Reference: liebelt, Paul “ An Introduction to Optimal Estimation
advertisement

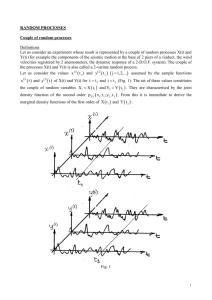
Gauss-Markov Theorem Theorem: If x is an n vector and y is an m vector of random variables with second moment matrices E[ xxT ] Cx E[ xyT ] Cxy (1) E[ yyT ] Cy where C y is positive definite. The linear minimum mean square estimate 1, x̂ , of x given the data, y , is xˆ C xy C y 1 y Note that the inverse of an (2) m m matrix (C y 1 ) is required. The associated error matrix Ce of the estimation error is Ce E[eeT ] E ( xˆ x)( xˆ x)T 1 1 E[(Cxy C y y x)(Cxy C y y x)T ] (4) 1 Cx Cxy C y C T xy In addition, if the following condition exists 1 E ( xˆ ) x Cxy C y E ( y) then (5) x̂ is the linear minimum variance unbiased estimate of x . The proof of the Gauss-Markov Theorem is straightforward. We wish to find the linear estimator xˆ Ay that minimizes (6) Ce Ce E[( xˆ x)( xˆ x)T ] E[( Ay x)( Ay x)T ] AE[ yyT ] AT E[ xxT ] AE[ yxT ] E[ xyT ] AT AC y AT Cx AC T xy Cxy AT 1 T The mean square error is given by e e where e is the estimation error, e xˆ x . 1 (7) Ce is found by taking the variation with respect to A The minimum of Ce 0 ACy AT ACT xy ACy AT Cxy AT A(Cy AT CT xy ) ( ACy Cxy ) AT 0 For arbitrary A (8) this requires that AC y C xy 0 or, A C xy C y 1 i.e. xˆ C xy C y 1 y For (9) x̂ to be unbiased 1 E ( xˆ ) x Cxy C y E ( y) ( 10 ) Some other properties of minimum mean square error linear estimators In two dimensions we expect x̂ to be the true value of x projected into the y plane. y3 x e y2 x̂ y1 The error vector ( e) n 1 is perpendicular to the measurement space defined by y i.e. e xˆ x To show this, multiply ( 11 ) e by y T and take the expected value ey T xˆy T xyT ˆ T ] E[ xyT ] E[eyT ] E[ xy ( 12 ) 2 But, 1 ˆ T ] E[Cxy C y yyT ] E[ xy ( 13 ) 1 C xy C y C y C xy Hence, E[eyT ] Cxy Cxy 0 ( 14 ) Also, this means that Cexˆ 0 i.e. ( 15 ) x̂ is orthogonal to e as seen in the figure. To demonstrate this we can show that E[exˆT ] 0 as follows: E[exˆT ] E[( xˆ x) xˆT ] ˆ ˆ T ] E[ xxˆ T ] E[ xx 1 1 1 Cxy C y E[ yy T ]C y C T xy E[ xy T ]C y C T xy 1 1 Cxy C y C T xy Cxy C y C T xy 0 Special Cases of the Gauss-Markov Theorem Assume that we have a linear observation/state relationship. Then y Hx where H is an ( 16 ) m n matrix. From equation (2) 1 xˆ Cxy C y y ( 17 ) We can compute C xy and C y , i.e. Cxy E[ xyT ] E[ x( Hx )T ] E[ xxT ]H T E[ x T ] ( 18 ) Cx H T Cx 3 and C y Cy E[ yyT ] E[( Hx )( Hx )T ] ( 19 ) HE[ xxT ]H T HE[ x T ] E[ xT ]H T E[ T ] HCx H T HCx C T x H T C Substituting into equation (17), the estimate for x̂ becomes xˆ (Cx H T Cx )( HCx H T HCx C T x H T C ) 1 y Using the expression for ( 20 ) Ce from the Gauss-Markov Theorem 1 Ce Cx Cxy C y C T xy Ce Cx (Cx H T Cx )( HCx H T HCx C T x H T C ) 1 (C x H T C x )T Note that in the case of linear observations we require knowledge of ( 21 ) C x , Cx and C in addition to the data y . The computation of these matrices can be a difficult task. Usually we would assume that C x is diagonal with large diagonal elements which implies nothing is known about the true state. If we know the joint density function, f ( x1 , x2 xn ) , then C x can be computed from its definition Cx xx If we know T f ( x1 , x2 xn )dx1 , dx2 dxn ( 22 ) COV ( x) E[( x x )( x x )T ] , where x is the mean of x , we can compute C x Cx COV ( x) xx T ( 23 ) As stated, we generally use a diagonal matrix with large numerical values for 4 Cx . If we have information on the joint density function, g , of the components of Cx x g ( x1 xn , 1 m )dx1 dxn d 1 d m ( 24 ) The second moment matrix, Ce T x and , then T Ce , is usually assumed known, where h(1 m ) d 1 d m ( 25 ) , are uncorrelated2, then If the state vector, x, and observation noise, Cx 0 and equation (20) for ( 26 ) x̂ and equation (21) Ce simplify to xˆ Cx H T ( HCx H T C ) 1 y ( 27 ) Note that this still requires an m m matrix inversion. This can be simplified by using Theorem 3 of the Matrix Inversion Theorems of Appendix B, i.e., BCT ( A CBCT )1 (CT A1C B1 )1 CT A1 (28 ) B Cx , C H , A C ( 29 ) Let then 1 1 Cx H T ( HCx H T C )1 (Cx H T C H )1 H T C 1 ( 30 ) and 1 1 1 xˆ ( H T C H Cx )1 H T C y which is the minimum variance estimate of matrix ( 31 ) x̂ derived in Section 4.4. Finally, the estimation error covariance Ce is 1 1 Ce ( H T C H Cx )1 ( 32 ) Reference: Liebelt, Paul “ An Introduction to Optimal Estimation” Addison-Wesley, 1967 2 This is the same assumption made for the minimum variance estimate. 5