Systems of Difference Equations—Host

Created by Claudia Neuhauser
Worksheet 6: Systems of Difference Equations
Systems of Difference Equations —Host-parasitoid Models
About 14% of all insect species are estimated to belong to a group of insects called parasitoids . These are insects (mostly in the order Hymenoptera) that lay their eggs on, in, or near the (in most cases, immature) body of another arthropod, which serves as a host for the developing parasitoids. The eggs develop into free-living adults while consuming the host.
Parasitoids play an important role in biological control. A successful example is
Trichogramma wasps that parasitize insect eggs. These wasps are reared in factories for field releases. Every year, millions of hectares of agricultural land are treated with released Trichogramma wasps; for instance, to protect sugar cane from the sugar cane borer, Chilo spp., in China, or to protect corn fields from the European corn borer,
Ostrinia nubilalis Hübner, in Western Europe. Another successful example of biological control of an insect pest is the parasitoid wasp Aphytis melinus that regulates the red scale
( Aonidiella aurantii ), which damages citrus trees in California.
The importance of parasitoids in pest control stimulated both empirical and theoretical work. Theoretical studies of host-parasitoid interactions go back to Thompson
(1924) and Nicholson and Bailey (1935). The work of Nicholson and Bailey was particularly influential. They introduced discrete generation, host-parasitoid models of the form
(1)
N t
1
P t
1
bN cN t t
1 exp(
aP t exp(
) aP t
)
for t=
0,1,2,…. Here,
N and P denote the population sizes of susceptible hosts and searching adult female parasitoids at time t and t+ 1, respectively. The parameter b is interpreted as the net growth parameter. We see from the first equation that hosts grow exponentially in the absence of parasitoids ( P= 0). The term exp(
aP t
) is the fraction of hosts that are not parasitized (and thus 1
exp(
aP t
) is the fraction of hosts that are parasitized) at generation t . Parasitized hosts produce parasitoids. The parameter c is equal to the average number of female parasitoids produced per parasitized host. All parameters are nonnegative.
The Nicholson-Bailey model assumes that hosts and parasitoids encounter each other randomly. This means that the total number of encounters is proportional to the product of host and parasitoid densities. That is,
N e
#encounters per unit time between hosts and parasitoids
aHP
Therefore, the average number of encounters per host is given by
N e
aP
H
- 1 -
Worksheet 6: Systems of Difference Equations
The probability that a host escapes parasitism is equal to the probability that a host encounters 0 parasitoids, which is the zero term of the Poisson distribution. A random variable X is Poisson distributed with parameter λ if
m
(
m )
e
m !
It holds that ( )
var( )
. The histograms for different values of the parameter λ are shown below:
Poisson Distribution
= 1 Poisson Distribution
= 2
0.4
0.4
0.2
0.2
0
0 5 10 15
Poisson Distribution
= 3
20
0.4
0.2
0
0 5 10 15
Poisson Distribution
= 5
20
0.2
0.1
0
0 5 10 15
Poisson Distribution
= 4
0.2
20
0.1
0
0 5 10 15
Poisson Distribution
= 6
0.2
20
0.1
0
0 5 10 15 20
0
0 5 10 15 20
Figure 1: Poisson distribution.
The Matlab code for seeing the histogram of this distribution is x = 0:15; lambda=1; for lambda=1:6 y = poisspdf(x,lambda); subplot(3,2,lambda), bar(x,y); title([ 'Poisson Distribution \lambda=
' ,num2str(lambda)]) xlim([0 20]) end
With
aP , we find
- 2 -
Worksheet 6: Systems of Difference Equations
P (host escapes parasitism)
e
aP
Equations of the form (1) are systems of difference equations. They are suitable for populations that reproduce in discrete time. We will proceed similarly as in the case of a single difference equation: we will find point equilibria and explain how to analyze their stability, first by investigating linear systems and then nonlinear systems. It turns out that linear systems can be solved exactly and thus the behavior of equilibria can be determined from the solution directly. To analyze point equilibria of nonlinear systems, we will linearize about the point equilibrium and thus reduce the analysis to the linear case.
Equilibria and Stability in Systems of Linear Difference Equations
A system of two linear difference equations is of the form
(2) x
1
( t x
2
( t
1 )
1 )
a
11 x
1
( t ) a
21 x
1
( t )
a
12 a
22 x
2 x
2
( t )
( t ) where t=
0,1,2,…. This can be written in matrix form
x x
1
(
( t t
x ( t
1
1
)
)
1 )
a a
11
21 a
12
a
A
x x
1 x
2
(
( t
( t t
)
)
)
It shows that systems of linear difference equations are linear maps. (Recall that the
A point equilibrium * satisfies the equation
x
* A x *
It follows that the zero vector
0
is a point equilibrium of Equation (2). This also means that the zero vector is a solution of (2). To determine the stability of
0
, we proceed as follows. Recall that if the eigenvalues of A are distinct, the corresponding eigenvectors are distinct, and we can write any vector uniquely as a linear combination of the two denote the pairs of eigenvalues and eigenvectors of A by initial vector
x ( 0 )
1
, u
1
and
2
,
u
2
. Then any
can be written as a linear combination of the two eigenvectors
x ( 0 )
c
1 u
1
c
2
u
2
- 3 -
Worksheet 6: Systems of Difference Equations where c
1
and c
2
are real numbers. Using this representation of
x ( 0 ) , we found previously that
x ( t )
c
1
t
1 u
1
c
2
t
2 u
2
, t
0 , 1 , 2 ,...
which immediately yields insights into the long-term behavior of
Namely, if both
1
1 and
2
1 , then lim t
x ( t )
x ( t ) , t lim
x ( t )
0
0
, regardless of
x ( 0 )
.
. We say in this case that
0
0
is a stable equilibrium . If either
1
1 or
2
1 , then the equilibrium
0
0
is unstable . The stability condition holds more generally, not just for real and distinct eigenvalues. (Note that if
, then
a
2 b
2
.)
0
0
The point is a stable equilibrium of
x ( t
1 )
A x ( t ) if both eigenvalues
1
and
2
satisfy
1
1 and
then the equilibrium
0
0
is an unstable equilibrium.
2
1 . If either
1
1 or
2
1 ,
Task 1:
Determine the stability of the equilibrium
0
0
of the system
x
1 x
2
( t
( t
1 )
1 )
0 .
4
0 .
3
0 .
2
0 .
1
x
1 x
2
(
( t t )
)
Are there any other equilibria? Find a geometric argument that explains your answer.
If one of the eigenvalues is equal to 1, then there are infinitely many equilibria, as illustrated in the following example.
Example: Suppose
- 4 -
Worksheet 6: Systems of Difference Equations
A
2
1.5
3 2.5
The eigenvalues of A are given by det( A
I ) ( 2
)(2.5
2.5
2
4.5
2
0.5
0.5
(
1)(
0.5)
0
Hence, the two eigenvalues are
and
1
1
2
0.5
To find equilibria of ( 1) , we solve
3
2
1.5
2.5
x
1
If we multiply this out, we find x
1
2 x
1
1.5
3 x
1
2.5
x
2
x
1 x
2
x
2
3 x
1
1.5
x
3 x
1
1.5
x
2
2
0
0
The second set of equations consists of two identical equations, namely, after simplifying, x
1
0.5
x
2
0 . This means that any point x x
1 2
) that satisfies x
1
0.5
x
2
0 , is a point equilibrium. These equilibria are neutrally stable . This means that they are neither repellent nor attracting. After a small perturbation, the system will reach a different equilibrium point on the line given by x
1
0.5
x
2
0 .
Equilibria and Stability of Nonlinear Systems of Difference Equations
The general form of a system of two nonlinear difference equations is
(3) x
1
( t x
2
( t
1 )
1 )
F
G
x
1 x
1
( t
( t
),
), x
2 x
2
( t
( t
)
)
- 5 -
Worksheet 6: Systems of Difference Equations where F and G are (nonlinear) functions. We say that
x
1
*
, x
*
2
is a point equilibrium if the following two equalities hold simultaneously: x
*
1 x
*
2
F
G
x
*
1 x
*
1
,
, x
*
2 x
*
2
Task 2:
Find all equilibria of x
1
( t x
2
( t
1 )
1 )
2 x
1 x
1
( t
( t
)
)
1
1
x x
1
2
( t
( t
)
)
Task 3:
Find all biologically relevant equilibria of the Nicholson-Bailey model
N t
1
P t
1
bN cN t t
1 exp(
aP t exp(
) aP t
)
To determine the stability of point equilibria, we proceed as in the case of a single difference equation, namely, we linearize about the equilibrium
x
1
*
, x
2
*
. We start with x
1
( t x
2
( t
1 )
1 )
F
G
x
1 x
1
( t
( t
),
), x
2 x
2
( t
( t
)
)
and assume that
x
1
*
, x
*
2
is a point equilibrium, that is,
G x
1
*
, x x
*
1
F x
1
*
, x and
To linearize about
x
*
1
, x
*
2
, we write x
*
2 x
1
( t )
x
*
1
z
1
( t ) and x
2
( t )
x
*
2
z
2
( t ) where we interpret the z i
( t )
F
x
1
( t ), x
2
( t )
and G
x
1
( t ),
, i= 1 or 2, as small perturbations. We now linearize x
2
( t )
about the equilibrium
x
1
*
, x
*
2
. We find
- 6 -
Worksheet 6: Systems of Difference Equations linearization of F
x
1
( t ), x
2
( t )
is F
x
*
1
, x
*
2
F
x
1
* z
1
( t )
F
x
2
* z
2
( t ) linearization of G
x
1
( t ), x
2
( t )
is G
x
1
*
, x
*
2
G
x
1
* z
1
( t )
G
x
2
* z
2
( t )
where x
1
*
, x
2
*
*
means that we evaluate the expression in the parentheses at the equilibrium
.
With x
1
( t )
x
1
* z
1
( t ) and x
2
( t )
x
*
2
z
2
( t ) , we find that approximately x
*
1
z
1
( t
1 )
x
*
1
, x
*
x
1
*
F
x
1
* z
1
( t )
F
x
2
* z
2
( t ) x
*
2
z
2
( t
1 )
G
x
*
1
, x
*
x
*
2
G
x
1
* z
1
( t )
G
x
2
* z
2
( t )
Canceling x
*
1
from the first equation and x
*
2
from the second equation, and writing the resulting approximation in matrix form, we obtain
(4)
z
1 z
2
( t
( t
1 )
1 )
x
1
F
G x
1
*
*
F
x
2
G
x
2
*
*
z
1 z
2
(
( t t )
)
The 2
2 matrix is called the Jacobian matrix of the vector-valued function evaluated at the equilibrium x
1
*
, x
2
*
F
G
(
( x
1 x
1
,
, x x
2
2
. It plays a crucial role in determining stability. The
)
)
right-hand side of Equation (4) is a linear map and we can thus use the results from linear systems of difference equations to draw conclusions about the stability of the equilibrium. We summarize the results in the following box.
- 7 -
Worksheet 6: Systems of Difference Equations
The point equilibrium eigenvalues
1
and
x
1
*
, x
*
2
of the nonlinear system (3) is locally stable if the two
2
of the Jacobian matrix evaluated at
x
1
*
, x
*
2
,
x
1
F
G x
1
*
*
F
x
2
G
x
2
*
*
satisfy
1
1 and
2
1
If
1
1 or
2
1 , the point equilibrium
x
1
*
, x
*
2
is unstable .
Task 4:
Discuss the stability of the equilibria of the system in Task 2.
To calculate the Jacobian for the Nicholson Bailey model, we can use Matlab:
>> syms a b c x y
>> f = [b*x*exp(-a*y);c*x*(1-exp(-a*y))];
>> v=[x,y];
>> R = jacobian(f,v);
If you check R , you’ll see the entries of the Jacobian
R
be
c (1
e ay
ay
)
bxae
ay cxae
ay
The following Matlab code calculates eigenvalues for different values of the parameter b :
- 8 -
Worksheet 6: Systems of Difference Equations
%Nicholson-Bailey Stability Analysis syms x y a=0.023;c=2;k=1; for b=0.5:0.1:1.5
A=solve( 'b*x*exp(-a*y)=x' , 'c*x*(1-exp(-a*y))=y' ,x,y);
star(1,k)=A.x(2,1);
star(2,k)=A.y(2,1);
nstar(:,k)=eval(star(:,k));
f = [b*x*exp(-a*y);c*x*(1-exp(-a*y))];
v=[x,y];
R = jacobian(f,v);
E=eig(R);
lambdahelp=subs(E,x,nstar(1,k));
lambda(:,k)=subs(lambdahelp,y,nstar(2,k));
k=k+1; end abslambda=abs(lambda);
Matlab Code for Simulating the Nicholson Bailey Model
%Nicholson Bailey Model NBsim.m
a=0.023; b=1.5; c=2; endtime=101; time=0:1:endtime-1;
X0row=[25,10]; %row vector for initial condition
X0=X0row'; %making a column vector out of the initial condition
Npop=zeros(2,endtime); %initializing the population vector
Npop(1,1)=X0(1);
Npop(2,1)=X0(2); for i=1:endtime-1
Npop(1,i+1)=b*Npop(1,i)*exp(-a*Npop(2,i));
Npop(2,i+1)=c*Npop(1,i)*(1-exp(-a*Npop(2,i))); end plot(time,Npop(1,:), '.' ,time,Npop(2,:), '*' );ylabel( 'Population
Size' );xlabel( 'Generation' ); legend( 'Host' , 'Parasitoid' );
- 9 -
Worksheet 6: Systems of Difference Equations
Computer Lab (In Class on ____________; Hand in on ________________)
Preparation for the lab:
Read the worksheet and complete the tasks.
Read the steps for the computer lab and think about implementation before class.
Read: Kaitala et al. (1999). Dynamic Complexity in Host-Parsitoid Interactions.
Step 1
Download the spreadsheet for the Nicholson-Bailey model. The parameters in the model are a= 0.023, b= 1.5, and c= 2, with initial values N
0
= 25 and P
0
= 10.
Your worksheet (Tab: “Steps 1 and 2”) looks like
1
A B C
Nicholson-Bailey Model
D E
2
3
4
5
6
7 a
0.023 b
1.5 c
2
N_0
25
P_0
10
Time N_t P_t
8
9
10
0 25 10
1 29.79501 10.27332
2 35.28718 12.54045
11 3 39.66838 17.68318
Where the entries in Row 4 and Row 8 are values.
Cell B9 is ‘=$B$4*B8*EXP(-$A$4*C8)’
Cell C9 is ‘=$C$4*B8*(1-EXP(-$A$4*C8))’
(a) Plot the temporal dynamics for t=
0,1,2,…,50 for the above set of parameters. Plot both host and parasitoid densities as functions of time in one plot.
(b) Looking at the dynamics, what are your predictions about densities in future generations?
(c) The simulations indicate that at times the densities become very small. How could you modify the simulations to deal with extremely low densities so that this becomes biologically more realistic?
(d) Repeat the simulations you did in (a) but now choose b= 0.5 and plot the temporal dynamics for t=
0,1,2,…,50. Plot both host and parasitoid densities as functions of time in one plot. Describe the difference between the dynamics in (a) and in (d).
Step 2
Assume that the parasitoid is absent in Equation (1). What are the dynamics for the host then? Analyze the behavior of the host dynamics in the absence of the parasitoid. In
- 10 -
Worksheet 6: Systems of Difference Equations particular, determine if there is a critical value b c
such that the behavior below b c
is qualitatively different from the behavior above b c
. If there is such a critical value, determine its numerical value and show a graph of the host dynamics as a function of time for each qualitatively different case.
Homework (Due on __________________)
Step 3
Suppose
A
2
1.5
3 2.5
Open the EXCEL spreadsheet (Tab: “Step 3”) to investigate the dynamics of the system of difference equations given by ( 1) . Recall from the worksheet that the eigenvalues of A are 1 and -0.5 and that all point equilibria are on the line given by x
1
0.5
x
2
0 . These point equilibria are neutrally stable.
(a) Run the dynamics for the first 40 time steps for the following three initial conditions:
(i) x x
2
(0))
(0.1, 0.2) , (ii) x x
2
(0))
, and (iii) x x
2
(0))
(5, 2) . In your write-up, include the values at time 1 and time 40. (You do not have to include graphs.)
(b) Calculate the ratios x t
2
( ) / x t
1
( ) for the three runs in (a). What happens for t large?
List the ratios at time 40 in your homework and explain your result in light of the statement that “all point equilibria are on the line given by x
1
0.5
x
2
0
.” (You do not have to include graphs.)
Step 4
(a) Over the past several weeks, you have gained significant experience with mathematical modeling in the context of population models. Population models have the advantage of allowing us to introduce the mathematics without having to deal with complex biology. We will soon leave the topic of population models and discuss other biological systems, continuing to broaden our toolbox and learning about other systems.
Write a short essay on which areas of biology you have encountered (or hope to encounter) mathematical models in.
(b) Reflecting over the past several weeks and looking back at mathematics courses you have taken in the past, write a short essay on what works best for you when you learn mathematics. Address both in-class learning styles and how you learn at home.
- 11 -
Worksheet 6: Systems of Difference Equations
Step 5 (In Class)
You saw above that the Nicholson-Bailey model is unstable for certain parameter values.
A model that shows stable dynamics is given by the negative binomial model . The equations are of the form
N t
1
P t
1
bN t
cN t
1
aP t k
k aP t k
k
The parameter k is positive and measures aggregation of parasitoid attacks. The model is locally stable when k <1. For very small values of k , the approach is monotonic, whereas larger values of k result in oscillations.
Use MATLAB to code up the negative binomial model for the parameters a= 0.023, b= 1.5, and c= 2 with initial values N
0
= 25 and P
0
= 10. Investigate the temporal dynamics for t=
0,1,2,…,100 for k between 0.1 and 1.3 by varying
k in increments of 0.4. What do you observe? Include graphs for each value of k . Include your MATLAB code in your homework.
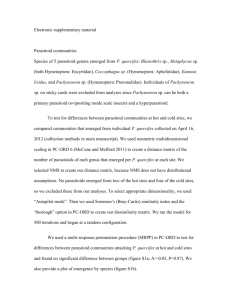
Figure 2: The parasitoid Cyzenis albicans (tachnid fly) parasitizes the winter moth, Operophtera brumata , by laying eggs on the leaves of the winter moth’s food plant. The black bars are the observed values, the hatched are fitted from a negative binomial distribution with parameter k =0.28, and the hollow bars are from a Poisson distribution. The figure is from Hassell (2000), page 18 1 .
1 Hassell, M.P. 2000. The Spatial and Temporal Dynamics of Host-Parasitoid Interactions. Oxford
University Press.
- 12 -