Dynamic Moral Hazard with Persistent States Suehyun Kwon March 9, 2015
advertisement

Dynamic Moral Hazard with Persistent States
Suehyun Kwon∗
March 9, 2015
Abstract
This paper studies a principal-agent problem in a partially persistent environment. The costly unobservable action of the agent produces a good outcome
with some probability corresponding to the state. The state is unobservable and
follows an irreducible Markov chain. There exist second-best contracts resembling a tenure system: The agent is paid nothing during a probationary period
after which the principal implements the first-best action every period. A probationary period is necessary in the second best, and the second-best contract
becomes stationary after tenure. The paper provides a recursive formulation
for complete characterization of the second best. (JEL: C73, D82)
1
Introduction
There is a large literature on repeated moral hazard with i.i.d. states or fully persistent states.1 But some environments are better described by partially persistent
∗
Kwon: University College London, suehyun.kwon@ucl.ac.uk, Department of Economics, University College London, Gower Street, London, WC1E 6BT United Kingdom. I’m very grateful
to Glenn Ellison, Juuso Toikka and Muhamet Yildiz for time, advice and encouragement. This
paper has benefited from suggestions of V. Bhaskar, Gabriel Carroll, Martin Cripps, Robert Gibbons, Bengt Holmström, Johannes Hörner, Jean Tirole, Alexander Wolitzky, seminar participants
at Kyung Hee University, London Business School, Pennsylvania State University, Princeton University, Seoul National University, University College London, University of Essex, University of
Illinois at Urbana-Champaign, IFORS 2014 and lunch seminar participants at MIT. I thank Samsung Scholarship for financial support.
1
Dutta and Radner (1994), Fudenberg, Holmström and Milgrom (1990), Holmström and Milgrom
(1987), Malcomson and Spinnewyn (1988), Radner (1981, 1985), Rogerson (1985), Rubinstein and
Yaari (1983)
1
states. Productivity of an economic sector varies from year to year, but high productivity is more likely to come after a productive year than after an unproductive year.
Fundamentals or profitability of a firm can change over time. Technological advances
are also often clustered. Consider a firm whose fundamentals are unknown to the
investors and the manager. If the outcome reflects both the fundamentals and the
manager’s effort, then the investors and the manager learn about the fundamentals
from the observed outcome. The investors’ inference on the fundamentals depends
on their belief about the manager’s effort; the manager’s effort has both an informational value and the outcome consequence. An optimal contract should address this
potential information asymmetry in addition to moral hazard.
In this paper, I examine a model of dynamic moral hazard with partially persistent states; I note that persistent states create an informational rent for the agent
and explore properties of the second-best contracts. I find that there exist secondbest contracts resembling a tenure contract and they become stationary after tenure.
Specifically, I consider a principal hiring an agent over an infinite horizon. In each
period, the agent can work or shirk. The costly unobservable action, “work”, produces a good outcome with some probability, and the probability of a good outcome
depends on the state. The state is unobservable to both the principal and the agent,
and it follows an irreducible Markov chain with positive persistence. The principal
observes the outcome and pays the agent. The principal can commit to a long-term
contract. Both parties are risk-neutral, and the agent is subject to limited liability.
I start in Section 3 with an analysis of one and two-period versions of the model.
The two-period model illustrates one of the basic insights: Deviations by the agent
create an information asymmetry, and the agent receives an informational rent if
the principal wants him to work in both periods. When the state is persistent, the
outcome has an informational value in addition to its payoff consequence. If the
principal believes that the agent worked this period, the principal updates his belief
about the state accordingly. The agent’s deviation leads to an unproductive outcome
and an incorrect updating of the principal’s belief. Since the bad outcome lowers
the prior of being in the good state, the principal assigns a strictly lower probability
to the good state than the agent does in the period after the agent deviates. The
agent can ensure himself a strictly positive amount of rent by a one-stage deviation.
I characterize this informational rent as a function of the discount factor and the
persistence of the state. I also give conditions under which the principal wants the
2
agent to work in both periods.
Section 4 characterizes the second-best contracts of the infinite horizon model
which are the main results of the paper. There exist second-best contracts with
features of a tenure system. During a probationary period, the agent is paid nothing,
but once the agent is tenured, the principal implements the first-best action every
period, and the contract becomes stationary. The probationary period before tenure
is necessary in the second best.
The first property of the second-best contract is the tenure contract; once the
agent is paid, the principal implements the first-best action every period. If the principal backloads the payment, the agent’s continuation value becomes higher, and the
principal can offer a continuation contract with a higher expected surplus. However,
one needs to be careful with replacing continuation contracts when the state is persistent. The composition of payments in the continuation contract matters for the ICs
in earlier periods, and the principal can’t replace the continuation contract without
affecting the IC constraints even if the new contract provides the same continuation
value. In my model, the principal and the agent learn that they are in the good state
when they observe a good outcome, and the common knowledge of the state at the
time of payment allows the principal to replace the continuation contract. The principal doesn’t benefit from backloading the payment only if he is already implementing
the first-best action every period, and therefore, once the agent is paid, he is tenured.
If the principal wants the agent to work every period in the first best, the secondbest contract becomes stationary after tenure. The principal’s information changes
over time, but if the principal uses his information, the agent can deviate and create
an information asymmetry; the principal is better off by committing not to use his
information. I also show that the principal wants to take his outside option in the
second best, even if the first-best is to induce working every period; the second-best
contracts must involve probationary periods. When the principal takes an outside
option in some periods, he can lower the levels of the agent’s continuation values.
In addition to the level effect, taking the outside option in a persistent environment
provides a new channel of lowering the rent. The priors of the principal and the agent
after a deviation converge to the ergodic distribution of the state transition when the
principal takes his outside option. The agent’s informational advantage is reduced,
and the incentive power of the contract is lowered as a result.
I provide further characterizations of the second-best contracts in Section 5. I
3
provide a recursive formulation to complete the characterization with the length of
probationary periods. Because of a potential information asymmetry, the standard
recursive methods can’t be applied to my model; my recursive formulation takes the
joint limit of pairs of sets and makes use of the monotone convergence theorem rather
than the contraction mapping theorem. I characterize the second-best contract when
the efficiency assumption is relaxed, and I also discuss contracts with reports.
There are a few independent works in which the outcome carries information
about both the agent’s effort and the underlying state; they are Bhaskar (2012),
DeMarzo and Sannikov (2014), He, Wei and Yu (2014) and Jovanovic and Prat (2014).
The common finding, also in my model, is that the informational rent reduces the
agent’s incentives to exert effort, and there are different ways to reduce the agent’s
informational rent. In DeMarzo and Sannikov, the agent receives no payment for a
while and after the initial payment, there is a permanent distortion in the termination
policy.2 While the backloading is common in their paper and mine, there are two
differences after the initial payment. The first difference is that there is a permanent
distortion after the payout in their paper, but all the distortion happens before the
initial payment in my model; the principal implements the first-best actions after
tenure. Since the only inefficiency is through the termination policy in their model,
the principal may terminate the contract inefficiently, which can happen after the
initial payment. Meanwhile, in my model, the principal can take per-period outside
options and can delay the payments until he can implement the first-best action every
period. The second difference is that the principal doesn’t use all of his information
after the agent is tenured in my model; in their paper, the contract reaches a steady
state after the initial payment, but the payment is linear in the principal’s belief
about the state, using all of his information.3
He, Wei and Yu show that the informational rent, incentives and effort all decrease
under the deterministic contract.4 The contracts in my model are history-dependent,
but incentives also decrease over time in my model; once the agent is tenured, the
agent is essentially incentivized by per-period payments. However, the agent works
2
Since the agent in my model doesn’t benefit from his private information when the contract is
terminated, my model should be compared to the general setting in DeMarzo and Sannikov. The
outside option is exogenous in my model.
3
However, on the equilibrium path, the principal’s prior is from a finite set in my model, while
the principal’s belief about the mean of the normal distribution is a continuum in their model.
4
They define deterministic contracts as non-history-dependent contracts.
4
every period after tenure in my model, and the effort doesn’t decrease over time. They
also show that the optimal, history-dependent, contract provides higher incentives
after good performance; in my model, the agent’s continuation value increases after a
good outcome in a probationary period, and the agent receives a rent in every period
after a good outcome after tenure.
The state in Jovanovic and Prat is fully persistent, and because the information
accumulates over time, they find it optimal to recommend zero effort until the precision reaches a threshold after which the principal implements the highest effort at
every instant. There is no limited liability, and together with the exponential utility of the agent, they show that the payments are front-loaded. All three of the
aforementioned papers are in continuous time where the output flow is the sum of
the state, the agent’s action and a Brownian motion. The additive-normal outcome
structure implies that the agent’s action has the uniform effect in all states. The
agent’s action shifts the mean of the normal distribution. It is sufficient to consider
the informational rent in addition to the state and the continuation value. On the
contrary, different actions lead to different outcome distributions in my model, and
the composition of payments in the continuation contract matters. Bhaskar (2012) is
a discrete-time model with fully persistent states. He considers contracts with shortterm commitment power over a finite horizon that implements the high effort every
period. The minimum cost increases with the length of the horizon and the agent’s
discount factor.
The probationary period of the second-best contract in my model shares similarities with Chassang (2010). Fong (2009), Fong and Li (2010) and He (2009) also
find that the optimal contract has a probationary phase. In the first two papers,
the principal cannot commit to a long-term contract and the environment is i.i.d. or
has private types, whereas in my model, the principal can commit to a long-term
contract, and the state is partially persistent. In He (2009), cash flow is a geometric
Brownian motion and is observable. Zhu (2013) shows that shirking can occur on the
equilibrium path when there is no persistent information. Backloading of incentives
is also related to Thomas and Worrall (1994, 2010), where the states are i.i.d. or
observable, and the contracts must be self-enforcing. The stationarity of the continuation contract after tenure is related to the literature on sticky wages. In Townsend
(1982), long-term contracts and inefficient tie-ins can be optimal under private information. The stationary payments of the second best of my model shows that the
5
stationarity of a long-term contract is not necessarily because of enforcement costs.
Fernandes and Phelan (2000) and Zhang (2009) provide recursive formulations with
persistent private information. It has also been noted in other papers that the power
of incentives decreases over time. Garrett and Pavan (2014) define the power of incentives as the ratio of the marginal disutility of effort and the marginal utility of
consumption at the equilibrium level and consider conditions on the state persistence
and the agent’s risk aversion under which it decreases or increases over time. Farhi
and Werning (2013) show the mean reversion of labor wedge.
My paper is related to literature in dynamic financial contracts. The recursive
methods for dynamic contracts were pioneered by Green (1987) and Spear and Srivastava (1987).5 More recently, there are continuous-time models including Biais,
Mariotti, Rochet and Villeneuve (2010), DeMarzo, Fishman, He and Wang (2010),
DeMarzo and Sannikov (2006) and Sannikov (2008). In these papers, the principal and the agent share the same beliefs about the distribution of future outcomes,
whereas in my model, the agent’s deviation leads to an information asymmetry.
In Sannikov (2014), the agent’s action affects the output in the entire future, and
Strulovici (2011) considers renegotiation. Garrett and Pavan (2012) study optimal
contracts when the match quality between a firm and each manager changes over time
and is private information of the manager. They find that distortions in retention
decisions never disappear even in the long run, which contrasts with the second-best
contract of my model. In Kwon (2014), I consider relational contracts with persistent,
observable states.
There is also literature on dynamic adverse selection with persistent private information. With partially persistent types, the optimal contract is often historycontingent, but the principal achieves efficiency in the limit. Papers with Markovian types include Battaglini (2005), Athey and Bagwell (2008) and Williams (2011).
Battaglini (2005) considers consumers with Markovian types, and Athey and Bagwell (2008) study collusion with persistent private shocks. Tchistyi (2013) considers
security design when cash flow is correlated over time. Escobar and Toikka (2013)
show the folk theorem result with Markovian types and communication. Cole and
Kocherlakota (2001) consider agents with private income shocks and savings. Pavan,
Segal and Toikka (2014) study dynamic mechanism design with private information
arriving over time.
5
See also Clementi and Hopenhayn (2006), Phelan and Townsend (1991).
6
Lastly, my paper is also related to papers on experimentation and innovation.
Bergemann and Hege (1998, 2005) and Hörner and Samuelson (2013) study experimentation when the quality of the project is fixed. Manso (2011) considers a model
of two-armed bandit problem with one known arm. There is both adverse selection
and moral hazard in Halac, Kartik and Liu (2013). If the unknown state is fully
persistent, experimentation is a stopping problem, whereas in my model, the state
changes over time, and the principal is never certain about the state at the beginning
of a period.
The rest of the paper is organized as follows. Section 2 describes the model, and
one and two-period examples are discussed in Section 3. Section 4 characterizes the
second-best contract of the infinite horizon model, and Section 5 presents further
characterizations of the second best. Section 6 concludes.
2
Model
The principal hires the agent over an infinite horizon, t = 1, 2, · · · . The common
discount factor is δ < 1, and the principal and the agent can commit to a long-term
contract.
The contract specifies whether the principal takes his outside option in any given
period. Each period when the principal doesn’t take his outside option, the agent
can work or shirk. There are two outcomes, and the principal values a good outcome
at 1 and a bad outcome at 0. Shirking costs the agent nothing, but it produces a
bad outcome with probability 1. Work costs the agent c > 0, and it produces a good
outcome with some probability. The probability of a good outcome depends on the
state. The agent’s action is unobservable to the principal; the principal only observes
the outcome.
There are two states, the good state (state 1) and the bad state (state 2). Throughout the paper, the subscript 1 refers to the good state, and the subscript 2 refers to the
bad state. The state is unobservable to both parties. The state follows an irreducible
Markov chain with positive persistence; the cdf after the good state dominates the
cdf after the bad state in the sense of first-order stochastic dominance. Specifically,
let M be the Markov transition matrix for the state transition with entries
Mij = Pr(st+1 = j | st = i), i, j, st ∈ {1, 2},
7
1
p
1
1
p
M11
1
M12
t+1
t
1−p
M21
1−p
0
0
0
M22
0
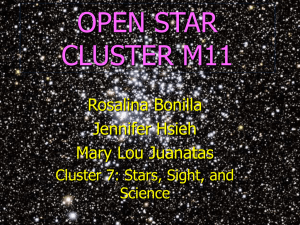
Figure 1: i.i.d. (on the left) vs. Persistent States. (on the right)
where st is the state in period t.6
Assumption 1 (FOSD). The Markov matrix M for the state transition satisfies
M11 > M21 , 0 < Mij < 1, ∀i, j.
M11 > M21 implies that the cdf after state 1 dominates the cdf after state 2. It
captures the positive persistence of the state. When the state has positive persistence,
the probability of being in the good state is strictly higher after being in the good
state than after being in the bad state. Note also that I’m assuming that there is
always a positive probability of transition from state i to state j, for all i, j = 1, 2,
which implies that the Markov chain is irreducible.
Work produces a good outcome in the good state and a bad outcome in the bad
state. Figure 1 shows the difference between i.i.d. states and the persistent states
of my model. When the states are i.i.d., the probability of a good outcome if the
agent works is constant across periods. In the figure, the probability is denoted by
p, and the probability of a bad outcome is 1 − p. On the contrary, when the state
is persistent, the probability of a good outcome depends on the state in the previous
period. In this sense, my model is the most immediate generalization of i.i.d. states
to persistent states.
The principal can take an outside option in any period, but in the first best,
the principal wants the agent to work every period. I define the first best to be an
optimal contract when the agent’s effort is verifiable but the state is not observable
to both parties. The second best is an optimal contract when the agent knows his
6
I assume that the state transition is exogenous. Whether the agent works or not doesn’t affect
the state transition.
8
action but the principal only observes outcomes. Let π t be the principal’s prior on
the state at the beginning of period t; π t := (π1t , π2t ), where πit is the probability
that the state in period t will be state i. I assume that the initial prior π 1 satisfies
M21 ≤ π11 ≤ M11 .7 Let u be the payoff to the principal from his outside option. I
assume that the payoff to the agent is zero if the principal takes his outside option.8
The following assumption says that in the first best, it is efficient to have the agent
work for any given prior on the state.9 I also assume u > 0. It follows that if the
principal doesn’t want the agent to work in a given period, the principal takes his
outside option rather than letting the agent shirk.1011 Assumption 2 is relaxed in
Section 5.2.
Assumption 2 (Efficiency). The parameters M, c and u are such that in the first
best, the principal wants the agent to work given prior (M21 , M22 ), and u > 0.
Both the principal and the agent are risk-neutral, and the agent is subject to
limited liability. There are three constraints to consider, the IR, the IC and limited
liability. The IR means that in period 1, the agent receives at least the payoff from
his outside option in expectation by participating in the contract. Limited liability
requires that the agent receives non-negative payments. I normalize the outside option
7
It follows that for all t ≥ 1, we have M21 ≤ π1t ≤ M11 .
Qualitatively, the second-best contract remains the same if the outside option for the agent is
strictly positive. I’m assuming full-commitment, which implies that the IR is relevant only in period
1. A positive outside option could change the continuation values in period 1, but the properties of
the second-best contract don’t change.
9
In the first best, the principal observes the agent’s action, and the continuation value can be
written as a function of prior. Since the principal can always mimic the strategy with prior π 0 , the
continuation value increases with π1 , the prior on the good state. Therefore, the first-best action is
a step function and increases with π1 . Given π1t ≥ M21 and Assumption 2, the first-best action is
to induce working for every prior.
10
When u = 0, we can characterize the optimal contract in the same way. The principal is
indifferent between taking his outside option and letting the agent shirk, but we can assume that
the principal takes his outside option when he doesn’t want the agent to work, and the rest of the
contract can be constructed similarly.
11
We can also characterize the optimal contract in the environment where the principal induces
the agent to work, shirk or the principal terminates the contract, i.e., there is no per-period outside
option. When the principal wants the agent to shirk, the agent can deviate and work. However, if
the agent produces a good outcome, the deviation is caught with probability 1, and the principal can
punish the agent. If the agent deviates but gets a bad outcome, the agent is more pessimistic than
the principal, but the agent’s deviation payoff is bounded from above by the on-the-equilibriumpath payoff. The proof follows from Lemmas 1 and 2 for the relaxed problem, and the agent never
deviates when he is supposed to shirk. This environment corresponds to having a per-period outside
option with zero payoffs to both the principal and the agent.
8
9
of the agent to zero, and the IR is implied by the IC and limited liability.12 The IC
has to be satisfied at every node at which the principal wants the agent to work. I
assume that if indifferent between working and shirking, the agent chooses to work.
Throughout the paper, ht refers to the outcome in period t. When the principal
takes the outside option, I denote it by ht = ∅. The history ht is the sequence of
outcomes up to period t, and I denote it by ht = (h1 , · · · , ht ). (ht , hk ) refers to the
history that ht is followed by hk ; hi in hk becomes ht+i in (ht , hk ).
In the first best, if the principal observes the actions of the agent, the principal
can pay the cost if and only if the agent works. However, the principal only observes
the outcomes. A contract specifies the principal’s decisions to take his outside option
and history-contingent payments w(ht ) for all histories ht . Since the principal and
the agent are risk-neutral, the principal can delay the payments, and there is more
than one contract that implements the same payoffs; the second-best contract is not
unique. I also define termination as the principal taking his outside option forever.
3
One and Two-Period Examples
This section describes the one and two-period examples of the model. The main
observation these models bring out is that an informational rent arises when the
principal wants the agent to work in both periods. The informational rent doesn’t
exist in the one-period example. The rent is proportional to the discount factor
and the persistence of the state, which is captured by M11 − M21 . When the discount
factor is low, it can be optimal to have the agent work in every period, and an optimal
contract is independent of the history.
3.1
One Period
In this section, I consider the case when the principal hires the agent for one period
and show that the principal can leave no rent to the agent.
Let π = (π1 , π2 ) be the common prior; π1 is the probability of the good state.
Since the principal only observes the outcome, and not the action of the agent, he
offers payments w(0) and w(1) as functions of the outcome. The agent’s IC constraint
12
As mentioned already, a positive outside option for the agent can change the continuation values
in period 1, but the IR is relevant only in period 1, and the second-best contract remains the same
qualitatively.
10
is given by
w(1)
−c + π
≥ w(0).
w(0)
The agent is subject to limited liability, and the optimal contract for the principal is
to provide
c
w(0) = 0, w(1) = .
π1
The agent receives zero rent in the one-period model.
3.2
Two Periods
In this section, I consider the two-period example of the model.
Proposition 1. Suppose the principal wants the agent to work in both periods. The
rent to the agent is bounded from below by
δc(M11 − M21 )
π11
.
M21
Proof. Consider the IC constraint for the one-stage deviation in period 1. Denote by
w(h) the payment after history h. Also denote by R1 and R0 the rents to the agent
in period 2 when the agent worked in period 1 and got a good outcome or a bad
outcome, respectively. The rents are given by the following expressions:
R1 = −c + M11 w(1, 1) + M12 w(1, 0),
R0 = −c + M21 w(0, 1) + M22 w(0, 0).
The one-stage deviation of the agent is to shirk in period 1 and work again in period
2. When the agent deviates and shirks in period 1, he doesn’t update his posterior
after observing the outcome. The agent’s prior in the beginning of period 2 is π 1 M .
The IC constraint for the one-stage deviation is given by
w(1) + δR1
w(0, 1)
1
−c + π
).
≥ w(0) + δ(−c + π M
w(0) + δR0
w(0, 0)
1
On the other hand, the IC constraint for period 2 after the bad outcome is
R0 ≥ w(0, 0)
⇐⇒
w(0, 1) − w(0, 0) ≥
11
c
.
M21
Limited liability implies w(0) + δw(0, 0) ≥ 0, and the first-period IC constraint
for the one-stage deviation becomes
−c + π
1
w(1) + δR1
w(0) + δR0
≥
=
≥
=
w(0, 1)
w(0) + δ(−c + π M
)
w(0, 0)
1
1
w(0) + δw(0, 0) + δ(−c + π M
(w(0, 1) − w(0, 0)))
0
π 1 M 10
δc(−1 +
)
M21
π1
δc(M11 − M21 ) 1 .
M21
1
The IC constraint and limited liability imply a minimum rent to the agent when
the principal wants the agent to work in both periods. Note that the bound on the
rent is proportional to the discount factor and the persistence of the state. If the state
were i.i.d., i.e., M11 = M21 , the principal can have the agent work in both periods
and leave no rent.
Note also that the rent to the agent depends on the payments in the second
period after the bad outcome. The payments in the second period after the good
outcome don’t matter for the minimum rent to the agent. When the agent deviates,
the principal offers the payments in the second period as if the outcome of working
was bad in the first period; and the agent’s continuation value after the deviation is
determined by the payments in the second period after the bad outcome.
Proposition 1 shows that there exists a lower bound on the rent the principal has
to leave in order to have the agent work in both periods. In Proposition 2, I show
that the lower bound is tight, and I also show a possible form of the contract the
principal can provide.
Proposition 2. Suppose the principal wants the agent to work in both periods. The
principal can achieve the minimum rent by offering a history-independent contract in
12
period 2:
w(0) = w(0, 0) = w(1, 0) = 0,
c
w(1) = 1 ,
π1
c
w(1, 1) = w(0, 1) =
.
M21
Throughout the paper, any proof that is not provided after the proposition is in
the appendix.
The contract in Proposition 2 is one of many contracts that the principal can
provide to attain the lower bound on the rent. Since both the principal and the
agent are risk-neutral, the principal can always delay the payment and pay the agent
later. The above contract has an attractive form because of the stationarity and the
simplicity. The principal makes positive payments only for good outcomes, and in
particular, the payments in the second period are independent of the outcome in the
first period. The principal is leaving the rent to the agent because the deviation of the
agent leads to an information asymmetry between the principal and the agent, and
one way to take care of the information asymmetry is to provide identical payments
in the second period, regardless of the outcome in the first period.
Propositions 1 and 2 assume that the principal wants the agent to work in both
periods. The next proposition shows what happens when the principal takes his
outside option in some periods. Since the outside option is inefficient, the principal
incurs a loss in surplus by taking his outside option. However, depending on the
timing of the outside option, the principal can prevent the information asymmetry
from the agent’s deviation and therefore, reduce the rent to the agent.13
Proposition 3. Suppose the parameters satisfy the following inequality:
π11
< min{−c + π11 − u, δπ21 (−c + M21 − u)}.
δc(M11 − M21 )
M21
It is optimal to induce work in both periods and leave the rent to the agent. An optimal
contract is the contract given in Proposition 2. Otherwise, it is optimal to take the
outside option in one of the two periods, and the agent receives no rent.
13
If the principal mixes the continuation contracts, it has the same effect as taking the linear
combination of the IC constraints, and it convexifies the set of payoffs.
13
4
Second-Best Contracts
This section characterizes the second-best contracts of the infinite horizon model. In
the second best, the principal pays nothing until the history of the outcomes reaches
a threshold, after which the principal implements the first-best action in every period.
To induce work in every period, the continuation contract is stationary after the first
period, and the principal offers a constant payment for a good outcome. I also show
that inducing work in every period is not optimal even though it is in the first best.
Theorem 1. There exists a second-best contract that pays only for good outcomes and
has uniformly bounded continuation values. Any such contract is a tenure contract;
once the principal makes a positive payment, the principal implements the first-best
action in all remaining periods. A possible continuation contract to implement the
first-best action every period after the initial payment is to offer
w(ht , 1) =
c
, w(ht , 0) = 0
M11
in the following period and to offer every period thereafter
w(ht , hk , 1) =
c
, w(ht , hk , 0) = 0, ∀hk , k ≥ 1.
M21
Under any second-best contract, there exists a history after which the principal takes
his outside option for at least one period.
In Theorem 1, the continuation contract after the initial payment implements
the first-best action in every period. Note that the contract becomes completely
stationary after two periods since the initial payment. In particular, we will observe
that the principal makes constant payments for good outcomes on the equilibrium
path. The state is changing, and the prior of the principal also changes over time, but
it is optimal to commit not to use his information and offer a stationary contract. The
stationarity of the continuation contract also implies that the agent is incentivized by
per-period payments after tenure, and the power of incentives decreases over time.
The proof of Theorem 1 follows from Propositions 4, 5 and 6. Proposition 4
stated below establishes the optimality of tenure contracts, and it’s proved in the
next section.
Definition 1. In a tenure contract, once the principal makes a positive payment, the
14
agent is tenured, and the principal implements the first-best action in all remaining
periods. A probationary period is all the periods before the initial payment.
Under a tenure contract, the agent is guaranteed to be incentivized to work every
period after the first payment. To induce work in every period, the principal never
takes his outside option, and in particular, the principal never terminates the contract
after the initial payment.
Proposition 4. If there exists a second-best contract, then there exists a second-best
contract that pays only for good outcomes and has uniformly bounded continuation
values. Any such contract is a tenure contract; once the principal makes a positive
payment, the principal implements the first-best action in all remaining periods.
I first show that a second-best contract takes the form of a tenure system in
Section 4.1. Sections 4.2 characterizes a cost-minimizing contract to implement the
first-best action every period, and Section 4.3 shows that a probationary period is
necessary in a second-best contract.
4.1
Proof of Tenure Contracts
This section shows the optimality of tenure contracts. The proof of Proposition 4 relies
on next two lemmas and the fact that the composition of payments in the continuation
contract after a good outcome doesn’t matter for the agent’s IC constraints. I refer
to the payment for each history as the composition of payments in the continuation
contract, as opposed to the expected payoff from all payments.
Lemma 1. Given a contract that satisfies the IC and limited liability, there exists
a contract that (i) satisfies all constraints, (ii) pays only for good outcomes, (iii)
has uniformly bounded continuation values and (iv) provides the same payoffs to the
principal and the agent as in the original contract.
Lemma 2. Suppose a contract satisfies limited liability and IC constraints for onestage deviations when the agent has never deviated before. Suppose the continuation
value of the agent after any history ht is uniformly bounded. Then the contract satisfies all IC constraints and limited liability.
In Lemma 2, we need to show that there is no profitable multi-stage deviation.
Since the principal doesn’t observe the agent’s action, the continuation contract is
15
always as if the agent has never deviated; a multi-stage deviation is when the agent
shirks more than once from the work sequence induced by the contract. Suppose
there is a finite sequence of deviations that provides the agent a strictly positive gain.
In the last period of the sequence, the agent assigns a weakly higher probability to
the good state than the principal does. The IC constraint in the last period is relaxed
when the agent has a higher prior on the good state, and the agent doesn’t deviate
as long as the IC constraint for the one-stage deviation with no previous deviation
is satisfied. By backward induction, we can show that there is no profitable finite
sequence of deviations. Together with continuity at infinity, we get Lemma 2.
To see why the composition of payments in the continuation contract after a good
outcome doesn’t matter for the agent’s IC constraints, consider the IC constraint for
the one-stage deviation. Given history ht , suppose the principal takes his outside
option for T ≥ 0 periods after the bad outcome. The IC constraint is given by
0
V1
t
T +1
T +1 V1
−c + π
≥ w(h , 0) + δ (−c + πM
),
V2
V20
where π is the principal’s prior after ht , and V1 is the sum of the present compensation and the continuation value after (ht , 1). V2 , V10 , V20 are defined similarly for
(ht , 0), (ht , 0, ∅, · · · , ∅, 1), (ht , 0, ∅, · · · , ∅, 0), respectively. Since only V1 enters the IC
| {z }
| {z }
T
T
constraints, the composition of it doesn’t matter for the agent’s incentives.
Now, I can show Proposition 4.
Proof of Proposition 4. From Lemma 1, if there exists a second-best contract, then
there is a second-best contract that pays only for good outcomes and has uniformly
bounded continuation values.
Given a contract, let R be the rent and L be the loss in surplus under the contract.
L is defined to be
L = (1 − δ)(YF B − Y ),
where YF B is the expected discounted sum of the outcome subtracted by the cost in
the first best, and Y is the expected discounted sum of the outcome subtracted by
the cost under the given contract. A second-best contract minimizes R + L.
From Lemma 1, for given prior π, let Xπ be the set of (R, L) corresponding
to contracts that have uniformly bounded continuation values, pay only for good
outcomes and satisfy the IC and limited liability.
16
I allow the principal to randomize over continuation contracts, and Xπ is a convex
set. In particular, there is a one to one mapping
f : [0, Lπ ] → [0, ∞)
such that the set of feasible (R, L) is given by
Xπ ≡ {(R, L)|R ≥ f (L), 0 ≤ L ≤ Lπ }.
Lπ is the expected loss in surplus when the principal takes the outside option forever.
Lπ is bounded from above. From Assumption 2, the principal doesn’t terminate the
contract after a bad outcome in the first best; if the principal implements the first-best
action every period, the agent can guarantee a positive rent by one-stage deviations,
and we have f (0) > 0. From the fact that Xπ is convex, we know that f (·) is strictly
decreasing in L for f (L) > 0.
Since both the principal and the agent are risk-neutral, the principal can always
delay the payment. Suppose the principal makes a positive payment for ht under a
second-best contract, and ht = 1. From Lemma 2, it is sufficient to consider onestage deviations. After a good outcome, only the sum of the present compensation
and the continuation value matters for the agent’s IC constraint, and the principal
can replace the continuation contract. Instead of paying w(ht ) and continuing with
the continuation value V (ht , M1 ), the principal can offer ŵ(ht ) = 0 and
1
V̂ (ht , M1 ) = w(ht ) + V (ht , M1 ).
δ
If V (ht , M1 ) < f (0), we get
f −1 (V̂ (ht , M1 )) < f −1 (V (ht , M1 )).
R hasn’t changed, but the principal can replace the continuation contract with a
contract with a lower L, and the principal’s payoff strictly increases.
Therefore, if the principal makes a positive payment under the second-best contract, he doesn’t gain from delaying the payment; the agent’s continuation value
V (ht , M1 ) is at least as big as the minimum rent under a cost-minimizing contract
to implement the first-best action every period. The principal can choose L = 0 and
17
doesn’t lose anything in surplus under the continuation contract. The principal implements the first-best action in every period after he makes a positive payment.
The conclusion of Proposition 4 applies to an i.i.d. environment as well, but the
proof of it highlights the interaction between persistence and backloading. When the
state is persistent, the agent can create an information asymmetry between him and
the principal, and the information asymmetry is the source of an informational rent.
In general with persistent states, the principal can’t replace the continuation contracts
without affecting the earlier IC constraints, even if the new continuation contract
provides exactly the same continuation value. The composition of payments in the
continuation contract matters. However, once the principal and the agent observe
a good outcome, they know they are in the good state, and there’s no information
asymmetry between the two. Proposition 4 relies on the fact that the principal makes
payments only for good outcomes and that there is no information asymmetry after a
good outcome. Therefore, the composition of payments in the contract after a good
outcome doesn’t matter, and the principal can replace the continuation contract as
long as it provides the same continuation value. Common knowledge of the state
at the time of payment is what allows the principal to delay payments until he can
implement the first-best actions every period. The principal can always replace the
continuation contract after a good outcome with a more efficient one, and it is optimal
to backload the payments.
4.2
Stationary Contracts
This section characterizes the continuation contract after tenure. If the principal
wants the agent to work in every period in the first best, a cost-minimizing contract
to implement the first-best action in every period is stationary after the first period.
The payment for a good outcome is constant, and the payment for a bad outcome is
zero.
Proposition 5. If the principal wants the agent to work in every period, a costminimizing contract is to provide
c
, w(0) = 0,
π11
c
, w(ht , 0) = 0, ∀ht , t ≥ 1.
w(ht , 1) =
M21
w(1) =
18
Before proving Proposition 5, I will first characterize the lower bound on the rent
to the agent when the principal wants him to work every period. I define the average
rent as the discounted sum of the rent multiplied by 1 − δ. The proof of Proposition 5
follows by showing that the principal attains the lower bound with the stationary
contract.
Lemma 3. If the principal wants the agent to work every period, the average rent to
the agent is bounded from below by
π1
δ(M11 − M21 )
c(δ + (1 − δ) 1 ).
1 − δ(M11 − M21 )
M21
Proof of Lemma 3. Consider the IC constraint for the one-stage deviation after history ht . The prior on the state after a good outcome is M1 = (M11 , M12 ), and the
prior after a bad outcome believing that the agent worked in the previous period is
M2 = (M21 , M22 ). Therefore, any subgame after a good outcome is identical, and any
subgame after a bad outcome is also identical.
If the principal wants the agent to work every period, he doesn’t take his outside
option after any history ht . The IC constraint for the one-stage deviation is given by
0
V1
V
t
t+1
−c+π
≥ w(h , 0) + δ(−c + π M 10 )
V2
V2
c
⇔ V1 − V2 ≥ t+1 + δ(M11 − M21 )(V10 − V20 ),
π1
t+1
where π t+1 is the principal’s prior after ht and V1 is the sum of the present compensation and the continuation value after (ht , 1). V2 , V10 and V20 are defined similarly
for (ht , 0), (ht , 0, 1) and (ht , 0, 0), respectively.
Let V1t and V2t be the sum of the present compensation and the continuation
value after ht = (0, · · · , 0, 1) and ht = (0, · · · , 0). We have the following set of IC
| {z }
| {z }
t−1
t
constraints:
V11 − V21 ≥
V1t − V2t ≥
c
+ δ(M11 − M21 )(V12 − V22 ),
1
π1
c
+ δ(M11 − M21 )(V1t+1 − V2t+1 ), ∀t ≥ 2.
M21
Since the principal can always provide w(ht , 1) = Mc21 , w(ht , 0) = 0, ∀ht and
induce the agent to work every period, V1t − V2t is uniformly bounded for all t under
19
an optimal contract. Summing over the IC constraints, we get
1
c
, ∀t ≥ 2,
M21 1 − δ(M11 − M21 )
c
c
δ(M11 − M21 )
V11 − V21 ≥ 1 +
.
π1 M21 1 − δ(M11 − M21 )
V1t − V2t ≥
Together with
V2t = w(0, · · · , 0) + δ(−c + M21 V1t+1 + M22 V2t+1 )
| {z }
t
≥ δ(−c + M21 (V1t+1 − V2t+1 ) + V2t+1 ), ∀t ≥ 1
we have
V2t ≥ δ(
δ(M11 − M21 )
c + V2t+1 ), ∀t ≥ 1
1 − δ(M11 − M21 )
and
V21 ≥
δ
δ(M11 − M21 )
c.
1 − δ 1 − δ(M11 − M21 )
The average rent to the agent is bounded from below by
(1 − δ)(−c + π11 V11 + π21 V21 )
=(1 − δ)(−c + π11 (V11 − V21 ) + V21 )
c
δ
c
δ(M11 − M21 )
δ(M11 − M21 )
+
)+
c)
1
π1 M21 1 − δ(M11 − M21 )
1 − δ 1 − δ(M11 − M21 )
δ(M11 − M21 )
π1
=
c(δ + (1 − δ) 1 ).
1 − δ(M11 − M21 )
M21
≥(1 − δ)(−c + π11 (
From Lemma 3, we can show Proposition 5 as follows.
Proof of Proposition 5. When the principal offers a stationary contract, following any
history ht , the agent chooses to work as long as
−c + π
t+1
w(ht , 1)
≥ w(ht , 0).
t
w(h , 0)
The agent’s IC constraints become myopic because there is no gain from creating an
information asymmetry. If the principal offers a constant payment for a good outcome,
20
the payment is unaffected by the principal’s prior, and the continuation value after a
deviation is the same as the continuation value on the equilibrium path. Therefore,
in deciding whether to work or shirk, the agent only cares about the payment in the
current period, and as long as the expected payoff from working is greater than the
payment for the bad outcome, the agent chooses to work.
The contract specified in Proposition 5 provides the following constant payments:
w(ht , 1) =
c
, w(ht , 0) = 0, ∀ht , t ≥ 1.
M21
Since the agent’s prior on the state satisfies π1t ≥ M21 , the agent’s IC constraints are
satisfied after any history ht , t ≥ 1. In period 1, the principal pays
w(1) =
c
, w(0) = 0,
π11
and again, the agent chooses to work.
To show the optimality of the contract, we need to show that the rent to the agent
is minimized with this contract. Under the specified contract, the agent gets a rent if
and only if the outcome in the previous period was good, and in each of those periods,
he gets
(M11 − M21 )c
.
−c + M11 w(ht , 1) =
M21
The probability of a good outcome in period t given the initial prior π 1 is
1
π M
t−1
1
,
0
and the average rent to the agent under the contract is
(1 − δ)
∞
X
t=1
t 1
δπ M
t−1
δ(M11 − M21 )c
π1
1 (M11 − M21 )c
=
(δ + (1 − δ) 1 ),
M21
1 − δ(M11 − M21 )
M21
0
which is the lower bound on the rent to the agent given in Lemma 3. Therefore, the
principal can attain the lower bound on the rent with a stationary contract, and the
cost-minimizing contract to have the agent work every period can be stationary after
the first period.
21
4.3
Necessity of Probationary Periods
This section shows that probationary periods are necessary; in the first best, the
principal wants the agent to work every period, but it is not optimal to induce working
every period in the second best. The principal is strictly better off by taking his
outside option after some histories.
Proposition 6. There exists t0 > 0 such that for any δ > 0, a contract that involves
taking the outside option after t0 consecutive bad outcomes from period 1 on gives
a strictly higher payoff to the principal than a cost-minimizing contract that induces
working in every period.
The proof of Proposition 6 goes as follows. The first step is done by Lemma 2
which shows that it is sufficient to consider the one-stage deviations of the agent.
When the IC constraints for the one-stage deviations are satisfied, the agent doesn’t
deviate more than once at a time, and all IC constraints are satisfied.
The second step is to show that by taking the outside option after some history,
the principal can lower the payments to the agent leading up to the specified history.
Consider the cost-minimizing contract from Proposition 5. If the principal takes his
outside option after t0 consecutive bad outcomes from period 1 on, the principal can
lower the payments w(0, · · · , 0, 1) for 0 ≤ k < t0 . When the reduction in rent is
| {z }
k
greater than the loss in surplus from taking the outside option, the principal prefers
to take the outside option after ht0 = (0, · · · , 0).
| {z }
t0
The number of consecutive bad outcomes before the principal takes his outside
option holds uniformly for all discount factors δ. Given the Markov matrix M , there
exists t0 such that for any discount factor δ, taking the outside option after t0 consecutive bad outcomes strictly dominates inducing the agent to work in every period.
Consider the IC constraint
0
V1
t
T +1
T +1 V1
−c + π
≥ w(h , 0) + δ (−c + πM
),
V2
V20
where π is the principal’s prior after ht , and V1 is the sum of the present compensation and the continuation value after (ht , 1). V2 , V10 , V20 are defined similarly for
(ht , 0), (ht , 0, ∅, · · · , ∅, 1), (ht , 0, ∅, · · · , ∅, 0), respectively. The principal takes his out| {z }
| {z }
T
T
22
side option for T periods after (ht , 0). We can rewrite the IC constraint as
0
V
−c + π1 (V1 − V2 ) ≥ δ (πM
− M2 M ) 10
V
2
1
(V10 − V20 ).
= δ T +1 (πM − M2 )M T
0
{z
}
|
T +1
T +1
T
informational advantage
When the principal takes his outside option, it can affect the right-hand side of the IC
in two ways. It can lower the difference in continuation values, but it can also reduce
the informational advantage of the agent. In a two-period model when the principal
takes his outside option after a bad outcome in the first period, or in an infinitehorizon model when the principal terminates the contract after a bad outcome, the
difference in continuation values becomes zero, and the IC constraint is relaxed.
But there is another channel through which taking a per-period outside option
can help the principal. The agent can create an information asymmetry by a onestage deviation, which is the source of his rent. If the principal takes his outside
option in some period, the prior on the state gets closer to the ergodic distribution of
the Markov matrix, and the agent’s informational advantage is reduced. The agent’s
informational advantage is captured by the expression multiplied to the difference in
the continuation values when the agent is induced to work again; it is the product
of the discount factors and the difference in the priors. When the principal takes his
outside option, this term is multiplied by the discount factor and becomes smaller. In
addition, with partially persistent states, the difference in the priors becomes smaller
when the principal takes his outside option, and the informational advantage becomes
even smaller. This effect on the difference in priors is unique to partially persistent
states, and it’s not present even with fully persistent states.
In any period leading up to the history after which the principal takes his outside
option, the difference in continuation values after the good outcome and the bad
outcome is reduced; the IC is relaxed in every period leading up to the history. On
the contrary, if the states were i.i.d., when the principal takes his outside option, the
levels of continuation values after the good and the bad outcomes are lowered, but the
difference in continuation values remains the same, and the incentive power remains
the same. This is true for more general outcome structures in an i.i.d. environment.
Suppose work produces a good outcome with probability pH , and shirking produces a
23
good outcome with probability pL < pH , pH , pL ∈ [0, 1]. When the principal takes his
outside option, it only affects the level of continuation values, and the difference in
continuation values after the good outcome and the bad outcome remains the same.
Proposition 6 shows that in addition to the level effect, in a persistent environment,
the outside option can reduce the informational advantage of the agent, which relaxes
the IC and lowers the incentive power of the contract.
It also follows from Proposition 6 that the agent is never tenured under a secondbest contract if all the outcomes have been bad. If the agent is tenured after T
consecutive bad outcomes from period 1 on, then there exists t0 such that the principal
is strictly better off by taking the outside option after T +t0 consecutive bad outcomes.
5
Discussion
This section presents additional results about the second-best contract. Section 5.1
presents the recursive formulation to pin down the timing of the first payment and
the outside options during the probationary period. Section 5.2 characterizes the
second-best contract when we relax Assumption 2. In Section 5.3, I discuss optimal
contracts with reports.
5.1
Recursive Formulation
From Proposition 6, we know that a second-best contract involves a probationary
period, and the principal can offer a stationary contract after two periods since the
initial payment. Until the agent is tenured, the contract is history-contingent, and
the timing of the initial payment and the outside options depends on the history of
the outcomes. I provide a recursive formulation to characterize the timing of the
initial payment and the outside options, thereby completing the characterization of
the second best.
The recursive formulation consists of two steps. The first step is to characterize
the pairs of continuation values (V1 , V2 ) with which the principal can induce working
in a given period and the IC and limited liability are satisfied in the continuation contract. From Proposition 4, I consider a second-best contract with which the agent’s
continuation value is uniformly bounded; I consider only the non-negative continuation values under the upper bound. Let S be the largest self-generating set in
24
{(π1 , 1 − π1 )|π1 ∈ [M21 , M11 ]} × [0, R̂]2 such that
S = conv({(π, V1 , V2 )|∃T ≥ 0, (π 0 , V10 , V20 ) ∈ S such that
(i)π 0 = M2 M T ,
0
V1
),
(ii)V2 = δ (−c + π
V20
c
(iii)V1 − V2 ≥
+ δ T +1 (M11 − M21 )T +1 (V10 − V20 )})
π1
0
T +1
(1)
δ(M11 −M21 )
δ
11
and R̂ = max{( M121 + 1) 1−δ(M
) + Mc21 , Lπ }. Lπ is the expected loss
c( 1−δ
+M
M21
11 −M21 )
in surplus if the principal takes his outside option forever. Lemma 2 allows us to
consider only the ICs for one-stage deviations. There is only one relevant IC after
any history, and it can be written as (1). V2 uses Lemma 1 and makes zero payment
for a bad outcome. Limited liability is captured by [0, R̂]2 .
The second step incorporates the loss in surplus under a given contract. A secondbest contract minimizes the sum of the rent to the agent and the loss in surplus
under a given contract. Let Xπ be the set of (R, L) of contracts satisfying the IC
and limited liability with uniformly bounded continuation values. The second-best
contract corresponds to min{R + L|(R, L) ∈ Xπ } where
Xπ = conv({(R, L)|∃T ≥ 0, (R1 , L1 ) ∈ XM1 , (R2 , L2 ) ∈ XM2 such that
(i)π 0 = πM T ,
T
(ii)R = δ (−(1 − δ)c + δπ
(iii)L = (1 − δ)
T
X
δ
k−1
0
R1
),
R2
(−c + πM
k=1
δ
δ
(iv)(π 0 ,
R1 ,
R2 ) ∈ S}).
1−δ
1−δ
k−1
1
T +1 0 L1
,
− u) + δ π
L2
0
(2)
Formally, Xπ consists of contracts such that the principal takes his outside option for
T periods, and the agent is induced to work again in the following period. After a good
outcome, the principal continues with a contract corresponding to (R1 , L1 ) ∈ XM1 .
After a bad outcome, the principal continues with (R2 , L2 ) ∈ XM2 .
25
Consider the following sequence of sets.
M11
δ(M11 − M21 )c
(δ + (1 − δ)
) ≤ R ≤ R̂},
1 − δ(M11 − M21 )
M21
δ(M11 − M21 )c
X20 = {(R, 0)|R2∗ ≡
≤ R ≤ R̂},
1 − δ(M11 − M21 )
X10 = {(R, 0)|R1∗ ≡
(3)
(4)
where R1∗ and R2∗ are the rents to the agent under the cost-minimizing contracts for
priors M1 and M2 from Lemma 3. Define
X1n+1 = conv({(R, L)|∃T ≥ 0, (R1 , L1 ) ∈ X1n , (R2 , L2 ) ∈ X2n such that
(i)π 0 = M1 M T ,
R1
(ii)R = δ (−(1 − δ)c + δπ
),
R2
T
X
T +1 0 L1
k−1
k−1 1
(iii)L = (1 − δ)
δ (−c + M1 M
,
− u) + δ π
L
0
2
k=1
0
T
(iv)(π 0 ,
δ
δ
R1 ,
R2 ) ∈ S}),
1−δ
1−δ
(5)
X2n+1 = conv({(R, L)|∃T ≥ 0, (R1 , L1 ) ∈ X1n , (R2 , L2 ) ∈ X2n such that
(i)π 0 = M2 M T ,
R1
(ii)R = δ (−(1 − δ)c + δπ
),
R2
T
X
k−1
k−1 1
T +1 0 L1
(iii)L = (1 − δ)
δ (−c + M2 M
− u) + δ π
,
0
L2
k=1
0
T
(iv)(π 0 ,
δ
δ
R1 ,
R2 ) ∈ S}).
1−δ
1−δ
(6)
(X1n , X2n ) corresponds to contracts where the principal takes his outside options
for at most n intervals over the infinite horizon. The next theorem establishes that Xπ
we are looking for is generated by the limit of (X1n , X2n ) as n goes to infinity. Instead
of the contraction mapping theorem, the proof relies on the monotone convergence
theorem.
Theorem 2. Define S, {X1n , X2n }∞
n=0 as in (1),(3)-(6). Let XM1 and XM2 be the limits
n
n
of X1 , X2 , and let Xπ be given by (2). A second-best contract given initial prior π
26
minimizes R + L such that (R, L) ∈ Xπ .
Once we find (R, L) ∈ Xπ that minimizes R + L, the contract can be constructed
as follows. Given (R, L) ∈ Xπ , there exist T ≥ 0, (R1 , L1 ) ∈ XM1 , (R2 , L2 ) ∈ XM2
supporting (R, L). The principal takes the outside option for T periods, and after the
first period the agent is induced to work, the continuation contract is determined by
(R1 , L1 ) and (R2 , L2 ). If the outcome is good and R1 < R1∗ , the contract continues
with (R1 , L1 ). If the outcome is good and R1 ≥ R1∗ , the agent is tenured and is paid
δ(R1 − R1∗ ) this period. The contract continues with (R1∗ , 0), the contract specified
in Proposition 5. If the outcome is bad, but R2 = R2∗ , the agent is tenured, and the
principal pays
c
, w(ht , 0) = 0
w(ht , 1) =
M21
from the following period. If the outcome is bad and 0 ≤ R2 < R2∗ , the contract continues with (R2 , L2 ). When the outcome is bad and R2 = 0, the contract terminates
after a bad outcome in the following period.
The next two results show that the continuation value of the agent during a
probationary period strictly increases after a good outcome, and the contract never
terminates after a good outcome.
Proposition 7. In the second-best contract from Theorem 1, given history ht , let R
and R1 be the agent’s continuation values after ht and (ht , 1), respectively. For any
ht such that (ht , 1) is in the probationary period, we have
R < R1 .
Corollary 1. The second-best contract from Theorem 1 never terminates after a good
outcome.
The proofs of Proposition 7 and Corollary 1 follow directly from the fact that the
agent is paid nothing during the probationary period and the agent’s continuation
value after a good outcome is higher than the continuation value after a bad outcome.
5.2
Relaxing Assumption 2
This section presents results when we relax Assumption 2 to Assumption 3. The
second-best contract is a tenure contract, and if the principal wants to take his outside
27
option in some periods in the first best, the continuation contract after tenure has a
finite memory and the payment for a good outcome is made in two levels.
21
Assumption 3 (Efficiency’). There exists π = (π1 , π2 ) such that (i) π1 < M21M+M
12
and (ii) for the parameters M, c and u, the principal wants the agent to work given
prior π in the first best. I also assume that u > 0.
Assumption 3 says that in the first best, the principal may take the outside option after a bad outcome, but the principal doesn’t want to take the outside option
forever.14 The principal wants to induce work after a good outcome. Let l be the
number of periods the principal wants to take his outside option in the first best after
a bad outcome. The following theorem states the analogue of Theorem 1.
Theorem 3. Suppose Assumption 3 holds. Let l be the number of periods the principal
wants to take his outside option in the first best after a bad outcome. If there exists
a second-best contract, there exists a second-best contract that pays only for good
outcomes and has uniformly bounded continuation values. Any such contract is a
tenure contract; once the principal makes a positive payment, the principal implements
the first-best action in all remaining periods. A possible continuation contract to
implement the first-best action after the initial payment is to offer
w(ht , 1) =
c
, w(ht , 0) = 0
M11
in the following period and to offer every period thereafter
w(ht , hk , 0) = 0, w(ht , hk , 1, 1) = w1 , w(ht , hk , 0, ∅, · · · , ∅, 1) = w2 ,
| {z }
l
for some w1 , w2 > 0 and all hk , k ≥ 1.
The proof of Theorem 3 follows from Propositions 4 and 8. Theorem 3 shows
that under Assumption 3, the second-best contract is never stationary. However,
14
u > 0 can be relaxed to u ≥ 0. The argument doesn’t change if the principal takes his outside
option when he doesn’t want the agent to work. If the principal chooses to let the agent shirk
than to take his outside option, one has to make an assumption about the off-the-equilibrium-path
strategy after getting a good outcome when the agent is supposed to shirk. Assuming the principal
terminates the contract after the agent is caught in a deviation, one can show that the agent never
works when he is supposed to shirk under an optimal contract. The rest of the argument works the
same.
28
the second-best contract has a finite memory once the principal makes a positive
payment. The payment for a bad outcome is always zero, and the payment for a
good outcome only depends on the prior on the state; the only relevant information
is whether the previous outcome was good and how many periods the principal should
take the outside option before inducing the agent to work again. The payments for
good outcomes are done in two levels.
Proposition 8. Suppose l > 0. The principal can minimize the rent and implement
the first-best action in every period by the following contract:
w(1) =
c
, w(0) = 0,
π11
w(ht , 0) = 0, w(ht , 1, 1) = w1 , w(ht , 0, ∅, · · · , ∅, 1) = w2 ,
| {z }
l
for some w1 , w2 > 0 and all ht , t ≥ 1.
The proof of Proposition 8 consists of three steps. I first derive the lower bound on
the rent when the principal wants to implement the first-best action in every period.
The next step is to show that the lower bound can be attained with two levels of
payments for good outcomes. The last step shows that the two levels of payments are
equal if and only if l = 0. Therefore, whenever l > 0, the cost-minimizing contract
provides two levels of payments for good outcomes.
When the first best involves taking the outside option in some periods, the costminimizing contract has a finite memory. Since the priors on the state after the
good and the bad outcomes differ sufficiently, it is not optimal to provide stationary
contracts. However, the agent’s IC constraint becomes simpler when the contract
only takes into account the last outcome, and the principal can minimize the rent to
the agent with two levels of payments for good outcomes.
5.3
Contracts with Reports
This section considers contracts under which the agent reports his action every period,
and the principal makes payments conditional on the history of outcomes and the
agent’s reports. It turns out that in this environment, the principal can do no better
than providing the second-best contracts characterized in Sections 4 and 5.
29
The timing is as follows. After the agent takes an action, the principal asks
the agent to report his action. The outcome is realized, and the principal makes a
payment. Denote by rt the agent’s reported action in period t and ht the outcome in
period t. A period-t history is given by ht = (r1 , h1 , r2 , h2 , · · · , rt , ht ).
Proposition 9. Suppose the principal asks the agent to report his action each period.
A contract specifies the payments and the principal’s decision to take his outside option
conditional on history ht = (r1 , h1 , r2 , h2 , · · · , rt , ht ). The contracts characterized in
Theorems 1 and 3 are optimal.
The main intuition is that the agent can always do a one-stage deviation and
report as if he didn’t deviate; this strategy provides the agent with the same amount
of rent as without reports.15 The principal can obtain the minimum rent by the
contracts in Theorems 1 and 3, and there is no need to introduce reports.
6
Conclusion
I study a model of principal-agent problem in a persistent environment and show
that an informational rent arises. When states are partially persistent, the agent’s
effort has both a payoff consequence and an informational value. If the principal
believes that the agent worked this period, the principal infers the state by observing
the outcome, and the agent’s deviation leads to a lower outcome and an information
asymmetry between the principal and the agent. Following a deviation, the agent
assigns weakly higher probabilities to the good state than the principal does in all
future periods, and the principal has to provide an informational rent.
In this environment, there are second-best contracts resembling a tenure system.
Once the principal makes a positive payment, he implements the first-best action
every period. Backloading of payments relies on common knowledge of the state at the
time of payment. In general, persistent states mean that the composition of payments
in the continuation contract matters for the agent’s IC, and replacing a continuation
contract affects ICs in earlier periods. However, in this setting, the principal makes
15
The revelation principle says that it is sufficient to consider as the message space the set of private
information of the agent and that the agent reports truthfully. In this setting, this corresponds to
the priors of the agent or the past deviations. The sufficiency of the ICs for one-stage deviations
means that the past deviations are already accounted for in the IC constraints. The agent’s action
in the current period is captured in the IC constraint, and there’s no need for an additional message.
30
payments only for good outcomes, and the principal and the agent both learn that
they’re in the good state if they observe a good outcome. Therefore, the principal
can replace continuation contracts after good outcomes and delay payments until he
can implement the first-best actions.
After the agent is tenured, the principal offers the cost-minimizing contract, which
either becomes stationary or has a finite memory. If the principal uses his information
to reduce the rent, the agent can deviate and get a positive rent from the one-stage
deviation. One way to prevent the deviation is to always provide the payments as
if the previous state was bad; if the first best involves working in every period, the
stationary contract minimizes the rent to the agent. The same principle holds for the
second-best contract when the first best involves taking the outside option in some
periods. The continuation contract after tenure is not stationary, but it can be done
with two levels of payments for good outcomes. The second-best contract has a finite
memory after the agent is tenured.
I also show that the probationary period is necessary in a second-best contract. If
the principal takes his outside option after enough number of bad outcomes, he can
reduce the informational advantage of the agent. The principal can relax the IC at
every node leading up to the specified history. Taking the outside option lowers the
levels of continuation values in an i.i.d. environment as well, but persistence implies
that the incentive power of the contract is also lowered. With fully persistent states,
the incentive power is lowered through discounting, but partially persistent states
imply that there is another channel through which the priors converge to the ergodic
distribution. The difference in continuation values is lowered if the principal takes
his outside option, and this is a unique feature of persistent states.
A
Proofs
Proof of Proposition 2. There are four IC constraints to consider: There are two IC
constraints in the second period after a good outcome or a bad outcome in the first
period, and there is the IC constraint for the one-stage deviation in the first period
and the IC constraint for the double deviation. When the agent deviates in both
periods, he gets w(0) + δw(0, 0), and the IC constraint for the double deviation is
implied by the IC constraint for the one-stage deviation and the IC constraint in the
second period after a bad outcome.
31
The relevant IC constraints are
w(1, 1)
R1 = −c + M1
≥ w(1, 0),
w(1, 0)
w(0, 1)
R0 = −c + M2
≥ w(0, 0),
w(0, 0)
w(0, 1)
1
1 w(1) + δR1
≥ w(0) + δ(−c + π M
,
−c + π
w(0) + δR0
w(0, 0)
where M1 and M2 are the first and the second rows of M .
One can verify that the IC constraints are satisfied under the given contract, and
the given contract yields the rent specified in Proposition 1.
Proof of Proposition 3. From Proposition 1, if the principal wants the agent to work
in both periods, the minimum rent is
δc(M11 − M21 )
π11
.
M21
If the principal takes his outside option after the good outcome in the first period
but wants the agent to work both in the first period and the second period after the
bad outcome, he has to leave the same amount of rent as inducing the agent to work
in both periods. Since the outside option is inefficient, the principal never wants to
take his outside option after the good outcome in the first period.
If the principal takes his outside option after the bad outcome in the first period,
the principal doesn’t have to leave any rent to the agent. The IC constraint in the
first period becomes
1 w(1) + δR1
−c + π
≥ w(0),
w(0)
and the principal can offer
w(0) = w(1, 0) = 0,
c
w(1) = 1 ,
π1
c
w(1, 1) =
.
M11
Since the principal is already leaving no rent, the principal prefers to have the agent
work in the first period and the second period after the good outcome. The loss in
32
surplus in this case is
δπ21 (−c + M21 − u).
If the principal takes his outside option in the first period, the second period
problem becomes the same as the one-period model, and the principal can induce
working in the second period without leaving any rent. The loss in surplus is
−c + π11 − u.
If the principal mixes the continuation contract, it has the same effect as taking
the linear combination of the IC constraints, and it convexifies the set of payoffs.
Therefore, the principal’s problem is to choose the contract that minimizes the
sum of the rent and the loss in surplus, and he prefers to leave the rent to the agent if
the loss from taking the outside option is greater than the rent. This happens when
δc(M11 − M21 )
π11
< min{−c + π11 − u, δπ21 (−c + M21 − u)}.
M21
If the inequality doesn’t hold, the expected loss in surplus from taking the outside
option in some period is smaller than the rent to the agent, and the principal prefers
to take his outside option in that period. The agent receives no rent.
Proof of Theorem 1. The existence of a second-best contract follows from Theorem 2.
Since X1∞ , X2∞ are closed sets, the set of (R, L) corresponding to contracts that satisfy
the IC and limited liability, pay only for good outcomes and have uniformly bounded
continuation values is closed. There exists (R, L) ∈ Xπ that minimizes R + L. The
rest of the proof follows from Propositions 4, 5 and 6.
I will first show Lemma 2 and then Lemma 1.
Proof of Lemma 2. Randomizing the continuation contracts is the same as taking the
linear combination of the IC constraints, and it is sufficient to prove the lemma for
pure strategies. Suppose the principal takes his outside option for k ≥ 0 times after
history (ht , 0). The IC constraint for the one-stage deviation after ht is given by
0
V1
t
k+1
k+1 V1
−c + π
≥ w(h , 0) + δ (−c + πM
),
V2
V20
33
where π is the principal’s prior after ht when he believes that the agent worked in
every period, and V1 is the sum of the present compensation and the continuation
value after (ht , 1). V2 , V10 , and V20 are defined analogously for (ht , 0),(ht , 0, ∅, · · · , ∅, 1)
| {z }
k
and (ht , 0, ∅, · · · , ∅, 0). Remember ∅ refers to a period in which the principal takes
| {z }
k
his outside option.
By subtracting V2 = w(ht , 0) + δ k+1 (−c + M2 M k
that the IC constraint is equivalent to
−c + π1 (V1 − V2 ) ≥ δ
k+1
V10
V20
) from both sides, we know
0
V1
,
(πM − M2 )M
V20
k
which is again equivalent to
V1 − V2 ≥
c
+ (δ(M11 − M21 ))k+1 (V10 − V20 ).
π1
Suppose there is a finite sequence of deviations with which the agent is strictly
better off. If the agent deviated after history ht−1 , his prior at the beginning of period
t+1 is given by π t M . From the positive persistence, the agent assigns a strictly higher
probability to the good state than the principal does, and we have
1
πM
> π1 .
0
t
Similarly, if the agent deviated at any point in history ht , his prior at the beginning
of period t + 1, π̂, satisfies π̂1 ≥ π1 . If the agent deviated in history ht , the agent’s
IC constraint for working in period t + 1 is given by
0
V1
t
k+1
k+1 V1
− c + π̂
≥ w(h , 0) + δ (−c + π̂M
)
V2
V20
c
+ (δ(M11 − M21 ))k+1 (V10 − V20 ).
⇔V1 − V2 ≥
π̂1
From
π̂1 ≥ π1 ,
the agent prefers to work in period t + 1 even if he has deviated previously, as long
as the IC constraint for the one-stage deviation after ht is satisfied. By backward
34
induction, the agent doesn’t gain from a finite sequence of deviations.
The last step of the proof is continuity at infinity. When the agent’s continuation
value is uniformly bounded from above, limited liability implies that the payments
are uniformly bounded from above. If the agent deviates, he changes the probability
distribution over the histories, and there is a uniform bound on the agent’s deviation
payoff. We have continuity at infinity.
Limited liability is satisfied by non-negative payments. Therefore, if a contract
has uniformly bounded continuation values and satisfies limited liability and the IC
constraints for one-stage deviations when the agent has never deviated before, then
it satisfies all IC constraints and limited liability.
Proof of Lemma 1. The first step is to show that given a contract that satisfies the
IC and limited liability, we can find a contract that provides the same payoffs to the
principal and the agent, satisfies all the constraints and pays only for good outcomes.
Suppose a contract satisfies the IC and limited liability, and the principal makes
a positive payment for history ht with ht = 0. Let k be the maximum k < t such
that hk = 1 in the history ht . The principal can frontload the payment so that
ŵ(hk−1 , 1) = w(hk−1 , 1) + δ t−k P w(ht ) and ŵ(ht ) = 0, where P is the conditional
probability of reaching history ht from hk if the agent works every period when the
principal doesn’t take his outside option. If k = 0, lower the payment for ht to
ŵ(ht ) = 0; if the principal takes his outside option for l periods from period 1, let
ŵ(∅, · · · , ∅, 1) = w(∅, · · · , ∅, 1) + π̂11 δ t−l−1 P w(ht ). P is the probability of reaching
| {z }
| {z }
l
l
history ht if the agent works every period when the principal doesn’t take his outside
option, and π̂1 is the prior on the good state in the first period the agent is induced to
work. For every other history hk , let ŵ(hk ) = w(hk ), and keep the principal’s outside
option the same in both contracts.
If the agent works every period when the principal doesn’t take his outside option,
the agent’s ex-ante payoff is the same with both contracts. Consider a deviation
strategy σ. If the agent’s payoff with σ with ŵ is weakly lower than the agent’s payoff
with σ with w for all σ, then the agent’s deviation payoff is bounded from above by his
payoff from working every period when the principal doesn’t take his outside option;
all the ICs are satisfied with ŵ. When we fix a deviation strategy σ, the probability
distribution over the histories are the same with both contracts. The only difference
in the agent’s payoff is that in the original contract, the agent is paid w(ht ) and in the
35
new contract, the agent is paid more for ŵ(hk−1 , 1) or ŵ(∅, · · · , ∅, 1). First consider
| {z }
l
the case k ≥ 1. When the agent deviates, he increases the probability of getting a
bad outcome. We have
δ t−1 Pr(ht |σ)w(ht ) − δ k−1 Pr(hk−1 , 1|σ)δ t−k P w(ht )
=δ t−1 (Pr(ht |σ) − Pr(hk−1 , 1|σ)P )w(ht ) ≥ 0.
Similarly, we can show
1
Pr(ht |σ)w(ht ) − Pr(∅, · · · , ∅, 1|σ) P w(ht ) ≥ 0.
| {z }
π̂1
l
The agent’s payoff with a strategy σ is weakly lower with ŵ than with w, and since
the agent’s payoff with w is maximized by working in every period when the principal
doesn’t take his outside option, the agent prefers to work every period with ŵ. The
ICs are satisfied.
Limited liability is satisfied since all payments are non-negative. The rent to the
agent is the same under the new contract. The agent works after the same set of
histories as before, and the principal’s payoff is the same under the new contract.
Therefore, the principal can frontload the payment whenever he makes a positive
payment for a bad outcome.
The second step of the proof is to show that given a contract that satisfies the IC
and limited liability and pays only for good outcomes, we can find a contract that
satisfies all the constraints, provides the same payoffs to the principal and the agent,
pays only for good outcomes and has uniformly bounded continuation values.
Suppose contract 1 satisfies the IC and limited liability and pays only for good
outcomes. Let R̄ be the maximum rent to the agent if the principal offers w(ht , 1) =
c
, w(ht , 0) = 0 every period.
M21
Consider the following contract (contract 2). The principal takes his outside
option after the same set of histories as with contract 1. Let V (ht ) and V̂ (ht ) be
the sum of the present compensation and the agent’s continuation value after ht in
contracts 1 and 2, respectively. Let T be the first period along history hT such
that V (hT ) > R̄ and hT 6= ∅. w(ht ) and ŵ(ht ) are the payments after history ht
in contracts 1 and 2, respectively. For any ht = (hT , hi ), i ≥ 0, the principal offers
36
ŵ(ht , 1) = Mc21 , ŵ(ht , 0) = 0 every period he doesn’t take his outside option. For any
other history hj , let ŵ(hj ) = w(hj ). Suppose the principal takes his outside option
for k periods after hT . If
V̂ (hT , ∅, · · · , ∅, 1) − V̂ (hT , ∅, · · · , ∅, 0) > V (hT , ∅, · · · , ∅, 1) − V (hT , ∅, · · · , ∅, 0),
| {z }
| {z }
| {z }
| {z }
k
k
k
k
let
ŵ(hT , ∅, · · · , ∅, 0)
| {z }
k
T
=V̂ (h , ∅, · · · , ∅, 1) − V̂ (hT , ∅, · · · , ∅, 0) − (V (hT , ∅, · · · , ∅, 1) − V (hT , ∅, · · · , ∅, 0)).
| {z }
| {z }
| {z }
| {z }
k
k
k
k
Lastly, pick ŵ(hT ) so that V̂ (hT ) = V (hT ). Since V (hT ) > R̄, ŵ(hT ) is non-negative.
Then, under contract 2, the continuation values after hT are uniformly bounded, all of
the IC and limited liability are satisfied, and the payoffs of the principal and the agent
remain the same as in contract 1. Therefore, along any history ht , if the continuation
value of the agent becomes larger than R̄, we can find a new contract such that it is
the only time in that history that the continuation value of the agent is above R̄.
Suppose T is the first period such that V (hT ) > R̄ and hT 6= ∅. We’re done
if T = 1; assume T > 1. V (hT ) > R̄ implies V (hT −1 , 1) > R̄, and there are two
cases to consider; the first case is V (hT −1 , 1) > R̄ > V (hT −1 , 0), and the other
case is V (hT −1 , 1), V (hT −1 , 0) ≥ R̄. First, suppose V (hT −1 , 1) > R̄ > V (hT −1 , 0).
It also follows from V (hT −1 , 1) > R̄ that the principal can offer ŵ(hT −1 , 1, hi , 1) =
c
, ŵ(hT −1 , 1, hi , 0) = 0 for all i ≥ 0, hi when he doesn’t take his outside option.
M21
Consider the IC for the one-stage deviation after hT −1 . If the principal takes his
outside option for k periods after (hT −1 , 0), the IC is
V (hT −1 , 1) − V (hT −1 , 0) ≥
c
+ (δ(M11 − M21 ))k+1 (V10 − V20 )
π1
where V10 , V20 are the sum of the present compensation and the continuation value after
(hT −1 , 0, ∅, · · · , ∅, 1) and (hT −1 , 0, ∅, · · · , ∅, 0), respectively. Then from V (hT −1 , 0) <
| {z }
| {z }
k
k
R̄, (δ(M11 − M21 ))k+1 (V10 − V20 ) is uniformly bounded from above. In particular,
there exists a uniform upper bound R̃ > R̄ on V (hT −1 , 1) such that if V (hT −1 , 1)
37
is above R̃, the principal can lower ŵ(hT −1 , 1) so that V̂ (hT −1 , 1) ≤ R̃ and the IC
for the one-stage deviation is satisfied. The principal can increase ŵ(hT −1 ) to have
V̂ (hT −1 ) = V (hT −1 ).
If V (hT −1 , 1), V (hT −1 , 0) ≥ R̄, the principal can offer ŵ(hT −1 , hi , 1) = Mc21 , ŵ(hT −1 , hi , 0) =
0 for all i ≥ 0, hi . If V̂ (hT −1 , 1)−V̂ (hT −1 , 0) > V (hT −1 , 1)−V (hT −1 , 0), let ŵ(hT −1 , 0) =
V̂ (hT −1 , 1) − V̂ (hT −1 , 0) − (V (hT −1 , 1) − V (hT −1 , 0)). Let k be the maximum k < T
such that hk 6= ∅ in hT , and pick ŵ(hk ) so that V̂ (hk ) = V (hk ).
Since the continuation values are bounded, we know from Lemma 2 that the
IC constraints for one-stage deviations when the agent has never deviated before are
sufficient. Therefore, given contract 1, the principal can find a new contract (contract
2) with the same payoffs that satisfies all the constraints and has uniformly bounded
continuation values; the uniform bound on the continuation values of the agent after
the first period is R̃. We can repeat the argument from the first part of the proof and
frontload the payments; there exists a contract that (i) satisfies all constraints, (ii)
pays only for good outcomes, (iii) has uniformly bounded continuation values after
the first period and (iv) provides the same payoffs of the principal and the agent as
in the original contract.
Proof of Proposition 6. Suppose the principal wants the agent to work in every period. Let V1t , V2t be the sum of the present compensation and the continuation value
after history (0, · · · , 0, 1) and (0, · · · , 0). In period 1, the IC constraint for the one| {z }
| {z }
t−1
t
stage deviation is given by
−c+
π11 V11
⇔V11 − V21 ≥
+
π21 V21
2
V
≥ w(0) + δ(−c + π M 12 )
V2
1
c
+ δ(M11 − M21 )(V12 − V22 ),
1
π1
and for t ≥ 2, the IC constraint for the one-stage deviation is given by
−c+
M21 V1t
+
M22 V2t
t+1 V
≥ w(0, · · · , 0) + δ(−c + M2 M 1t+1 )
| {z }
V2
t
⇔V1t
−
V2t
c
≥
+ δ(M11 − M21 )(V1t+1 − V2t+1 ).
M21
38
We know from Proposition 5 that the principal can offer
c
, w(0) = 0,
π11
c
, w(ht , 0) = 0, ∀ht , t ≥ 1.
w(ht , 1) =
M21
w(1) =
to have the agent work in every period. Under the cost-minimizing contract, the IC
constraints are strictly binding after (0, · · · , 0), ∀t ≥ 0.
| {z }
t
I will now show that by taking his outside option after ht0 = (0, · · · , 0), the
| {z }
t0
principal can lower the payments w(0, · · · , 0, 1) for 0 ≤ t < t0 , and therefore, the rent
| {z }
t
to the agent is reduced. If the reduction in rent is greater than the loss in surplus
by taking the outside option, the principal prefers to take his outside option after
ht0 = (0, · · · , 0).
| {z }
t0
The cost-minimizing contract from Proposition 5 has uniformly bounded continuation values. From Lemma 2, it is sufficient to consider the IC constraints for
the one-stage deviations. Suppose the principal takes his outside option once after
ht0 = (0, · · · , 0). After taking the outside option, the principal continues to pay
| {z }
t
t0
c
, w(ht , 0) =
M21
t0 −1
w(h , 1) =
IC constraint after h
0 for all histories ht = (ht0 , ∅, hk ), ∀k ≥ 0, hk . Consider the
= (0, · · · , 0). We have
| {z }
t0 −1
V1t0 − V2t0 ≥
c
+ (δ(M11 − M21 ))2 (V̂1t0 +2 − V̂2t0 +2 ),
M21
where V̂1t0 +2 is the sum of the present compensation and the continuation value after
(ht0 , ∅, 1). V̂2t0 +2 is defined for (ht0 , ∅, 0). We also have
V̂1t0 +2 − V̂2t0 +2 = Ṽ1t0 +1 − Ṽ2t0 +1 =
1
c
,
M21 1 − δ(M11 − M21 )
where Ṽ1t0 +1 is the sum of the present compensation and the continuation value after
the good outcome, from the contract in Proposition 5. Ṽ2t0 +1 is defined for the bad
outcome.
39
Note that the IC constraint after ht0 −1 in the contract from Proposition 5 is
V1t0 − V2t0 ≥
c
+ δ(M11 − M21 )(Ṽ1t0 +1 − Ṽ2t0 +1 ).
M21
Therefore, by taking his outside option after ht0 = (0, · · · , 0), the IC constraint after
| {z }
t0
ht0 −1 = (0, · · · , 0) is relaxed by
| {z }
t0 −1
δ(M11 − M21 )(1 − δ(M11 − M21 ))
c
1
c
= δ(M11 − M21 )
.
M21 1 − δ(M11 − M21 )
M21
The principal can lower the payment w(ht0 −1 , 1) by δ(M11 −M21 ) Mc21 . By an inductive
argument, we have that V1k − V2k for 1 ≤ k ≤ t0 can be reduced by
(δ(M11 − M21 ))t0 −k+1
c
.
M21
V1k and V2k for 1 ≤ k ≤ t0 can be reduced by
δ t0 −k+1 (M11 − M21 )(
and
δ
t0 −k+1
1
1 − (M11 − M21 )t0 −k
+
(M11 − M21 )t0 −k )c
1 − (M11 − M21 )
M21
1 − (M11 − M21 )t0 −k
(M11 − M21 )
c,
1 − (M11 − M21 )
respectively.
Since
δ t0 −k+1 (M11 − M21 )(
1 − (M11 − M21 )t0 −k
1
+
(M11 − M21 )t0 −k )c
1 − (M11 − M21 )
M21
increases with k and, for k ≤ t0 , is bounded from above by
δ t0 −k+1 (M11 − M21 )(
≤δ(M11 − M21 )
<
c
,
M21
1 − (M11 − M21 )t0 −k
1
+
(M11 − M21 )t0 −k )c
1 − (M11 − M21 )
M21
c
M21
40
the principal can lower w(0, · · · , 0, 1) for 2 ≤ k ≤ t0 by
| {z }
k−1
δ t0 −k+1 (M11 − M21 )(
1 − (M11 − M21 )t0 −k
1
+
(M11 − M21 )t0 −k )c.
1 − (M11 − M21 )
M21
From period 1, the rent to the agent is reduced by
π21 ∆V21 = π21 δ t0 (M11 − M21 )
1 − (M11 − M21 )t0 −1
c.
1 − (M11 − M21 )
On the other hand, the loss in surplus from taking the outside option is
δ t0 π21 (M22 )t0 −1 (−c + M21 − u).
Both the loss in surplus and the reduction in rent are discounted by δ t0 . Apart
from the discounting, the loss in surplus converges to zero as t0 goes to infinity, while
the reduction in rent in the limit is bounded away from zero. Therefore, there exists
t0 such that
1 − (M11 − M21 )t0 −1
(M11 − M21 )c > (M22 )t0 −1 (−c + M21 − u),
1 − (M11 − M21 )
and for any discount factor δ > 0, the principal strictly prefers to take his outside
option after ht0 = (0, · · · , 0) than to have the agent work in every period.
| {z }
t0
Proof of Theorem 2. The first step is to find the set of pairs of (V1 , V2 ) with which
the agent is induced to work in a given period and the continuation contract satisfies the IC and limited liability. Following Proposition 4, I consider a secondbest contract with which the agent’s continuation value is uniformly bounded. I
consider only the non-negative continuation values under the upper bound R̂ =
δ(M11 −M21 )
δ
11
max{( M121 + 1) 1−δ(M
c( 1−δ
+ M
) + Mc21 , Lπ } where Lπ is the expected loss
M21
11 −M21 )
in surplus when the principal takes his outside option forever. Define S to be the
41
largest self-generating set in {(π1 , 1 − π1 )|π1 ∈ [M21 , M11 ]} × [0, R̂]2 such that
S = conv({(π, V1 , V2 )|∃T ≥ 0, (π 0 , V10 , V20 ) ∈ S such that
(i)π 0 = M2 M T ,
(ii)V2 = δ
T +1
(−c + π
(iii)V1 − V2 ≥
0
V10
),
V20
c
+ δ T +1 (M11 − M21 )T +1 (V10 − V20 )}).
π1
Since mixing the continuation contracts is the same as taking the linear combination
of the IC constraints, we can focus on the pure strategies and take the convex hull.
From Lemma 2, it is sufficient to consider the one-stage deviations. Using Lemma 1,
I will consider contracts under which the principal makes positive payments only for
the good outcomes. Limited liability are taken care of by [0, R̂]2 .
Suppose the principal wants the agent to work after history ht and he takes his
outside option for T ≥ 0 periods after history (ht , 0). Let V1 be the sum of the present
compensation and the continuation value after (ht , 1). Define V2 , V10 and V20 similarly
for (ht , 0), (ht , 0, ∅, · · · , ∅, 1) and (ht , 0, ∅, · · · , ∅, 0). Let π be the prior on the state
| {z }
| {z }
T
T
after history ht . The IC constraint after history ht is
0
V1
T +1
T +1 V1
−c + π
≥ δ (−c + πM
).
V2
V20
Subtracting
V2 = δ
T +1
0
V1
(−c + π
)
V20
0
from both sides, we get
V1 − V2 ≥
c
+ δ T +1 (M11 − M21 )T +1 (V10 − V20 ).
π1
Conversely, if there exists T ≥ 0, V10 , V20 such that
V2 = δ
V1 − V2 ≥
T +1
0
V1
(−c + π
),
V20
0
c
+ δ T +1 (M11 − M21 )T +1 (V10 − V20 )
π1
42
hold, and the agent is induced to work given prior π 0 = M2 M T and V10 , V20 , then the
agent is induced to work, given prior π and V1 , V2 .
Therefore, the set of feasible continuation values to induce work is given by the
largest self-generating set in {(π1 , 1 − π1 )|π1 ∈ [M21 , M11 ]} × [0, R̂]2
S = conv({(π, V1 , V2 )|∃T ≥ 0, (π 0 , V10 , V20 ) ∈ S such that
(i)π 0 = M2 M T ,
(ii)V2 = δ
T +1
(−c + π
(iii)V1 − V2 ≥
0
V10
),
V20
c
+ δ T +1 (M11 − M21 )T +1 (V10 − V20 )}).
π1
The next step is to characterize the set of (R, L) for all contracts that satisfy the
IC and limited liability and have uniformly bounded continuation values. Let Xπ be
the set of (R, L) for all such contracts with the initial prior π, where R is the rent to
the agent and L is the loss in surplus under the contract. L is defined to be
L = (1 − δ)(YF B − Y ),
where YF B is the expected discounted sum of the outcome subtracted by the cost in
the first best, and Y is the expected discounted sum of the outcome subtracted by the
cost under the given contract. Given prior π, there exists a contract with the rent R
and the loss L if the following is satisfied: The principal takes his outside option for
T ≥ 0 periods, and in the first period the agent is induced to work, the continuation
contracts after the good outcome and the bad outcome have (R1 , L1 ) and (R2 , L2 ),
respectively. Specifically, Xπ is given by
Xπ = conv({(R, L)|∃T ≥ 0, (R1 , L1 ) ∈ XM1 , (R2 , L2 ) ∈ XM2 such that
(i)π 0 = πM T ,
R1
(ii)R = δ (−(1 − δ)c + δπ
),
R2
T
X
T +1 0 L1
k−1
k−1 1
,
(iii)L = (1 − δ)
δ (−c + πM
− u) + δ π
L
0
2
k=1
0
T
(iv)(π 0 ,
δ
δ
R1 ,
R2 ) ∈ S}),
1−δ
1−δ
43
where Condition (ii) and (iv) use the fact that there is no loss of generality in delaying
the payments.
I will show that XM1 and XM2 can be found as limits of two sequences of sets.
Once we find XM1 and XM2 , Xπ for π1 ∈ [M21 , M11 ] is generated from XM1 and XM2 .
Consider the sequences of sets, {X1n } and {X2n }:
δ(M11 − M21 )c
M11
(δ + (1 − δ)
) ≤ R ≤ R̂},
1 − δ(M11 − M21 )
M21
δ(M11 − M21 )c
X20 = {(R, 0)|R2∗ ≡
≤ R ≤ R̂},
1 − δ(M11 − M21 )
X10 = {(R, 0)|R1∗ ≡
where R1∗ and R2∗ are the rents to the agent under the cost-minimizing contracts for
initial priors M1 and M2 , and
X1n+1 = conv({(R, L)|∃T ≥ 0, (R1 , L1 ) ∈ X1n , (R2 , L2 ) ∈ X2n such that
(i)π 0 = M1 M T ,
T
(ii)R = δ (−(1 − δ)c + δπ
(iii)L = (1 − δ)
T
X
δ
k−1
0
R1
),
R2
(−c + M1 M
k−1
k=1
1
T +1 0 L1
− u) + δ π
,
0
L2
δ
δ
R1 ,
R2 ) ∈ S}),
1−δ
1−δ
= conv({(R, L)|∃T ≥ 0, (R1 , L1 ) ∈ X1n , (R2 , L2 ) ∈ X2n such that
(iv)(π 0 ,
X2n+1
(i)π 0 = M2 M T ,
T
(ii)R = δ (−(1 − δ)c + δπ
(iii)L = (1 − δ)
T
X
δ
k−1
0
R1
),
R2
(−c + M2 M
k=1
δ
δ
(iv)(π 0 ,
R1 ,
R2 ) ∈ S}).
1−δ
1−δ
Define
X1∞ = lim X1n ,
n→∞
X2∞
= lim X2n .
n→∞
44
k−1
1
T +1 0 L1
− u) + δ π
,
0
L2
X1∞ and X2∞ are the sets of (R, L) we are looking for. Before proving XM1 = X1∞
and XM2 = X2∞ , I will first show that X1∞ and X2∞ are well-defined.
For all n ≥ 1, we have
∞
X
1
L ≤ (1 − δ)
− u) ≡ L∗1 , ∀(R, L) ∈ X1n ,
δ (−c + M1 M
0
k=1
∞
X
k−1
k−1 1
L ≤ (1 − δ)
− u) ≡ L∗2 , ∀(R, L) ∈ X2n .
δ (−c + M2 M
0
k=1
k−1
k−1
Each Xin is of the form
Xin = {(R, L)|fin (L) ≤ R ≤ R̂, 0 ≤ L ≤ L∗i }
for some function
fin : [0, L∗i ] → [0, Ri∗ ].
For each i and n, fin (·) is weakly decreasing in L, and from Xin ⊂ Xin+1 , ∀n ≥ 0, i =
1, 2, we know that
fin+1 (L) ≤ fin (L), ∀0 ≤ L ≤ L∗i , n ≥ 1, i = 1, 2.
Together with R ≥ 0, the monotone convergence theorem gives that the limits
X̄i∞ ≡ {(R, L)|R = lim fin (L), 0 ≤ L ≤ L∗i }, i = 1, 2,
n→∞
are well-defined and downward-sloping. Therefore,
Xi∞ = {(R, L)| lim fin (L) ≤ R ≤ R̂, 0 ≤ L ≤ L∗i }, i = 1, 2
n→∞
are well-defined.
That any (R, L) ∈ X1∞ and X2∞ are feasible given priors M1 and M2 can be shown
as follows. Let Yi be the set generated by X1∞ and X2∞ for the initial prior Mi . Given
> 0 and (R, L) ∈ Yi , there exists n such that (R + , L) ∈ Xin . Therefore, Yi lies in
the limit of Xin , and we have
Yi ⊂ Xi∞ , i = 1, 2.
45
On the other hand, we know that each Yi is closed, and
Yi ⊃ Xi∞ \ X̄i∞ .
Together, Yi = Xi∞ for i = 1, 2 and X1∞ andX2∞ are jointly self-generating.
Conversely, if (R, L) is feasible given M1 or M2 , we can show that it’s in X1∞ or X2∞ ,
respectively. Note that if the principal takes his outside option for T blocks under the
given contract, (R, L) ∈ XiT ⊂ Xi∞ . For contracts under which the principal takes his
outside option for an infinite number of blocks, we can construct a truncated contract
as follows. Given T , for each history hT , pay the sum of the present compensation
and the continuation value after history hT . From period T + 1 and on, take the
outside option forever. This replacement contract weakly relaxes the IC constraints
of the agent, and it provides exactly the same amount of rent to the agent. The
loss in surplus under the contract differs from the original contract by at most δ T L∗i ,
depending on whether hT = 1 or 0. For given > 0, the principal can choose
T sufficiently large so that the replacement contract lies within from the original
contract in the set of (R, L). This implies that any feasible (R, L) lies in the limits
X1∞ and X2∞ .
Together, we get XM1 = X1∞ and XM2 = X2∞ .
Once we have XM1 = X1∞ and XM2 = X2∞ , Xπ for any prior π can be constructed
from XM1 and XM2 . The second-best contract given the prior π minimizes R + L
in Xπ , and it can be constructed as follows. Given (R, L) ∈ Xπ , there exist T ≥
0, (R1 , L1 ) ∈ XM1 , (R2 , L2 ) ∈ XM2 supporting (R, L). The principal takes the outside
option for T periods, and after the first period the agent is induced to work, the
continuation contract is determined by (R1 , L1 ) and (R2 , L2 ). The contract continues
in a probationary period if the outcome is good and 0 < R1 < R1∗ or if the outcome
is bad and 0 < R2 < R2∗ . In this case, the continuation contract is (R1 , L1 ) if the
outcome is good, and it’s (R2 , L2 ) if the outcome is bad. If the outcome is bad and
R2 = 0, the contract continues with (0, L2 ), and it terminates after a bad outcome in
the following period. If the outcome is good and R1 ≥ R1∗ , the agent is tenured, and
δ(R1 −R1∗ ) is provided as the initial payment. From the following period, the contract
continues with (R1∗ , 0), and the payments are given by the contract in Theorem 1. If
the outcome is bad but R2 = R2∗ given (ht , 0), again, the agent is tenured, and the
46
principal provides
w(ht , 0, hk , 1) =
c
, w(ht , 0, hk , 0) = 0, ∀hk , k ≥ 0,
M21
from the following period.
Proof of Proposition 7. From Assumption 2, the principal takes his outside option
when the agent is not induced to work. Therefore, any outcome is on the equilibrium
path from the principal’s perspective, and the principal provides the payments specified in the contract. In particular, after each good outcome, the continuation value of
the agent is exactly the amount the principal intends to provide under the contract.
During the probationary period, the agent is not paid anything. The agent’s
continuation value R can be written as
R = −c + π1 V1 + π2 V2
< −c + V1
= −c + δR1
< R1 ,
where π is the prior on the state after ht , and the first inequality follows from V1 > V2
under a second-best contract.
Proof of Corollary 1. If the contract terminates, the agent’s continuation value is
zero. From R1 > R ≥ 0, the agent’s continuation value is strictly positive after a
good outcome, and the contract doesn’t terminate.
Proof of Theorem 3. The proof follows from Propositions 4 and 8. Under Assumption 3, the principal doesn’t terminate the contract after a bad outcome in the first
best, and the rest of the proof works the same in Proposition 4.
Proof of Proposition 8. I will show the proposition in three steps. I first derive the
lower bound on the agent’s continuation values. Then, I show that the lower bound
can be achieved with two levels of payments. The last step is to show that the two
levels are not equal for l > 0.
First, consider the agent’s IC constraints when the principal implements the firstbest action in every period. Specifically, the principal never takes his outside option
47
after a good outcome, but he takes the outside option for l periods after a bad
outcome. The IC constraint for the one-stage deviation is given by
0
V1
t
l+1
l+1 V1
),
−c + π
≥ w(h , 0) + δ (−c + πM
V20
V2
where V1 , V2 , V10 and V20 are the sum of the present compensation and the continuation value after histories (ht , 1), (ht , 0), (ht , 0, ∅, · · · , ∅, 1) and (ht , 0, ∅, · · · , ∅, 0), re| {z }
| {z }
l
l
spectively. In characterizing the payoffs, we know from Lemma 1 that we can restrict
attention to contracts where the principal makes positive payments only for good
outcomes. V2 is given by
V2 = δ
l+1
0
V1
(−c + M2 M
).
V20
l
Subtracting V2 from both sides of the IC constraint and rearranging the inequality,
we get
c
+ (δ(M11 − M21 ))l+1 (V10 − V20 ),
V1 − V2 ≥
π1
and since V1 − V2 is uniformly bounded in an optimal contract,
V1 − V2 ≥
V2 ≥
(δ(M11 − M21 ))l+1
c
c
,
+
l+1
π1 1 − (δ(M11 − M21 )) M2 M l 10
δ l+1
(δ(M11 − M21 ))l+1
c,
1 − δ l+1 1 − (δ(M11 − M21 ))l+1
c
(δ(M11 − M21 ))l+1
V1 ≥
+
π1 1 − (δ(M11 − M21 ))l+1
δ l+1
1
+
1 − δ l+1
M2 M l 10
!
c.
The next step is to show that two levels of payments for good outcomes, one for
prior M1 and the other for M2 M l , implement the lower bound. Define P1 and P2 be
the discounted sum of the probabilities of a good outcome when the agent takes the
first-best action every period, for prior M1 and M2 M l . From
1 + δP1
P1 = M1
,
δ l+1 P2
l 1 + δP1
P2 = M2 M
,
δ l+1 P2
48
we get
P1 =
P2 =
0
− M12 M2 M l 10 )
1
δ l+1 M2 M l 01 ) − δ l+2 M12 M2 M l
M2 M l 10
δ l+1 M2 M l 01 ) − δ l+2 M12 M2 M l
M11 − δ l+1 (M11 M2 M l
(1 − δM11 )(1 −
(1 − δM11 )(1 −
Let the payment for a good outcome given M2 M l be w2 =
,
1
0
.
1
0
c
,
M2 M l (10)
and let the
payment for a good outcome given M1 be such that
P2 (M11 w1 − c)δ l+2 =
δ l+1
(δ(M11 − M21 ))l+1
c.
1 − δ l+1 1 − (δ(M11 − M21 ))l+1
(7)
Given these payments, the agent gets a positive rent if and only if the previous
outcome was good, and the agent’s continuation value given prior M2 is exactly the
lower bound:
V2 = δ l+1 P2 × δ(M11 w1 − c) =
Let
w(1) =
δ l+1
(δ(M11 − M21 ))l+1
c.
1 − δ l+1 1 − (δ(M11 − M21 ))l+1
c
, w(0) = 0,
π1
and V1 also equals the lower bound.
Now, I will show that the agent’s IC constraint is satisfied for both priors M1 and
M2 M l . Since the continuation values are bounded with the two levels of payments, it
follows from Lemma 2 that it is sufficient to consider IC constraints for one-stage deviations. By construction, the IC constraint for M2 M l holds with equality. Consider
the IC constraint for M1 . The IC constraint is equivalent to
V1 − V2 ≥
(δ(M11 − M21 ))l+1
c
c
,
+
l+1
M11 1 − (δ(M11 − M21 )) M2 M l 10
and when the IC constraint for M2 M l holds with equality, the IC constraint is equivalent to
!
c
(δ(M11 − M21 ))l+1
1
δ l+1
+
V1 ≥
+
c.
M11 1 − (δ(M11 − M21 ))l+1 M2 M l 10
1 − δ l+1
49
When the payment w1 satisfies (7), the agent’s continuation value is given by
V1 = w1 + (M11 w1 − c)δ(1 + δP1 ).
It can be easily verified that
(δ(M11 − M21 ))l+1
(M11 w1 − c)δ(1 + δP1 ) =
1 − (δ(M11 − M21 ))l+1
1
δ l+1
+
1 − δ l+1
M2 M l 10
!
c,
and from w1 > c/M11 , the IC constraint is satisfied. In the first period, we have
c
c
(δ(M11 − M21 ))l+1
+ (M11 w1 − c)δ(1 + δP1 ) =
+
π1
π1 1 − (δ(M11 − M21 ))l+1
1
δ l+1
+
1 − δ l+1
M2 M l 10
!
c,
and the agent’s IC constraint is satisfied. Therefore, the agent’s IC constraints are
satisfied with these two levels of payments.
The last step is to show that w1 < M Mc l 1 unless l = 0, and the cost-minimizing
(0)
2
contract is not stationary for any l > 0. w1 < M Mc l 1 is equivalent to the following:
(0)
2
c
− c)
M2 M l 10
M11 − M2 M l 10
1
1
(δ(M11 − M21 ))l+1
c<δ
c,
P2 1 − δ l+1 1 − (δ(M11 − M21 ))l+1
M2 M l 10
δ(M11 w1 − c) < δ(M11
⇔
which is again equivalent to
0
l+2
l 1
((1 − δM11 )(1 − δ M2 M
) − δ M12 M2 M
)(δ(M11 − M21 ))l+1
1
0
1
<δ(1 − δ l+1 )(1 − (δ(M11 − M21 ))l+1 )(M11 − M2 M l
),
0
l+1
l+1
l
l 1
⇔ (δ(M11 − M21 )) (1 − δ − δ(1 − δ )M2 M
)
0
l+1
l 1
<δ(1 − δ )(M11 − M2 M
).
0
l+1
l
I subtracted δ l+2 (1 − δ l+1 )(M11 − M2 M l
1
0
)(M11 − M21 )l+1 from both sides to get the
50
last inequality. The last inequality can be shown by
l+1
(δ(M11 − M21 ))
(1 − δ
l+1
1
)
− δ(1 − δ )M2 M
0
l
l
≤(δ(M11 − M21 ))l+1 (1 − δ l+1 )
l+1 1
(1 − δ l+1 )
≤δ(1, −1)M
0
l 1
l 1
)(1 − δ l+1 )
− M2 M
=δ(M1 M
0
0
l+1
l 1
),
≤δ(1 − δ )(M11 − M2 M
0
and the equalities hold if and only if l = 0.
Therefore, the cost-minimizing contract to implement the first-best action in every
period is stationary if and only if l = 0.
Proof of Proposition 9. The agent’s strategy is a function of his private history. Let
at be the agent’s action in period t. His private history up to period t is ĥt =
(a1 , r1 , h1 , a2 , r2 , h2 , · · · , at , rt , ht ). Consider the following strategy for the agent: The
agent reports what the principal expects him to report on the equilibrium path in
every period the principal didn’t take his outside option. Then the principal’s prior
is exactly the same as when the principal was not allowed to ask for reports, and the
agent’s IC constraint remains the same. Therefore, the minimum rent to the agent is
the same as in the case without reports, and the second best is to provide the same
contracts from Theorems 1 and 3.
References
[1] Abreu, Dilip, Pearce, David, and Ennio Stacchetti. 1990. “Toward a Theory of Discounted Repeated Games with Imperfect Monitoring.” Econometrica
58 (5): 1041-1063.
[2] Akerlof, George A., and Lawrence F. Katz. 1989. “Workers’ Trust Funds
and the Logic of Wage Profiles.” Quarterly Journal of Economics 104 (3): 525536.
51
[3] Athey, Susan, and Kyle Bagwell. 2008. “Collusion with Persistent Cost
Shocks.” Econometrica 76 (3): 493-540.
[4] Battaglini, Marco. 2005. “Long-Term Contracting with Markovian Consumers.” American Economic Review 95 (3): 637-658.
[5] Bergemann, Dirk, and Ulrich Hege. 1998. “Venture capital financing, moral
hazard, and learning.” Journal of Banking and Finance 22 (6): 703-735.
[6] Bergemann, Dirk, and Ulrich Hege. 2005. “The Financing of Innovation:
Learning and Stopping.” RAND Journal of Economics 36 (4): 719-752.
[7] Bhaskar, V. 2012. “Dynamic Moral Hazard, Learning and Belief Manipulation.” http://www.ucl.ac.uk/∼uctpvbh.
[8] Biais, Bruno, Thomas Mariotti, Jean-Charles Rochet, and Stphane
Villeneuve. 2010. “Large Risks, Limited Liability, and Dynamic Moral Hazard.”
Econometrica 78 (1): 73-118.
[9] Chassang, Sylvain. 2010. “Building Routines: Learning, Cooperation, and the
Dynamics of Incomplete Relational Contracts.” American Economic Review 100
(1): 448-465.
[10] Clementi, Gian L., and Hugo A. Hopenhayn. 2006. “A Theory of Financing
Constraints and Firm Dynamics.” Quarterly Journal of Economics 121 (1): 229265.
[11] Cole, Harold L., and Narayana R. Kocherlakota. 2001. “Efficient allocations with hidden income and hidden storage.” Review of Economic Studies 68
(3): 523-542.
[12] DeMarzo, Peter M., Michael Fishman, Zhiguo He, and Neng Wang.
2012. “Dynamic Agency and the q Theory of Investment.” Journal of Finance
67 (6): 22952340.
[13] DeMarzo, Peter M., and Yuliy Sannikov. 2006. “Optimal Security Design
and Dynamic Capital Structure in a Continuous-Time Agency Model.” Journal
of Finance 61 (6): 2681-2724.
52
[14] DeMarzo,
Peter M.,
and Yuliy Sannikov. 2014. “Learning,
Termination, and Payout Policy in Dynamic Incentive Contracts.”
http://www.princeton.edu/∼sannikov.
[15] Dutta, Prajit K., and Roy Radner. 1994. “Optimal Principal Agent Contracts for a Class of Incentive Schemes: A Characterization and the Rate of
Approach to Efficiency.” Economic Theory 4 (4): 483-503.
[16] Escobar, Juan F., and Juuso Toikka. 2013. “Efficiency in Games with
Markovian Private Information.” Econometrica 81 (5): 1887-1934.
[17] Farhi, Emmanuel, and Ivn Werning. 2013. “Insurance and taxation over
the life cycle.” Review of Economic Studies 80 (2): 596-635.
[18] Fernandes, Ana, and Christopher Phelan. 2000. “A Recursive Formulation
for Repeated Agency with History Dependence.” Journal of Economic Theory
91 (2): 223-247.
[19] Fong, Kyna G. 2009. “Evaluating Skilled Experts: Optimal Scoring Rules for
Surgeons.” http://www.kynafong.com.
[20] Fong, Yuk-fai, and Jin Li. 2010. “Relational Contracts, Efficiency Wage, and
Employment Dynamics.” Unpublished.
[21] Fudenberg, Drew, Bengt Holmström, and Paul Milgrom. 1990. “ShortTerm Contracts and Long-Term Agency Relationships.” Journal of Economic
Theory 51 (1): 1-31.
[22] Garrett, Daniel, and Alessandro Pavan. 2012. “Managerial Turnover in a
Changing World.” Journal of Political Economy 120 (5): 879-925.
[23] Garrett, Daniel, and Alessandro Pavan. 2014. “Dynamic Managerial Compensation: On the Optimality of Seniority-based Schemes.”
http://faculty.wcas.northwestern.edu/∼apa522.
[24] Green, Edward. 1987. “Lending and the Smoothing of Uninsurable Income.”
Contractual arrangements for intertemporal trade 1: 3-25.
[25] Holmström, Bengt, and Paul Milgrom. 1987. “Aggregation and Linearity
in the Provision of Intertemporal Incentives.” Econometrica 55 (2): 303-328.
53
[26] Halac,
Marina,
Navin
Kartik,
and
Qingmin
Liu.
2013.
“Optimal
Contracts
for
Experimentation.”
http://www0.gsb.columbia.edu/faculty/mhalac/research.html.
[27] He, Zhiguo. 2009. “Optimal Executive Compensation when Firm Size Follows
Geometric Brownian Motion.” Review of Financial Studies 22 (2): 859-892.
[28] He, Zhiguo, Bin Wei, and Jianfeng Yu. 2014. “Optimal Long-term Contracting with Learning.” http://faculty.chicagobooth.edu/zhiguo.he/pubs.html.
[29] Hörner, Johannes, and Julian Jamison. 2007. “Collusion with (Almost) No
Information.” RAND Journal of Economics 38 (3): 804-822.
[30] Hörner, Johannes, and Larry Samuelson. 2013. “Incentives for Experimenting Agents.” https://sites.google.com/site/jo4horner.
[31] Jackson, Matthew O., and Hugo F. Sonnenschein. 2007. “Overcoming
Incentive Constraints by Linking Decisions.” Econometrica 75 (1): 241-257.
[32] Jovanovic, Boyan, and Julien Prat. 2014. “Dynamic Contracts when Agent’s
Quality is Unknown.” Theoretical Economics 9 (3): 865-914.
[33] Kwon, Suehyun. 2014. “Relational Contracts in a Persistent Environment.”
http://www.ucl.ac.uk/∼uctpskw.
[34] Laffont, Jean-Jacques, and Jean Tirole. 1988. “The Dynamics of Incentive
Contracts.” Econometrica 56 (5): 1153-1175.
[35] Malcomson, James M., and Frans Spinnewyn. 1988. “The Multiperiod
Principal-Agent Problem.” Review of Economic Studies 55 (3): 391-407.
[36] Manso, Gustavo. 2011. “Motivating Innovation.” Journal of Finance 66 (5):
1823-1860.
[37] Pavan, Alessandro, Ilya Segal, and Juuso Toikka. 2014. “Dynamic Mechanism Design: A Myersonian Approach.” Econometrica 82 (2): 601-653.
[38] Phelan, Christopher, and Robert M. Townsend. 1991. “Computing MultiPeriod, Information-Constrained Optima.” Review of Economic Studies 58 (5):
853-881.
54
[39] Radner, Roy. 1981. “Monitoring Cooperative Agreements in a Repeated
Principal-Agent Relationship.” Econometrica 49 (5): 1127-1148.
[40] Radner, Roy. 1985. “Repeated Principal-Agent Games with Discounting.”
Econometrica 53 (5): 1173-1198.
[41] Ray, Debraj. 2002. “The Time Structure of Self-Enforcing Agreements.” Econometrica 70 (2): 547-582.
[42] Rogerson, William P. 1985. “Repeated Moral Hazard.” Econometrica 53 (1):
69-76.
[43] Rubinstein, Ariel, and Menahem E. Yaari. 1983. “Repeated Insurance
Contracts and Moral Hazard.” Journal of Economic Theory 30 (1): 74-97.
[44] Sannikov, Yuliy. 2008. “A Continuous-Time Version of the Principal-Agent
Problem.” Review of Economic Studies 75 (3): 957-984.
[45] Sannikov, Yuliy. 2014. “Moral Hazard
http://www.princeton.edu/∼sannikov/
and
Long-Run
Incentives.”
[46] Shapiro, Carl, and Joseph E. Stiglitz. 1984. “Equilibrium Unemployment
as a Worker Discipline Device.” American Economic Review 74 (3): 433-444.
[47] Spear, Stephen E., and Sanjay Srivastava. 1987. “On Repeated Moral
Hazard with Discounting.” Review of Economic Studies 54 (4): 599-617.
[48] Strulovici, Bruno. 2011. “Contracts, Information Persistence, and Renegotiation.” http://faculty.wcas.northwestern.edu/∼bhs675/
[49] Tchistyi,
Alexei. 2013. “Security Design
den Cash Flows:
The Optimality of
http://faculty.haas.berkeley.edu/Tchistyi.
with Correlated HidPerformance Pricing.”
[50] Thomas, Jonathan P., and Tim Worrall. 1994. “Foreign Direct Investment
and the Risk of Expropriation.” Review of Economic Studies 61 (1): 81-108.
[51] Thomas, Jonathan P., and Tim Worrall. 2010. “Dynamic Relational Contracts with Credit Constraints.” The School of Economics Discussion Paper 1009.
55
[52] Townsend, Robert M. 1982. “Optimal Multiperiod Contracts and the Gain
from Enduring Relationships under Private Information.” Journal of Political
Economy 90 (6): 1166-1186.
[53] Williams, Noah. 2011. “Persistent Private Information.” Econometrica 79 (4):
1233-1275.
[54] Zhang, Yuzhe. 2009. “Dynamic Contracting with Persistent Shocks.” Journal
of Economic Theory 144 (2): 635675.
[55] Zhu, John Y. 2013. “Optimal Contracts with Shirking.” Review of Economic
Studies 80 (2): 812-839.
56