Moduli of path families on hyperelliptic algebraic curves
advertisement

Moduli of path families on hyperelliptic algebraic curves
Mika Seppälä
University of Helsinki and Florida State University
1. Introduction
The concept of moduli of path families as defined by Ahlfors and Beurling in (Ahlfors
and Beurling 1952) extends to homotopy classes of simple closed curves on Riemann
surfaces as follows. Let X be a compact Riemann surface, and α a simple closed curve
on X. Let Γ(α) denote the set of simple closed curves on X homotopic to the given
curve α. Let M (α) denote the set of all metrics ρ│dw│ on X such that
∫β ρ│dw│≥ 1
for all rectifiable curves β in Γ(α). Define the modulus, m(α), of the path family Γ(α)
by setting
m(α) = inf ∫∫X ρ2 du dv,
where the infimum is taken over all metrics ρ│dw│ in M (α).
Let
(1.1)
C {( x, y) | y 2 ( x 1 )
( x 2 g 2 )}
be a hyperelliptic affine algebraic plane curve. Here we assume that the branch points
j are all distinct. Every hyperelliptic curve of genus g can always be represented in this
form, and this standard representation for any hyperelliptic curve can always be found
algorithmically. The algcurves package of Maple has built in routines for testing
whether a given curve is hyperelliptic and if it is, then the above standard presentation
can always be found automatically.
In this paper we define an algorithm that will compute the modulus of a given homotopy
class of simple closed curves on the curve C defined by the equation (1.1). The key tool
in this algorithm is the Myrberg algorithm for finding a Schottky uniformization of a
hyperelliptic curve. The algorithm was developed by P. J. Myrberg (1926). For details
of this see (Myrberg 1920) or for a modern exposition, with detailed proofs and
extension to Fuchsian uniformizations, see (Seppälä 1995), (Seppälä 1995), and (Seppälä
2003).
2. Myrberg’s uniformization
For the convenience of the reader we recall here briefly Myrberg’s algorithm (see
(Myrberg 1920), (Seppälä 2003). To find a Schottky group uniformizing a hyperelliptic
curve C given by equation (1.1) one forms 2 g 2 sequences jk , j 1,..., 2 g 2, so that
0j j , and each jk 1 has been obtained from jk by the inverse of a rational mapping of
the complex plane onto itself. This is the mapping (5) of Lemma 1 in (Seppälä 2003).
For the purposes of this paper it is not necessary to go into the details of how the
sequences jk have been formed. By standard analytical considerations one shows that
these sequences converge. In fact they do converge rather rapidly.
For j 1,..., 2 g 2 let
(2.1)
j lim jk ,
k
and, for i 1,..., g , let
ej
(2.2)
(2j 1 2j ) z 22j 12j
2 z (2j 1 2j )
, j 1,..., g 1,
be the elliptic rotation of angle with fixed-points 2j 1 and 2j . If all the branch points
j are real, then also the limits points j are real. In this case the mappings e j map the
upper half plane onto the lower half plane.
Let
(2.3)
G e1e2 ,..., e1eg 1
be the group generated by the products of the elliptic rotations e1 and e j , j 1,..., g 1 .
The group G is a Schottky group acting in a domain so that C / G.
3. Lifting of path families on algebraic curves
Consider a hyperelliptic curve C given by the affine equation (1.1). The following
arguments apply to any simple closed path in the finite complex plane going around
exactly two points j , i.e., the bounded complement of the curve contains exactly two
points j , and the path does not go through any point j . For the sake of clarity, let
us assume that goes around 2 and 3 . Then lifts to a simple closed path on the
hyperelliptic curve C going around a handle of C .
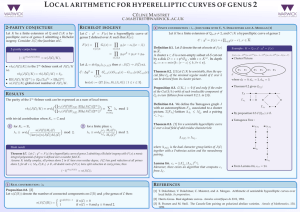
Figure (3.1). This figure illustrates the hyperelliptic algebraic curve
C together with the points j on the finite complex plane. The
genus of the curve is two, hence there are six points j in the plane.
These points are indicated as dots on the plane. The path is
indicated by the dotted line in the plane (below). The dotted line
above is a lifting of the path .
Myrberg uniformization consists of the following:
1. A group G of Möbius transformations generated by certain products of elliptic
Möbius rotations. This group acts discontinuously in a domain so that
C / G . The domain is the complement of the limit set of the group G .
2. An onto mapping : C , this mapping is the uniformizing projection.
To understand the geometry of the group G better, let us, for the moment, assume that
the branch points j are real and ordered so that 1 2 3 ... 6 . We do this
assumption to simplify considerations. The results hold in the general case.
The corresponding points j are then also real and ordered in the same way as the
original branch points j . Then the group
Ahlfors, L. V. and A. Beurling (1952). Conformal Invariants. Construction and
application of conformal maps. Proceedings of a symposium., Washington DC,
U.S. Government Printing Office.
Myrberg, P. J. (1920). "Über die Numerische Ausführung der Uniformisierung." Acta
Soc. Sci. Fenn. XLVIII(7): 1-53.
Seppälä, K. D. S. a. M. (1995). Numerical uniformization of hyperelliptic curves. ISSAC
1995.
Seppälä, M. (2003). "Myrberg's Numerical Uniformization of Hyperelliptic Curves."
Ann. Acad. Sci. Fenn.
Seppälä, P. B. a. M. (1995). Computing on Riemann surfaces. Topology and Teichmüller
spaces, Katinkulta, Sotkamo, Finland, World Sci. Publishing.