Population Estimation Using Mark
advertisement

Population Estimation Using Mark-Recapture methods
You now have experience estimating the size (or density) of a population of sessile
“organisms” (dots) using several methods. One of the questions that arose in our discussions of
sampling methodology is what if the organisms move around? In many situations it is necessary
to estimate population size or density of motile organisms. For example to set up a sound fishery
program, the fishery biologist must have an idea of the size of the stock. You can think of many
similar situations where knowing something about how many motile organisms are “out there” is
important. How can this be done?
In some special cases the presence of motile individuals can be inferred from stationary
features. For example birds fly but nests stay put, moles move but the burrows (and the visible
entrances) are more or less stationary. Even more ephemeral things like scats, scent marks and so
on can be used to give an idea of the density of organisms that move. However in many cases
there is no substitute for getting data on the motile organisms directly. Sometimes we can count
them as they move by a point like migratory bird “censuses” but there is always the problem of
counting the same individual more than once and not counting others at all. So how can you
estimate population size of motile organisms, especially in cases where the animals (because
usually we don’t have these kinds of problems with plants) are generally not visible?
A number of methods based on marking a sample from the population then letting the
marked individuals mingle with the population, then sampling again have been developed. This
group of methods is generally termed mark-recapture methods, though sometimes the
“recaptures” are only sightings e.g. of banded birds. Each method has strengths and weaknesses
and some are more suitable for particular situations than others so in a real situation, a researcher
has to know a good deal about the study species before choosing the appropriate method. Good
discussions of these methods can be found in Begon (1979), Krebs (1989) and Seber (1973).
The Petersen Method:
This is the simplest and most basic method. While it is rarely used in ecology it is the
theoretical basis for many of the other methods, so a good understanding of its operation is
important to working with the more complex methods. The Petersen estimate is often used in lab
situations where students sample beans in a jar etc. you may have already done this in a class you
took.
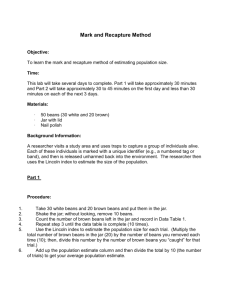
Basically the students are presented with a jar of beans (or something) and asked to
determine the number of beans in the jar (this total number is denoted by N). Barring the
possibility of dealing with the entire population (e.g. a census, weighing the jar, getting the
volume of all the beans etc.) some sort of sampling method will be necessary. To do this a
student takes a sample of M beans (let “M” remind you of “marked”). These beans are marked
(with a dot or paint or something similar) then returned to the jar and the jar of beans is
thoroughly mixed (the marked individuals are allowed to spread themselves through the entire
population). Then another sample of C beans is taken (let “C” remind you of “captured”) and the
numbered of beans in this second sample that have the marks on them R are counted (let “R”
remind you of “recaptured”).
If several important assumptions are met (can you list them?) a ratio can be made
M/N = R/C
Where
^
N
M
C
R
is the estimated population size (an estimate of N)
is the number of animals captured (and marked) at the first sampling time
is the number of animals caught at the second sampling time
is the number (of those C animals) that had a mark
Can you see why this is true (given the assumptions are met)?
Then
^
N
= (C*M)/R
And you have your estimate of the population size.
There are a number of ways this simple Petersen estimate can be fine tuned but to understand the
basics underlying it this is enough.
As mentioned for the estimate to be accurate there are several assumptions that must be met
these include:
1) The marked individuals must, after they are returned, become randomly mixed with
the rest of the population so that when the second sampling occurs all individuals in
the population (marked and unmarked) have an equal chance of being in the second
sample
2) There are no births, deaths, immigration into or emigration out of the population. That
is there is one and only one value for N. For this to be true in real populations, the
interval between the sampling periods is generally held to be fairly short.
3) The fact that an individual is marked has no effect. That is its survival, behavior etc
are in every way the same as for the unmarked individuals.
4) The two samples are taken randomly
5) The sampling itself must not take much time (relative to the interval between
samples)
6) The fact that an animal was once captured does not change the chances of its being
captured again. Many animals become trap-shy (and some become trap-happy –
especially if the bait is favored)
^
By now you should be wary of numbers like N
that are supposed to represent the ‘real”
^
population size. How good an estimate is N
? One way to evaluate this question is to
determine its variance. If C and M are approximately equal (that is if the two samples are
about the same size) then
^
VarN
= {M2*C*(C-R)}/R3
You have already had some experience with variances so you know what they mean.
There are other ways of showing how good the estimate is. One very useful one is to use
confidence limits. Confidence limits are derived from the variance, but they are more intuitively
useful. Confidence limits allow you to say that the calculated limits (the value + (plus or minus
the limits) have a set probability of containing the true value. In this case it would mean that you
would be (say) 95% confident that the true value of N fell between the upper and lower bounds.
You can set these at higher levels (say 99% or 99.9% or lower 90). Which of these do you think
would have the biggest spread between the upper and lower bounds and which one would have
^
the narrowest confidence band?). The confidence limits for N
requires two steps
1) Read the Poisson confidence limits for the value R obtained from the table that is attached.
2) Calculate the confidence interval for N using these two limits:
N= {(M+1)*(C+1)/ (upper or lower limit of R)}-1
That is you will do this calculation two times once with the higher value (for the upper
confidence limit) and once for the lower value (for the lower confidence limit.
There are many other mark-recapture techniques that have been devised to give different
sorts of information about the population of interest. Each one has its own strengths and
weaknesses, and some make more assumptions than the simple Petersen estimate.
One of these is the “triple catch” estimate which gives an estimate of population size, but
also birth and death rates. This method requires three sampling events and also needs relatively
good recapture rates to be successful.. It assumes that there are no immigration or emigration
events (which could get confused with birth and death rates) and assumes birth and death rates
are constant (at least during the study period.
Here’s how it works:
1) A first sample is taken counted (n1), marked (r1)and released.
2) A second sample is taken and counted (n2), the number of marked recaptures noted
(m21), a new different mark applied to the sampled animals which are then released
(r2).
3) A third sample is taken the number captured are counted (n3), and the number of first
time (m31 and m32) and second time recaptures i.e. they have both day 1 and day 2
marks (m32) counted.
We can allow birth and survival rates to vary from day to day - then on day 2 there are M21
marks at risk and so if the marked proportion is the same in the sample as in the population then
M21/N2 = m21/n2
^
So that N
2 = M21*n2/m21
That is the estimated population size on the second capture day is the number of first marks (i.e.
at risk) times the ratio of the second sample size
Also since the M21 individuals are the survivors of the r1 individuals released the first day:
M21 = r11
Where:
^
1 = M21/r1
So we want an estimate of M21
^
M
21 = (m31*r2/m32)+m21
And if b2 individuals are added to the population between days 2 and 3 than
b^ 2 = 1-[(m31*n2)/(n3*n21)]
so the bias-adjusted population estimate is
^
M
21 ={(m31*(r2+1)/(m32+1)}+m21
^
^
N
2 = (n2+1)* M21/ (m21+1)
^
^
1 = M21/r1
and
b^ 2= 1-{(m31+1)*n2/(n3+1)*m21}
Here are some useful references for mark-recapture methods
Andrewartha, H. G. 1961 Introduction to the study of Animal Populations
Begon, M 1979, Investigating Animal Abundance
Krebs, C. J. 1989. Ecological Methodology
Poole, R. W. 1974. Quantitative Ecology
Seber, G. A. F. 1973 The Estimation of Animal Abundance and Related parameters
Southwood, T. R. E. 1966, Ecological Methods
A site with the background of the triple catch methodology can be found at:
http://books.google.com/books?id=SnDaYgJfJWgC&pg=PT59&lpg=PT59&dq=%22triple+catc
h%22+%2B+population&source=web&ots=b7xR1Jafvj&sig=wCWLvhKdi3qBGqXWTl_C9UHNt8&hl=en&sa=X&oi=book_result&resnum=2&ct=result - PPT58,M1