Mathematical treatment of atmospheric gravity waves
advertisement

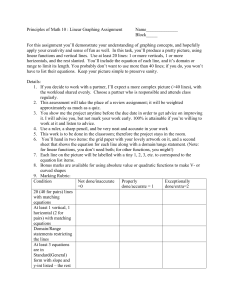
Mathematical treatment of atmospheric gravity waves Introduction This topic is an enormous one and a student who seriously wants to get to know the literature must read a number of text books. The best one to start with is probably ‘Atmospheric Gravity Waves’ by Carmen J. Nappo (Academic Press) which presents an overview of the subject without too much detail. The most authoritative on internal waves in fluids is probably Lighthill’s classic ‘Waves in Fluids’ which helps place atmospheric gravity waves in the wider context of fluid mechanics. However, most text books on atmospheric dynamics contain some introduction to gravity waves. The treatment here is very simple and assumes that the student is familiar with the fundamental equations of atmospheric dynamics as applied to the atmosphere. Nomenclature As usual with mathematical physics the problem facing the student has as much to do with understanding the symbols used for different variables as it has with understanding the maths itself. This short document is no exception. So, here is a brief summary of my symbol conventions: du u u u u Full differential: D Du u v w dt t x y z du Du ut uu x vu y wu z Partial differential: subscript dt Fundamental equations of adiabatic, inviscid atmospheric dynamics. These can be found in any dynamics text book but are written down slightly differently in each of them: 1 Momentum equation: 1-3 DV p f k V gk D .V Continuity equation 4 Adiabatic equation Dθ = 0 5 Equation of state p = ρrT 6 where V is the 3-D velocity vector, p is pressure, f the Coriolis parameter, g the acceleration due to gravity, k a unit vertical vector, ρ is density, T is temperature and θ potential temperature. Gravity wave solutions Equations 1-6 can describe all possible motions in the atmosphere, from sound waves and turbulence at the very small scales to the general circulation at the largest. In seeking wave solutions to a dynamical system the standard method in theoretical physics is to define a basic, slowly-varying or constant state for the system and linearise the equations about that state – i.e: a) define each quantity q q q ' where the overbar denotes the background (or mean) state and the prime denotes departures from this state b) expand equations 1-6 and omit all terms with a product of prime terms c) solve the resulting set of linear equations by postulating wave-like solutions. Fourier analysis allows any arbitrary disturbance to be expressed as a linear superposition of these waves. Note that the monochromatic wave solutions derived here and in all the text books do not correspond to actual atmospheric disturbances, which must necessarily consist of a superposition of these elementary components (monochromatic waves exist at all points in space and time; real gravity waves obviously do not). The gravity-wave solutions we find depend on the basic state we choose to expand around – one reason different text books give different expressions for gravity waves. Furthermore, this method, applied to the fundamental equations, describe more than just gravity waves – they describe sound 1 waves and a few other types as well. We will therefore make approximations to our equations to remove some of these undesirable solutions. Simplest case: stationary, hydrostatic, non-rotating horizontally uniform basic state. Stationary means u , v and w are all zero, so DV in equations 1-3 simply becomes the vector (ut , vt , wt ) . Non-rotating means we drop the Coriolis terms and hydrostatic means p z g . Horizontally uniform means p, and are functions only of z. We also make two further assumptions: that the flow is incompressible (.V = 0) and '/ = -'/ . The latter assumption removes the sound wave solutions from our equations: compressibility of air is a phenomenon associated with sound and the assumption that density fluctuations are caused by temperature rather than pressure suppresses the physics of sound waves. (Formally, this, and the neglect of in the momentum equations except when combined with g, is known as the Boussinesq approximation). Armed with all these assumptions we can write the five fundamental equations as follows: 1 ut + px = 0 …………………….. 1a 1 vt + py = 0 …………………….. 2a 1 wt + pz - 2 pz = 0 ; on substituting the hydrostatic equation and '/ = -'/ we get: 1 wt + pz - g = 0 …………………..3a ux + vy + wz = 0 ……………………….4a t + wz = 0 …………………………..5a We have a system of five linear equations in five unknowns. In fact, we have chosen such a simple basic state that there is no need to retain both horizontal directions: we can choose x to lie in whichever direction we like. Setting v and py to zero reduces the set to four equations. Since these are homogeneous (no constants or forcing functions) we seek harmonic solutions: (u, w, p, ) = (U, W, P, ) exp i(kx + mz - t) where the capitalised variables are the amplitudes of the corresponding primed variable, and k and m are the horizontal and vertical wavenumbers (components of the wave vector). Thus: 0 U 0 k/ 0 -i im/ -g/ W = 0 k m 0 0 P 0 0 -i z Setting the determinant of the matrix to zero gives us the dispersion relation: Nk = 2 (k m2 )½ g z ; N is the Brunt-Vaisala frequency. The amplitudes U, W, P and are related by the so-called polarisation relations: where N 2 = 2 U = -(m/k)W; P = -(m /k2)W; = (i z /)W For a wave travelling towards the east, k and are both positive. m can be either positive or negative, depending on whether the energy is propagating up or down. This in turn follows the group velocity cg = k. We can find this by differentiating the dispersion equation: Nm 2 Nmk cg = , = , 2 3 3 2 2 2 k m (k m ) (k m 2 ) 2 For k,m>0, the group propagation is eastward and downward, so negative m corresponds to upward energy propagation. Note that the wave vector k = (k,m) is perpendicular to the group velocity (k.cg=0), confirming that the group propagation is along the phase lines. Vertical distance (arbitrary units) In the case of an upward-propagating wave (i.e. energy propagation upwards), m<0 and the phase fronts move downwards. (Group and phase propagation are in opposite directions – exactly opposite to most waves we encounter, e.g. surface water waves). Then U and W are in phase – the phase fronts tilt upwards and to the east. Pressure is in phase with U and W while leads by 90. The plot below shows a gravity wave pattern of this kind, with variation plotted as a function of x for fixed values of z, and all at the same time. 5.0 u, w and p 2.5 0 -2.5 variation corresponding to bold dashed line -5.0 0 2 4 6 8 10 Horizontal distance (arbitrary units) positive – hence leads u and v in the diagram above. Individual air parcels execute slantwise motion as shown opposite, where the line depicts the path of the parcel. Maximum u and w are then at the centre of the line. As the motion is adiabatic, is conserved for the parcels – but a horizontal section through the wave encounters air that has been brought up and down in turn. Where the air is at a minimum in altitude, will be a maximum on the horizontal section since must increase with height for the wave to exist. At this point u and w are zero, turning from negative to 3 Effect of uniform background wind Consider an atmosphere with a uniform background wind U . This means that: Dq = qt + U qx = i(- + U k)q = -iq for any variable q. Making this substitution into equations 1-5, it is clear that the only change is to replace by = - k U , - then the dispersion and polarisation relations retain exactly the same form. We now have two wave frequencies: , which is called the apparent frequency – the frequency measured by an observer on the ground (i.e. in a frame of reference fixed w.r.t the ground). , called the intrinsic frequency (or Doppler-shifted intrinsic frequency) – the frequency experienced by the air parcels themselves. For a mountain wave, for instance, the wave pattern is fixed to the mountain so = 0 - but the air parcels oscillate up and down with frequency k U . Introducing the background wind breaks the symmetry between the horizontal directions, and we might now want to consider the y-direction. For a wave propagating in a uniform background wind field U = ( U , V ), we now have = - U k – V ℓ where ℓ is the wave vector in the y direction. The dispersion relation is then: N 2 (k 2 2 ) 2 = 2 2 (k m2 ) Relaxing the incompressibility criterion Returning to equations 1-3, we now need to develop different forms of 4 and 6. 4 is the continuity equation Dρ = -ρ.V. This can also be written: t = -.(V) = (u ') x (w ') z ………………………….4b assuming that there is no mean wind. The equation of state is: p = rT…………………………………6 Taking the time derivative of this and dividing through by the equation itself we get: pt T = t + t p T 1000 Since = T p Substituting for T: t r cp , pt r (1 ) - t p cp t T r pt = t T cp p = pt - t p where γ = cp/cv. Substituting for p from eqn.6 and noting that the speed of sound cs2 rT , t = pt cs2 - t …………………………..6a 4 We can substitute directly from 5a into 6a to eliminate θ, giving a set of equations equivalent to 1a to 5a: ut + px = 0 …………………….. 1b vt + py = 0 …………………….. 2b wt + pz - g = 0 …………………..3b t = ux (w) z …………………..4b t = pt cs2 - w N2 …………………… 6b g This set of equations can be solved using a similar method to set a, i.e. qt = -iωq; qx = ikq. For the z direction it turns out that a different approach is needed: we solve for w as one variable, and use the substitutions: p’ = P exp(η + im)z expi(kx-ωt) and w = Q exp(η + im)z expi(kx-ωt) 1 N2 g 1 1 2 = = The quantity = - , where H is the local density scale 2 g cs 2 z 2H height. Since decreases with scale height H and w with scale height 2H we can deduce immediately that: z w exp exp imz exp i( kx - t ) 2 H - in other words the amplitude of w’ increases exponentially with height, with roughly twice the atmospheric scale height. This is of great importance in the stratosphere, and especially the mesosphere where gravity waves propagating up from the troposphere assume large amplitudes and dominate the circulation. Equations 1b – 6b result in a quartic dispersion equation, which results in two solutions for ω2, one corresponding to gravity waves and one to acoustic waves (which are now included in our solutions because the air is compressible). The gravity wave dispersion equation is now: Nk = 2 (k m2 2 )½ which in practice is not much different to the original version. The polarisation equations become complex under this assumption but again in practice the differences from the simple case are small. Effect of vertical structure in the atmosphere – the Taylor-Goldstein equation In practice, the atmosphere is neither stationary nor flowing with a uniform background velocity. We therefore introduce a vertically-varying background velocity U ( z ) into equations 1-5. Retaining the Boussinesq and incompressibility approximations and including only the x horizontal direction: (ut Uux wU z ) px 0 …………………….. 1c (wt Uwx ) pz - g 0 …………………..3c ux + wz = 0 ……………………….4c t U x w z 0 …………………………..5c 5 As before, these equations are solved by postulating harmonic solutions, but this time the z variation will not be assumed. Thus: (u, w, p, ) = (u(z), w(z), p(z), θ(z)) exp i(kx - t) qt = -iωq and qx = ikq but qz remains to be solved. As before Uk . From 4c, u = iwz/k, so equation 1c becomes: w z + wU z + ikp = 0 ……………………….1c’ k From 5c, iw z / , so equation 3 becomes: iw p z + i N2 w 0 ………………………3c’ These two equations are now solved for w. This involves differentiating the first equation with respect to z to eliminate the pz term. Note that Ω varies with height. It is the apparent frequency ω that is assumed to be constant, so dΩ/dz = -k U z . We also assume that z / H , with H as before the density scale height. This results in the following equation: wz k 2N 2 kU zz kU z k2 w = 0 2 H H A further substitution is made to convert this to a standard form: z w wˆ exp 2 H whence: k2N 2 kU z 1 2 kU zz ˆ zz + ˆ =0 w k w 2 2 H 4 H w zz - This is the Taylor-Goldstein equation. We can see that if there is no background wind shear the term in brackets is constant, and equal to m2, where m is the vertical wavenumber. From this the dispersion relation derived earlier follows immediately. The Taylor-Goldstein equation is written in various ways in different text books – for instance we can use the substitution (c U )k , where c is the horizontal phase speed ω/k, to convert to the form: N2 U kU z 1 ˆ zz + ˆ =0 w k 2 zz w 2 (c U ) c U H (c U ) 4 H 2 Propagating wave solutions are possible if the bracketed term is positive and slowly-varying with height. If the term is negative evanescent solutions are obtained – waves cannot propagate. This leads to the phenomenon of wave reflection or trapping. Analytical methods such as the WKB approximation, or direct numerical solution, are used in practice to solve this equation for a specified profile of N and U. 6 Mountain Waves For mountain waves c=0 since the waves are fixed to the topography. Both in papers and in text books (e.g. Holton) the T-G equation is further approximated by assuming that the vertical wavelength << H*, allowing the wave equation to be written: w zz + with 2 2 k 2 w = 0, = N2 U 2 or w xx +w zz + 2 w=0 U zz , the Scorer Parameter U Inertia-gravity waves Finally, we return to the basic equations and examine the consequences of including the Coriolis term in the momentum equation. In practice, this term is effective on time scales of ~ 1 day, so its effect on short-period waves is small. Again we use the Boussinesq and incompressibility approximations. We must retain the three momentum equations in this case because the two horizontal ones are coupled: (ut - fv) px 0 …………………….. 1d (vt + fu) py 0 …………………….. 2d g 0 …………………..3d ux + vy wz = 0 ……………………….4d wt pz - t w z 0 …………………………..5d The simplest approach is to seek solutions (u, v, w, p ', ) = (U, V, W, P, ) exp i(kx + ℓy + mz - t) Following the same method as in (a), the dispersion equation is found to be: 2 f 2 m2 N 2 (k 2 (k 2 2 2 ) m ) 2 with polarisation equations: ikf (k 2 2 ) 2 f 2 N2 V U ; W U ; P U ; i W k i f i f k g (m i N 2 2 g )(k i f ) These rather forbidding equations hide a pleasing elegance to the gravity-wave solutions which become more evident if x is taken to be the direction of propagation of the wave. Then ℓ=0 and V = -iUf/ω. V and U are in quadrature, causing the wind vector to rotate elliptically – clockwise for upward energy propagation and anticlockwise for downward. For oscillations near to the inertial frequency (which are common in the lower stratosphere) the ellipses are nearly circles, as shown in the example below measured by a VHF radar at Aberystwyth, Wales. 7 8