceptability functions in the
presented example is 24: f3 has been evaluated 8, 6 and 4 times in U0,4(z), U1,4(z) and U2,4(z)
respectively, f4 has been evaluated 4 and 2 times in U1,4(z) and U2,4(z) respectively (f4 is
evaluated after removing the terms with f3<0).
Consider an alternative enumerative reduction procedure:
1. List all of the possible combinations of the ME performances;
2. Remove from the list any combination for which f4<0. (In order to evaluate values of
f4 for each combination of five numbers two functions f4(x1, x2, x3, x4) and f4(x2, x3, x4,
x5) should be evaluated).
3. Remove from the remaining list any combination for which f3<0. (In order to evaluate
values of f4 for each combination of five numbers three functions f3(x1, x2, x3), f3(x2, x3,
x4) and f3(x3, x4, x5) should be evaluated).
4. Obtain the probability of the remaining combinations.
The proceeding of the second step of the enumerative reduction procedure is presented in
Table 1. The combinations removed after evaluating f4(x1, x2, x3, x4) are marked in bold, the
combinations removed after evaluating f4(x2, x3, x4, x5) are underlined. The total number of
evaluations of function f4 in this step is 24+2·8=40 (24 terms were removed after evaluating
the function f4(x1, x2, x3, x4), for the remaining 8 terms both f4(x1, x2, x3, x4) and f4(x2, x3, x4, x5)
were evaluated).
The proceeding of the third step of the enumerative reduction procedure is presented in
Table 2. There are no combinations removed after evaluating f3(x1, x2, x3), the combination
19
removed after evaluating f3(x2, x3, x4) is marked in bold, the combinations removed after
evaluating f3(x3, x4, x5) are underlined. The probabilities of the remaining combinations are
p1,2p2,2p3,2p4,2p5,2 for the combination 2,2,3,1,2;
p1,2p2,2p3,2p4,1p5,2 for the combination 2,2,3,0,2;
p1,1p2,2p3,2p4,2p5,2 for the combination 0,2,3,1,2.
The system reliability is equal to the sum of these probabilities:
R=p1,2p2,2p3,2p4,2p5,2+p1,2p2,2p3,2p4,1p5,2+p1,1p2,2p3,2p4,2p5,2=p2,2p3,2p5,2(1-p1,1p4,1).
The total number of evaluations of function f3 in this step is 2·1+5·3=17 (One term was
removed after evaluating the functions f3(x1, x2, x3) and f3(x2, x3, x4). For the remaining 5 terms
all of the three functions were evaluated).
The total number of evaluations of the acceptability functions in the enumerative
procedure is 57. Observe that the suggested algorithm based on the universal moment
generating function technique requires more than two times less evaluations of the
acceptability functions than the enumerative procedure.
4. Computational complexity of the algorithm
During the algorithm execution, the operator should be applied n times to vector-ufunctions U j 1rmax,rmax . According to the nature of the operator (defined by Eq. (12)) the
complexity of the entire algorithm (proportional to the number of evaluations of the
acceptability functions) depends on the number of terms in the resulting vector-u-functions.
Since the vectors y in the vector-u-functions contain no more than rmax elements, that cannot
take more than H max max {H j } different values, the number of terms in any
1 j n
U j 1rmax,rmax cannot exceed ( H max ) rmax .
20
The u-functions U j 1rmax,rmax for j<rmax have no more than ( H max ) j terms (since the
vectors y have no more than j nonzero elements), and for jrmax have no more than
( H max ) rmax terms. Therefore the upper bound for the algorithm complexity can be estimated
as
rmax
H max
rmax
j
r
(
n rmax ) . (20)
H max (n rmax ) H max max H max
H max 1
j 1
This upper bound complexity estimation is obtained without taking into account the
removal of terms corresponding to system failures from the vector-u-function. The efficiency
of the term removal strictly depends on the nature of acceptability functions and, therefore,
cannot be estimated theoretically. The less the system reliability the greater the effect of the
term removal operations. Usually the algorithm complexity is much less than the estimation
(20).
Example4.
Consider a MSWS with n=10. The parameters of the system MEs are presented in Table
3. The different MEs have a different number of states.
The system reliability is defined by three acceptability functions:
3
5
7
j 1
j 1
j 1
={3,5,7}, f3(x1,x2,x3)= x j w3 , f5(x1,…,x5)= x j w5 , f7(x1,…,x7)= x j w7 .
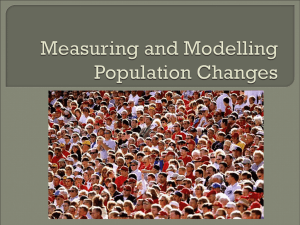
The graphs of the MSWS reliability as a function of the demands R(w3,w5,w7) obtained by
the C language realization of the algorithm are presented in Fig. 3. Observe that the system
reliability is a stepwise function of the demands w3, w5 and w7 since the sum of the elements'
performance rates for groups of consecutive MEs can take discrete values. Therefore the
demand variation within the range between the two closest possible values of cumulative
group performance does not affect the system reliability.
21
The execution time of the C language program for evaluating the reliability of systems
with n<30, Hmax<6 and rmax<8 did not exceed 1 sec on Pentium 4 PC.
5.
Conclusions
The paper introduces the model of linear multi-state multiple sliding window system,
motivated by service systems, manufacturing and quality control systems etc. The algorithm
developed for evaluating the system reliability is based on the universal generating function
technique. The complexity of the suggested algorithm (measured as the number of evaluations
of the acceptability functions) is much lower than the complexity of the enumerative
procedure because of the term removal and like term collection techniques that reduce the size
of u-functions representing the performance distributions of groups of the MEs. The program
realization of the algorithm obtains the reliability for systems of moderate size in the time not
exceeding 1 second.
References
[1] W. Griffith, "On consecutive k-out-of-n failure systems and their generalizations", A. P. Basu (ed),
Reliability and Quality Control, 1986, pp. 157-165; Elsevier (North-Holland).
[2]. Y. Tong, "A rearrangement inequality for the longest run with an application in network reliability", J.
Applied Probability, vol. 22, 1985, pp. 386-393.
[3] B. Saperstain, "The generalized birthday problem", J. Amer. Statistical Assoc, vol. 67, 1972, pp. 425-428.
[4] B. Saperstain, "On the occurrence of n successes within N Bernoulli trails", Technometrics, vol. 15, 1973, pp.
809-818.
[5] J. Naus, "Probabilities for a generalized birthday problem", J. Amer. Statistical Assoc, vol. 69, 1974, pp. 810815.
[6] J. Nelson, "Minimal-order models for false-alarm calculations on sliding windows", IEEE Trans. Aerospace
Electronic Systems, vol. AES-14, 1978, pp. 351-363.
[7] S. Papastavridis, M. Sfakianakis, "Optimal-arrangement & Importance of the components in a consecutive-kout-of-r-from-n:F system", IEEE Transactions on Reliability, vol. 40, 1991, pp. 277-279
[8] M. Sfakianakis, S. Kounias, A. Hillaris "Reliability of consecutive-k-out-of-r-from-n:F systems", IEEE
Transactions on Reliability, vol. 41, 1992, pp. 442-447.
[9] J. Cai, "Reliability of a large consecutive-k-out-of-r-from-n:F system with unequal component-reliability ",
IEEE Transactions on Reliability, vol. 43, 1994, pp. 107-111.
[10] J. Malinowski, W. Preuss, "A recursive algorithm evaluating the exact reliability of a consecutive-k-withinm-out-of-n:F system", Microelectronics and Reliability, vol. 35, 1995, 1461-1465.
[11] Z. Psillakis, "A simulation algorithm for computing failure probability of a consecutive-k-out-of-r-from-n:F
system", IEEE Transactions on Reliability, vol. 44, 1995, pp. 523-531.
[12] D. Chiang, S. Niu, "Reliability of consecutive-k-out-of-n:F systems", IEEE Transactions on Reliability, vol.
R-30, 1981, pp. 87-89
22
[13] R. Bollinger, "Direct computations for consecutive-k-out-of-n:F systems", IEEE Transactions on
Reliability, vol. R-31, 1982, pp. 444-446.
[14] R. Bollinger A. Salvia, "Consecutive-k-out-of-n:F networks", IEEE Transactions on Reliability, vol. R-31,
1987, pp. 53-56.
[15] J. Wu, R. Chen, "An algorithm for computing the reliability of weighted-k-out-of-n systems", IEEE
Transactions on Reliability, vol. 43, 1994, pp. 327-328.
[16] G. Levitin, A. Lisnianski, "A new approach to solving problems of multi-state system reliability
optimization", Quality and Reliability Engineering International, vol. 47, 2001, pp. 93-104.
[17] F. Hwang, Y. Yao, "Multistate consecutively-connected systems ", IEEE Transactions on Reliability, vol.
38, 1989, pp. 472-474.
[18] J. Shanthikumar, "A recursive algorithm to evaluate the reliability of a consecutive-k-out-of-n:F system",
IEEE Transactions on Reliability, vol. R-31, 1982, pp. 442-443.
[19] J. Shanthikumar, "Reliability of systems with consecutive minimal cutsets ", IEEE Transactions on
Reliability, vol. R-36, 1987, pp. 546-550.
[20] A. Kossow, W. Preuss, "Reliability of linear consecutively-connected systems with multistate components",
IEEE Transactions on Reliability, vol. 44, 1995, pp. 518-522.
[21] M. Zuo, M. Liang, "Reliability of multistate consecutively-connected systems", Reliability Engineering &
System Safety, vol. 44, 1994, pp. 173-176.
[22] I. Ushakov, "Universal generating function", Sov. J. Computing System Science, vol. 24, No 5, 1986, pp.
118-129.
[23] G. Levitin, A. Lisnianski, "A new approach to solving problems of multi-state system reliability
optimization", Quality and Reliability Engineering International, vol. 47, 2001, pp. 93-104.
[24] G. Levitin, "Reliability evaluation for linear consecutively-connected systems with multistate elements and
retransmission delays", Quality and Reliability Engineering International, vol. 17, 2001.
[25] G. Levitin, "Evaluating correct classification probability for weighted voting classifiers with plurality
voting", European journal of operational research, vol. 141, pp. 596-607, 2002.
[26] G. Levitin, "Reliability evaluation for acyclic consecutively-connected networks with multistate elements",
Reliability Engineering & System Safety, vol. 73, pp. 137-143, 2001.
[27] G. Levitin, A. Lisnianski, "Optimal separation of elements in vulnerable multi-state systems", Reliability
Engineering & System Safety, vol. 73, pp. 55-66, 2001.
[28] G. Levitin, "Redundancy optimization for multi-state system with fixed resource requirements and
unreliable sources", IEEE Transactions on Reliability, vol. 50, pp. 52-58, 2000.
[29] G. Levitin, "Incorporating Common-Cause Failures into Non-Repairable Multi-State Series-Parallel System
Analysis", IEEE Transactions on Reliability, vol. 50, pp. 380-388, 2001.
23
Table 1. Second step of the
enumerative reduction procedure
x1
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x2
2
2
2
2
2
2
2
2
0
0
0
0
0
0
0
0
2
2
2
2
2
2
2
2
0
0
0
0
0
0
0
0
x3
3
3
3
3
0
0
0
0
3
3
3
3
0
0
0
0
3
3
3
3
0
0
0
0
3
3
3
3
0
0
0
0
x4
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
x5
2
0
2
0
2
0
2
0
2
0
2
0
2
0
2
0
2
0
2
0
2
0
2
0
2
0
2
0
2
0
2
0
Table 2. Third step of the
enumerative reduction procedure
x1 x2 x3 x4 x5
2 2 3 1 2
2 2 3 1 0
2 2 3 0 2
2 0 3 1 2
0 2 3 1 2
0 2 3 1 0
24
Table 3. Parameters of MSWS elements
No of ME
1
No of state
p
0.03
0.22
0.75
-
1
2
3
4
5
2
g
0
2
5
-
p
0.10
0.10
0.40
0.40
-
3
4
5
g p g p g p
0 0.17 0 0.05 0 0.08
1 0.83 6 0.25 3 0.20
2 - - 0.40 5 0.15
4 - - 0.30 6 0.45
- - - - - 0.12
25
6
7
8
9
g p g p g p g p g
0 0.01 0 0.20 0 0.05 0 0.20 0
1 0.22 4 0.10 3 0.25 4 0.10 3
2 0.77 5 0.10 4 0.70 6 0.15 4
4 - - 0.60 5 - - 0.55 5
5 - - - - - - - -
10
p
0.05
0.25
0.70
-
g
0
2
6
-
Figure Captions
Figure 1: Example of transportation MSWS.
Figure 2: Example of manufacturing MSWS.
Figure 3: Reliability of the MSWS as function of demands w3, w5 and w7.
26