A Micromorphic Electromagnetic Theory
advertisement

International Journal of Solids and Structures, submitted for publication
A Micromorphic Electromagnetic Theory
James D. Lee, Youping Chen and Azim Eskandarian
School of Engineering and Applied Science
The George Washington University
801 22nd street, NW, Academic Center
Washington, DC 20052
Email: jdlee@gwu.edu Fax: 202-994-0238
Abstract
This work is concerned with the determination of both macroscopic and microscopic
deformations, motions, stresses, as well as electromagnetic fields developed in the
material body due to external loads of thermal, mechanical, and electromagnetic origins.
The balance laws of mass, microinertia, linear momentum, moment of momentum,
energy, and entropy for microcontinuum are integrated with the Maxwell’s equations.
The constitutive theory is constructed. The finite element formulation of micromorphic
electromagnetic physics is also presented. The physical meanings of various terms in the
constitutive equations are discussed.
Keyword: micromorphic, electromagnetic, balance laws, constitutive relation, finite
element formulation.
1 Introduction
Optical phonon branches exist in all crystals that have more than one atom per primitive
unit cell. Under an electromagnetic field it is the optical modes that are excited. Optics is
a phenomenon that necessitates the presence of an electromagnetic field.
While classical continuum theory is the long acoustic wave limit, lattice dynamics
analysis has shown that micromorphic theory yields phonon dispersion relation similar to
those from atomistic calculations and experimental measurements (Chen et al [2002a]). It
provides up to 12 phonon dispersion relations, including 3 acoustic and 9 optical
branches. The optical phonons in micromorphic theory describe the internal displacement
patterns within the microstructure of material particles in consistent with the internal
atomic displacements in the optical modes.
The physics of mechanical and electromagnetic coupling is hence related to the optical
vibrations, and the continuum description of electrodynamics naturally leads to a
micromorphic electromagnetic theory.
2 Physical Picture of Micromorphic Theories
Micromophic Theory, developed by Eringen and Suhubi [1964] and Eringen [1999],
constitutes extensions of the classical field theories concerned with the deformations,
motions, and electromagnetic (E-M) interactions of material media, as continua, in
microscopic time and space scales. In terms of a physical picture, a material body is
envisioned as a collection of a large number of deformable particles, each particle
possesses finite size and microstructure. The particle has the independent degrees of
freedom for both stretches and rotations (micromorphic), and for rotations only
(micropolar), in addition to the classical translational degrees of freedom of the center,
and may be considered as a polyatomic molecule, a primitive unit cell of a crystalline
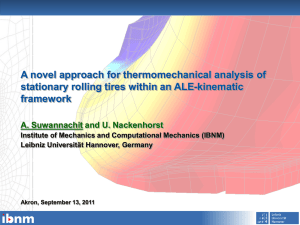
solid, or a chopped fiber in a composite, et al. As shown in Fig.2-1, a generic particle P
is represented by its position vector X (mass center of P) and by a vector attached to P
representing the microstructure of P in the reference state at time t = 0. The motions that
carry P( X , ) to P ( x , ξ , t ) in the spatial configuration (deformed state) at time t can be
expressed as
xk xk ( X , t ),
(2-1)
k kK ( X , t ) K .
(2-2)
It is seen that the macromotion, eqn. (2-1), accounts for the motion of the centroid of the
particle while the micromotion, eqn.(2-2), specifies the changing of orientation and
deformation for the inner structures of the particle. The inverse motions can be written as
X K X K ( x, t )
,
(2.3)
K Kk ( x, t )k
,
(2.4)
where
kK Kl kl , Kk kL KL .
P(X, )
P(x,,, t)
X
(2.5)
x
Fig. 2-1 the macro- and micro-motion of a material particle
3. The E-M Balance Laws
The balance laws of the micromorphic electromagnetic continuum consist of two parts:
the thermomechanical part and the electromagnetic (E-M) parts. The E-M balance laws
are the well-known Maxwell’s equations that can be written as
D qe
E
H
1 B
0
c t
or
B 0
or
1 D 1
J
c t c
Dk ,k q e ,
or
or
eijk E k , j
1 Bi
0,
c t
Bk ,k 0 ,
eijk H k , j
(3.1)
(3.2)
(3.3)
1 Di 1
Ji ,
c t
c
(3.4)
where D is the dielectric displacement vector, B the magnetic flux vector, E the electric
field vector, H the magnetic field vector, J the current vector, q e the free charge density.
The divergence of eq. (3.4) with the use of eq. (3.1) leads to
q e
J
0
t
,
(3.5)
which is the law of conservation of charge. The divergence of eq. (3.2) gives
( B ) 0
t
which is a duplicate of eq. (3.3).
The polarization vector, P , and the magnetization vector, M , are defined as
P D-E
,
(3.6)
M B-H
.
(3.7)
It is noted that the E-M vectors, D, E, P,B, H, M,J , are all referred to a fixed laboratory
frame RC . The Galilean transformations of inertial frames form a group that consists of
time-independent spatial rotations and pure Galilean transforms, i.e.,
xi* Rij x j Vi t bi
where
,
(3.8)
Rik R jk Rki Rkj ij
det( R) 1 .
and
(3.9)
The requirement of the form-invariance of the Maxwell’s equations under the Galilean
transformations leads to the following transformations (Eringen and Maugin [1990])
qe qe
*
,
J * J qe v
P* = P
1
M* = M v P
c
(3.10)
,
(3.11)
,
(3.12)
,
(3.13)
1
E* = E v B
c
,
(3.14)
1
B* = B v × E
c
,
(3.15)
1
D* = D ν × B
c
,
(3.16)
1
H* = H ν × D
c
,
(3.17)
*
where the quantities, qe , J * , P* , M * , E* ,B* , D* , H * , are referred to a co-moving frame
RG with material particles of the body having velocities, v . A typical nonrelativistic
feature of these transformations, eqs. (3.10-3.17), is the asymmetry between eq. (3.12)
and eq. (3.13), which says, according to Galilean relativity, a polarized moving body will
appear to be magnetized whereas a magnetized moving body will not appear to be
polarized. Although it is this lack of symmetry that started to stimulate the study of
relativistic electrodynamics in the early 20th century, it should be remarked that few
observable conclusions can be made due to the difficulty of obtaining sufficiently high
velocities for material media. The fully symmetric relativistic laws replacing eqs. (3.12,
3.13) may be found in Jackson [1975].
4. The Thermomechanical Balance Laws
The thermomechanical balance laws were originally obtained by Eringen and Suhubi
[1964] by means of a “microscopic space-averaging” process. Later, Eringen [1999] rederived the balance laws by starting with the following expression for the kinetic energy
of a material particle
K
1
(vi vi iklikil )
2
,
(4.1)
and, after the energy balance law is obtained, by requiring it to be form-invariant under
the generalized Galilean transformation to yield the balance laws of linear momentum
and moment of momentum. Recently, Chen et al. [2002] identified all the instantaneous
mechanical variables, corresponding to those in micromorphic theory, in phase space;
derived the corresponding field quantities in physical space through the statistical
ensemble averaging process; invoked the time evolution law and the generalized
Boltzmann transport equation for conserved properties to obtain the local balance laws of
mass, microinertia, linear momentum, moment of momentum, and energy for
microcontinuum field theory. In the case that the external field is the gravitational field,
the balance laws obtained by Chen et al. [2002] in a bottom–up approach agree perfectly
with those obtained by Eringen and Suhubi [1964] and Eringen [1999] in a top-down
approach.
The balance laws of micromorphic continuum with E-M interactions can be expressed as
v 0
di
i υ + υ i
dt
or
t ( f v) F 0
λ + t - s (l - σ ) L 0
vi ,i 0 ,
or
or
or
(4.2)
dikl
ikmlm ilmkm ,
dt
(4.3)
t ji , j ( fi vi ) Fi 0 ,
(4.4)
klm,k tml sml (llm lm ) Llm 0 , (4.5)
e λ υ t : v ( s - t PE * BM * ) : υ q h w
or
e klmlm,k tkl vl ,k (skl tkl El* Pk M l* Bk )lk qk ,k h w , (4.6)
where , v , i , υ , t , s s , λ , e , q are the mass density, velocity, microinertia,
microgyration, Cauchy stress, microstress average, moment stress, internal energy, heat
input, respectively; f , l , h are the body force, body moment, heat source of mechanical
origin, respectively; the spin inertia σ is defined as
kl iml (km knnm )
;
(4.7)
and the body force, body moment, energy source of E-M origin are given as (Eringen
and Maugin [1990], Eringen [1999], De Groot and Suttorp [1972]):
1
F q e E * ( P ) E * (B ) M * {J * P ( P )v P ( v )} B
c
L = PE* + M * B
,
,
(4.8)
(4.9)
W E* (P + P v) M * B + J * E*
.
(4.10)
The second law of thermodynamics, also referred to as the Clausius-Duhem inequality, is
written as
,
(4.11)
(q ) h 0
where is the entropy density and is the absolute temperature. Now the generalized
Helmholtz’s free energy is introduced as
e E* P
.
(4.12)
Then the Clausius-Duhem (C-D) inequality can be expressed as
( ) ijk jk ,i tij v j ,i ( sij tij E *j Pi M *j Bi ) ji
1
. (4.13)
qi ,i Pi Ei* M i* Bi J i* Ei* 0
5. Constitutive Relations
The fundamental laws of micromorphic electromagnetic continuum consist of a system of
27 partial differential equations, eqs. (3.1-3.4, 4.2-4.6), and one inequality, eq. (4.13).
There are 83 unknowns: , ikl , vk , kl , , , e , t kl , skl slk , klm , qk , q e , E k , Pk , Bk , M k , J k ,
considering that the body force, body moment, and heat source are given. Therefore 56
constitutive relations are needed to determine the dynamics of the thermomechanicalelectromagnetic system.
The generalized Lagrangian strain tensors of micromorphic theory are defined as
KL xk ,K Lk KL
,
(5.1)
KL kK kL KL LK
,
KLM Kk kL ,M
,
(5.2)
(5.3)
and the strain rates can be obtained as
KL (vl ,k lk ) xk , K Ll
,
(5.4)
KL (kl lk ) kK lL LK
(5.5)
.
(5.6)
KLM kl ,m Kk lL xm ,M
,
It can be easily proved that the Lagrangian strains and their material time rates of any
order are objective, and hence they are suitable for being employed as independent
constitutive variables in the development of a constitutive theory. In the same spirit,
define the Lagrangian forms of the electric field vector and the magnetic flux vector as
E K* Ek* xk ,K
,
(5.7)
BK Bk xk ,K
,
(5.8)
and their material time rates are obtained
EK* ( Ek* El*vl ,k ) xk , K
,
(5.9)
BK ( Bk Bl vl ,k ) xk , K
,
(5.10)
The generalized 2nd order Piola-Kirchhoff stress tensors of micromorphic theory are
defined as
TKL jtkl X k ,k lL
,
(5.11)
S KL jskl Kk Ll 2
,
(5.12)
KLM jmkl X M ,m kK Ll
,
(5.13)
where j det( xk , K ) is the jacobian of the deformation gradient. It is straightforward to
show
TKL KL SKL KL KLM KLM j{tkl (vl ,k lk ) skl( kl ) klmlm,k } ,
(5.14)
which means {T, S, Γ } are the thermodynamic conjugates of {α, β,γ} . Similarly, the
Lagrangian forms of the heat input, polarization, magnetization, and current are defined
as
QK jqk X K ,k
,
(5.15)
PK jPk X K ,k
,
(5.16)
M K* jM k* X K ,k ,
(5.17)
J K* jJ k* X K ,k
(5.18)
.
Now, the Clausius-Duhem inequality (4.13) can be rewritten as
m
m
o ( ) KLM KLM TKL
KL S KL
KL
,
1
QK , K PK EK* M K* BK J K* EK* 0
(5.19)
where
tklm tkl Pk El* M k* Bl
,
(5.19)
sklm skl M k* Bl M l* Bk slkm
,
(5.20)
m
TKL
jtklm X K ,k lL
,
(5.21)
m
S KL
jsklm Kk Ll 2
,
(5.22)
where the superscript ‘m’ refers to the mechanical parts, i.e., if there is no E-M
interaction, then t kl t klm . If it happens that P is proportional to E * and M * is proportional
to B , then there is no need to add terms to the Cauchy stress t and microstress average
s . This situation prevails in the case of isotropic fluids in both magnetohydrodynamics
and electrohydrodynamics. However, the general case is needed for ferroelectric and
ferromagnetic materials, and also for materials affected by intrinsic spin and/or electric
quadruples (Dixon and Eringen [1965]). It is remarked that the mechanical part of the
microstress average S m is also symmetric.
In this work, the independent and dependent constitutive variables are set to be
Y = {α, β,γ, , , E* ,B, X}
Z = {T m , S m , Γ, , ,Q, P, M * ,J * }
,
(5.23)
,
(5.24)
and, following the axiom of equipresence, at the outset the constitutive relations are
written as
Z = Z(Y)
.
(5.25)
It is noted that there are 56 dependent constitutive variables in Z and both Y and Z are
presented in Lagrangian forms and, hence, the axiom of objectivity is automatically
satisfied. Substituting eq. (5.25) into the C-D inequality (5.19), it follows
(
m
)
, K (TKLm
) KL ( S KL
) KL
, K
KL
KL
( KLM
KLM
) KLM ( PK
*
) EK ( M K*
) BK
*
EK
BK
.
(5.26)
1
QK , K J K* EK* 0
Since the inequality (5.26) is linear in , , α , β , γ , E * , B , it holds if and only if
(α, β,γ , , E* ,B, X )
,
(5.27)
,
(5.28)
Tm
α
,
(5.29)
Sm
β
,
(5.30)
Γ
γ
,
(5.31)
P
E *
,
(5.32)
,
(5.33)
,
(5.34)
M *
B
Q J * E * 0
these constitutive relations, eqs. (5.27-5.34), are further subjected to the axioms of
material invariance and time reversal. It may be stated as: the constitutive response
functionals must be form-invariant with respect to a group of transformations of the
material frame of reference { X X *} and microscopic time reversal
{ t t } representing the material symmetry conditions and these transformations must
leave the density and charge at ( X , t ) unchanged (Eringen and Maugin [1990]). It is
noticed that magnetic symmetry properties of solids cannot be discussed rationally by
means of three-dimensional point groups only since magnetism is the result of the spin
magnetic moment of electrons, which changes sign upon the time reversal. In other words,
diamagnetic and paramagnetic crystals do not exhibit any orderly distribution of their
spin magnetic moments, therefore they are ‘time symmetric’ and the crystallographic
point group is enough for the discussion of their material symmetries; on the other hand,
for ferromagnetic, ferrimagnetic and antiferromagnetic materials, which are characterized
by an orderly distribution of spin magnetic moment, an additional symmetry operator is
needed to take care of the time reversal. For a complete account of this subject, interested
readers are referred to Shubnikov and Belov [1964], Kiral and Eringen [1990].
6. Finite Element Formulation
The energy equation (4.6) can now be written as
QK , K h J K* EK* 0
,
(6.1)
Multiply eq. (6.1) by the variational temperature and then integrate over the
undeformed volume, it gives
V
dV QK , K dV dV Q* dS
V
V
Sq
,
(6.2)
where
h J K* EK*
,
(6.3)
and
Q* QK N K
,
(6.4)
is the heat input specified at S q , part of the surface S that enclosing the volume V and
N K is the outward normal to S . It is noted that S q S S , where S is part of the
surface on which the temperature is specified.
The balance laws of linear momentum and moment of momentum, eqs. (4-4, 4-5), can be
expressed in the Lagrangian forms as
m
(TKL
Li ), K ( fi vi ) 0
(6.5)
(LMK Li jM ), K j (t mji s mji ) (lij ij ) 0
(6.6)
where
~
f i f i { Fi ( Pj Ei* M *j Bi ), j }
.
(6.7)
Multiply eq. (6.5) and eq. (6.6) by the variational velocity vector vi and the variational
microgyration tensor ij , respectively, and then integrate the sum over the undeformed
volume, it leads to
{ T S }dV {v v }dV
{ f v l }dV T v dS dS
KLM
V
m
KL
KLM
KL
m
KL
KL
*
V
i
i
ij
ij
St
i
i
i
V
S
*
ij
i
ij
ij
,
(6.8)
ij
where
Ti* TKLm Li N K
ij* LMK Li jM N K
,
(6.9)
,
(6.10)
are the surface load and surface moment specified at S t and S , respectively. It is noted
that
S St Sv S S
,
(6.11)
where the velocity and the microgyration are specified on S v and S , respectively. In this
finite element formulation no restrictive assumption has been made to the magnitude of
any independent constitutive variables. The results are valid for coupled
thermomechanical-electromagnetic phenomena. It is seen, from eqs. (6.1, 6.8), that to
proceed further one needs the explicit constitutive expressions for the entropy , the heat
input vector Q , and the generalized 2nd order Piola-Kirchhoff stress tensor T m , S m , and
Γ.
7. Linear Constitutive Equations
To derive the linear constitutive equations for micromorphic electromagnetic continuum,
first, let the Helmholtz’s free energy density, eq.(5.27), be expanded as a polynomial up
to second order in terms of its arguments
o
o o o o oT TKLo KL S KL
KL oKLM KLM PKo EK* M Ko BK
2
3
12 o T 2 / T o a1KLT KL aKL
T KL aKLM
T KLM aK4 TEK* aK5 TBK
1
4
5
1
1
12 AKLMN
KL MN AKLMN
KL MN AKLMNP
KL MNP BKLM
KL EM* CKLM
KL BM
2
6
2
2
12 AKLMN
KL MN AKLMNP
KL MNP BKLM
KL EM* CKLM
KL BM
3
3
3
12 AKLMNPQ
KLM NPQ BKLMN
KLM EN* CKLMN
KLM BN
1
2
3
12 DKL
EK* EL* 12 DKL
BK BL DKL
EK* BL
, (7.1)
where T 0 is the reference temperature,
T 0 T , T 0 0 , T T 0 ,
1
1
AKLMN
AMNKL
(7.2)
,
2
2
2
2
AKLMN
AMNKL
ALKMN
AKLNM
(7.3)
,
(7.4)
3
3
AKLMNPQ
ANPQKLM
,
(7.5)
4
4
AKLMN
AKLNM
,
(7.6)
6
6
AKLMNP
ALKMNP
,
(7.7)
0
0
S KL
S LK
,
(7.8)
2
2
aKL
aLK
,
(7.9)
2
2
BKLM
BLKM
,
(7.10)
2
2
CKLM
CLKM
,
(7.11)
1
1
DKL
DLK
,
(7.12)
2
2
DKL
DLK
.
(7.13)
Then eqs. (5.28-5.33) leads to
2
3
0 T T 0 { a1KL KL aKL
KL aKLM
KML aK4 EK* aK5 BK } 0 ,
1
4
5
1
1
TKLm TKL0 a 1KL T AKLMN
MN AKLMN
MN AKLMNP
MNP BKLM
E M* CKLM
BM
(7.14)
,
(7.15)
m
0
2
2
4
6
2
2
S KL
S KL
a KL
T AKLMN
MN AMNKL
MN AKLMNP
MNP BKLM
E M* CKLM
BM ,
(7.16)
0
3
3
5
6
3
3
KLM KLM
a KLM
T AKLMNPQ
NPQ ANPKLM
NP ANPKLM
NP BKLMN
E N* C KLMN
BN ,
(7.17)
1
2
3
1
3
PK PK0 a K4 T BLMK
LM BLMK
LM BLMNK
LMN DKL
E L* DKL
BL ,
(7.18)
1
2
3
2
3
M K* M K0 aK5 T CLMK
LM CLMK
LM CLMNK
LMN DKL
BL DLK
EL* ,
(7.19)
where 0 , { T 0 , S 0 , Γ 0 } , P 0 , M 0 are the initial entropy, stresses, polarization,
magnetization, respectively; a 1 , a 2 , a 3 are the thermal stresses moduli; a 4 , a 5 are the
pyroelectric and pyromagnetic moduli; is the heat capacity; Ai (i=1,2,…6) are the
generalized elastic moduli; B1 , B 2 , B 3 are the generalized piezoelectric moduli;
C 1 , C 2 , C 3 are the generalized piezomagnetic moduli; D 1 is the dielectric susceptibility;
D 2 is the magnetic susceptibility; D 3 is the magnetic polarizability.
Now, in view of the Clausius-Duhem inequality (5.34), the linear constitutive equations
for the heat input and the current can be obtained as
1
3
QK H KL
,L H KL
E L*
(7.20)
,
(7.21)
2
4
J K* H KL
E L* H KL
,L
,
where H 1 is the heat conductivity, H 2 is the electric conductivity, H 3 indicates the
Peltier effect, H 4 indicates the Seebeck effect. If Onsager postulate is followed, then
there exists a dissipation function (
, E * ) which is nonnegative with an absolute
minimum at E * 0 and yields
QK
( / )
,
(7.22)
E K*
,
(7.23)
J K*
This implies
1
1
,
H KL
H LK
2
2
,
H KL
H LK
3
4
H KL
H LK
GKL ,
(7.24)
(7.25)
and
H
H1
G
G
H2
(7.26)
is positive definite. All the above-mentioned material moduli may be functions of the
Lagrangian coordinate X and the reference temperature T o .
On the other hand, from eqs.(5.23-5.25), it is seen that in general Q and J * are functions
of the three generalized Lagrangian strains, temperature, temperature gradient, electric
field, magnetic flux, and the Lagrangian coordinate. For isotropic material in a simpler
case, i.e., neglecting the effect of the third order strain tensor γ , the current and the heat
input can be rewritten as
where
Q = Q(ε, β, θ, E * , B, S, X) ,
(7.27)
J * = J * (ε, β, θ, E* ,B, S, X) ,
(7.28)
KL 12 ( KL LK KL ) LK
S K 12 eKLM [ LM ]
,
(7.29)
.
(7.30)
It should be remarked that (1) KL will be reduced to u( K , L ) - the classical macro-strain
tensor in the case of small deformation, and (2) B and S are axial vectors and
transformed as
B = RB det( R) ,
S = RS det( R)
,
(7.31)
while the absolute vectors E * and are transformed as
R ,
X
E * = RE * ,
(7.32)
where
X = RX .
(7.33)
Now, according to Wang’s representation theorem for isotropic functions (Wang
[1970,1971]), it follows
Q = c1 E * + c2 + c3εE * + c4 ε + c5ε 2 E * + c6 ε 2
+ c7 βE * + c8 β + c9 β 2 E * + c10 β 2 + c11B × E * + c12 B ×
+ c13 S × E * + c14 S × + c15 (εβ - βε)E * + c16 (εβ βε)
c17 [( B B ) E * ( B E * ) B ] c18[( B B ) ( B ) B ]
c19 [( S S ) E * ( S E * ) S ] c20 [( S S ) ( S ) S ]
c21[(B E * )S (S E * )B ] c22 [(B θ)S (S )B ]
+ c23[ε(E * B) (εE * ) B ] + c24 [ε( B) (εθ) B ]
+ c25 [ε(E * S) (εE * ) S ] + c26 [ε( S) (εθ) S ]
+ c27 [ β(E * B) (βE * ) B ] + c28[ β( B) (β ) B ]
+ c29 [ β(E * S) (βE * ) S ] + c30 [ β( S) (β ) S ]
,
(7.34)
J * = d1 E * + d 2 + d3εE * + d 4 ε + d5ε 2 E * + d 6 ε 2
+ d 7 βE * + d8 β + d9 β 2 E * + d10 β 2 + d11B × E * + d12 B ×
+ d13 S × E * + d14 S × + d15 (εβ βε)E * + d16 (εβ βε)
d17 [( B B ) E * ( B E * ) B ] d18[( B B ) ( B ) B ]
d19 [( S S ) E * ( S E * ) S ] d 20 [( S S ) ( S ) S ]
d 21[(B E * )S (S E * )B ] d 22 [(B θ)S (S )B ]
,
(7.35)
+ d 23[ε(E * B) (εE * ) B ] + d 24 [ε( B) (εθ) B ]
+ d 25 [ε(E * S) (εE * ) S ] + d 26 [ε( S) (εθ) S ]
+ d 27 [ β(E * B) (βE * ) B ] + d 28 [ β( B) (β ) B ]
+ d 29 [ β(E * S) (βE * ) S ] + d30 [ β( S) (β ) S ]
where ci and d i ( i 1, 2, ,30 ) are functions of , X , and the invariants made from
two 2nd order symmetric tensors ε and β , two absolute vectors E * and , two axial
vectors B and S . The constitutive functions, ci and di , are subjected to the ClausiusDuhem inequality (5.34) .
From eqs.(7.34, 7.35), the Peltier effect–electric field producing heat flow- and the
Seebeck effect–temperature gradient producing current- are clearly seen and, also, the
second order vectorial effects are noticed: (1) c3 , c5 , c7 , and c9 indicate that strains
produce an anisotropic Peltier effect, (2) c12 shows that heat flows perpendicular to
B and , which is the Righi-Leduc effect, (3) c11 shows that heat flows perpendicular
to B and E * , which is the Ettingshausen effect, (4) d4 , d6 , d8 , and d10 indicates that
strains produce an anisotropic Seebeck effect, (5) d11 gives the Hall effect – current flows
perpendicular to B and E * , and (6) d12 gives the Nernst effect – current flows
perpendicular to B and . Further more, it is seen that the axial vector S , which is
equivalent to the anti-symmetric strain tensor representing the difference between the
macro-motion and the micro-motion, has a similar effect as the magnetic flux vector B .
It is interesting to see that if micromorphic theory is reduced to classical continuum
theory, then eqs.(7.34, 7.35) become
Q = c1 E * + c2 + c3 εE * + c4 ε + c5 ε 2 E * + c6 ε 2
+ c11 B × E * + c12 B ×
c17 [( B B ) E * ( B E * ) B ] c18 [( B B ) ( B ) B ] ,
+ c23 [ε(E B) (εE ) B ] + c24 [ε( B) (εθ) B ]
*
*
(7.36)
J * = d1 E * + d 2 + d3 εE * + d 4 ε + d5 ε 2 E * + d 6 ε 2
+ d11 B × E * + d12 B ×
d17 [( B B) E * ( B E * ) B ] d18 [( B B ) ( B ) B]
.
(7.37)
+ d 23 [ε(E * B) (εE * ) B ] + d 24 [ε( B) (εθ) B ]
The difference between eq.(7.34) and eq.(7.36) and between eq.(7.35) and eq.(7.37) are
the effects due to the micro-structure and the micro-motion.
Acknowledgment
The support to this work by National Science Foundation under Award Number CMS0115868 is gratefully acknowledged.
Reference
Chen Y., Lee J.D. and Eskandarian A., Atomic counterpart of micromorphic theory, Acta
Mechanica, 2002.
De Groot, S. R. and Suttorp, L. G., Foundations of Electrodynamics, North-Hollard,
Amsterdam, 1972.
Dixon, R. C. and Eringen, A. C., A dynamical theory of polar elastic dielectric – I & II,
Int. J. Engng. Sci., 3, 359-398, 1965.
Eringen, A. C. and Suhubi, E. S. (1964). Nonlinear theory of simple micro-elastic solids –
I., Int. J. Engng. Sci. 2, 189-203.
Eringen, A. C., Microcontinuum Field Theories I: Foundations and Solids, SpringerVerlag, New York, 1999.
Eringen, A. C. and Maugin, G. A., Electrodynamics of Continua I: Foundations and Solid
Media, Springer-Verlag, New York, 1990.
Jackson, J. D., Classical Electrodynamics, John Wiley & Sons, New York, 1975.
Kiral, E. and Eringen, A. C., Constitutive Equations of Nonlinear Electromagnetic-Elastic
Crystals, Springer-Verlag, New York, 1990.
Wang, C. C., A new representation theorem for isotropic functions, Part I and Part II,
Arch. Rat. Mech. Analysis, 36, 166-223, 1970.
Wang, C. C., Corrigendum to ‘representationf for isotropic functions’, Arch. Rat. Mech.
Analysis, 43, 392-395, 1971.