PPT - How do I get a website?
advertisement

Bayes Rule
Rev. Thomas Bayes
(1702-1761)
• The product rule gives us two ways to factor a joint
probability:
P( A, B) P( A | B) P( B) P( B | A) P( A)
P( B | A) P( A)
• Therefore, P( A | B)
P( B)
• Why is this useful?
– Can get diagnostic probability P(Cavity | Toothache) from causal
probability P(Toothache | Cavity)
– Can update our beliefs based on evidence
– Key tool for probabilistic inference
Bayes Rule example
• Marie is getting married tomorrow, at an outdoor ceremony
in the desert. In recent years, it has rained only 5 days each
year (5/365 = 0.014). Unfortunately, the weatherman has
predicted rain for tomorrow. When it actually rains, the
weatherman correctly forecasts rain 90% of the time. When
it doesn't rain, he incorrectly forecasts rain 10% of the time.
What is the probability that it will rain on Marie's wedding?
Bayes Rule example
• Marie is getting married tomorrow, at an outdoor ceremony
in the desert. In recent years, it has rained only 5 days each
year (5/365 = 0.014). Unfortunately, the weatherman has
predicted rain for tomorrow. When it actually rains, the
weatherman correctly forecasts rain 90% of the time. When
it doesn't rain, he incorrectly forecasts rain 10% of the time.
What is the probability that it will rain on Marie's wedding?
P(Rain | Predict )
P(Predict | Rain ) P(Rain )
P(Predict )
P(Predict | Rain ) P(Rain )
P(Predict | Rain ) P(Rain ) P(Predict | Rain ) P(Rain )
0.9 0.014
0.0126
0.111
0.9 0.014 0.1 0.986 0.0126 0.0986
Bayes rule: Another example
• 1% of women at age forty who participate in routine
screening have breast cancer. 80% of women with
breast cancer will get positive mammographies.
9.6% of women without breast cancer will also get
positive mammographies. A woman in this age
group had a positive mammography in a routine
screening. What is the probability that she actually
has breast cancer?
P(Cancer | Positive)
P(Positive | Cancer) P(Cancer)
P(Positive)
P(Positive | Cancer) P(Cancer)
P(Positive | Cancer) P(Cancer) P(Positive | Cancer) P(Cancer)
0.8 0.01
0.008
0.0776
0.8 0.01 0.096 0.99 0.008 0.095
Independence
• Two events A and B are independent if and only if
P(A B) = P(A) P(B)
– In other words, P(A | B) = P(A) and P(B | A) = P(B)
– This is an important simplifying assumption for
modeling, e.g., Toothache and Weather can be
assumed to be independent
• Are two mutually exclusive events independent?
– No, but for mutually exclusive events we have
P(A B) = P(A) + P(B)
• Conditional independence: A and B are conditionally
independent given C iff P(A B | C) = P(A | C) P(B | C)
Conditional independence:
Example
• Toothache: boolean variable indicating whether the patient has a
toothache
• Cavity: boolean variable indicating whether the patient has a cavity
• Catch: whether the dentist’s probe catches in the cavity
• If the patient has a cavity, the probability that the probe catches in it
doesn't depend on whether he/she has a toothache
P(Catch | Toothache, Cavity) = P(Catch | Cavity)
• Therefore, Catch is conditionally independent of Toothache given Cavity
• Likewise, Toothache is conditionally independent of Catch given Cavity
P(Toothache | Catch, Cavity) = P(Toothache | Cavity)
• Equivalent statement:
P(Toothache, Catch | Cavity) = P(Toothache | Cavity) P(Catch | Cavity)
Conditional independence:
Example
• How many numbers do we need to represent the joint
probability table P(Toothache, Cavity, Catch)?
23 – 1 = 7 independent entries
• Write out the joint distribution using chain rule:
P(Toothache, Catch, Cavity)
= P(Cavity) P(Catch | Cavity) P(Toothache | Catch, Cavity)
= P(Cavity) P(Catch | Cavity) P(Toothache | Cavity)
• How many numbers do we need to represent these
distributions?
1 + 2 + 2 = 5 independent numbers
• In most cases, the use of conditional independence
reduces the size of the representation of the joint
distribution from exponential in n to linear in n
Probabilistic inference
• Suppose the agent has to make a decision about
the value of an unobserved query variable X given
some observed evidence variable(s) E = e
– Partially observable, stochastic, episodic environment
– Examples: X = {spam, not spam}, e = email message
X = {zebra, giraffe, hippo}, e = image features
• Bayes decision theory:
– The agent has a loss function, which is 0 if the value of
X is guessed correctly and 1 otherwise
– The estimate of X that minimizes expected loss is the one
that has the greatest posterior probability P(X = x | e)
– This is the Maximum a Posteriori (MAP) decision
MAP decision
• Value x of X that has the highest posterior
probability given the evidence E = e:
P( E e | X x) P( X x)
x* arg max x P( X x | E e)
P ( E e)
arg max x P( E e | X x) P( X x)
P( x | e) P(e | x) P( x)
posterior
likelihood
prior
• Maximum likelihood (ML) decision:
x* argmaxx P(e | x)
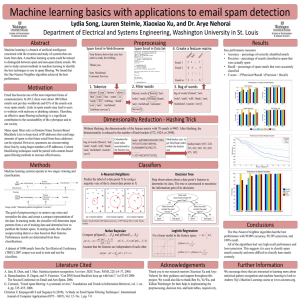
Naïve Bayes model
• Suppose we have many different types of observations
(symptoms, features) E1, …, En that we want to use to
obtain evidence about an underlying hypothesis X
• MAP decision involves estimating
P( X | E1 , , En ) P( E1 , , En | X ) P( X )
– If each feature Fi can take on k values, how many entries are in
the (conditional) joint probability table P(E1, …, En |X = x)?
Naïve Bayes model
• Suppose we have many different types of observations
(symptoms, features) E1, …, En that we want to use to
obtain evidence about an underlying hypothesis X
• MAP decision involves estimating
P( X | E1 , , En ) P( E1 , , En | X ) P( X )
• We can make the simplifying assumption that the
different features are conditionally independent
given the hypothesis:
n
P( E1 , , En | X ) P( Ei | X )
i 1
– If each feature can take on k values, what is the complexity of
storing the resulting distributions?
Naïve Bayes Spam Filter
• MAP decision: to minimize the probability of error, we should
classify a message as spam if
P(spam | message) > P(¬spam | message)
Naïve Bayes Spam Filter
• MAP decision: to minimize the probability of error, we should
classify a message as spam if
P(spam | message) > P(¬spam | message)
• We have P(spam | message) P(message | spam)P(spam)
and ¬P(spam | message) P(message | ¬spam)P(¬spam)
Naïve Bayes Spam Filter
• We need to find P(message | spam) P(spam) and
P(message | ¬spam) P(¬spam)
• The message is a sequence of words (w1, …, wn)
• Bag of words representation
– The order of the words in the message is not important
– Each word is conditionally independent of the others given
message class (spam or not spam)
Naïve Bayes Spam Filter
• We need to find P(message | spam) P(spam) and
P(message | ¬spam) P(¬spam)
• The message is a sequence of words (w1, …, wn)
• Bag of words representation
– The order of the words in the message is not important
– Each word is conditionally independent of the others given
message class (spam or not spam)
n
P(m essage| spam) P(w1 ,, wn | spam) P( wi | spam)
i 1
• Our filter will classify the message as spam if
n
n
i 1
i 1
P( spam) P( wi | spam) P(spam) P( wi | spam)
Bag of words illustration
US Presidential Speeches Tag Cloud
http://chir.ag/projects/preztags/
Bag of words illustration
US Presidential Speeches Tag Cloud
http://chir.ag/projects/preztags/
Bag of words illustration
US Presidential Speeches Tag Cloud
http://chir.ag/projects/preztags/
Naïve Bayes Spam Filter
n
P( spam| w1 ,, wn ) P( spam) P( wi | spam)
i 1
posterior
prior
likelihood
Parameter estimation
• In order to classify a message, we need to know the prior
P(spam) and the likelihoods P(word | spam) and
P(word | ¬spam)
– These are the parameters of the probabilistic model
– How do we obtain the values of these parameters?
prior
spam:
¬spam:
0.33
0.67
P(word | spam)
P(word | ¬spam)
Parameter estimation
• How do we obtain the prior P(spam) and the likelihoods
P(word | spam) and P(word | ¬spam)?
– Empirically: use training data
# of word occurrences in spam messages
P(word | spam) =
total # of words in spam messages
– This is the maximum likelihood (ML) estimate, or estimate
that maximizes the likelihood of the training data:
D
nd
P(w
d ,i
| classd ,i )
d 1 i 1
d: index of training document, i: index of a word
Parameter estimation
• How do we obtain the prior P(spam) and the likelihoods
P(word | spam) and P(word | ¬spam)?
– Empirically: use training data
# of word occurrences in spam messages
P(word | spam) =
total # of words in spam messages
• Parameter smoothing: dealing with words that were never
seen or seen too few times
– Laplacian smoothing: pretend you have seen every vocabulary word
one more time than you actually did
# of word occurrences in spam messages + 1
P(word | spam) =
total # of words in spam messages + V
(V: total number of unique words)
Summary of model and parameters
• Naïve Bayes model:
n
P( spam| m essage) P( spam) P( wi | spam)
i 1
n
P(spam| m essage) P(spam) P( wi | spam)
i 1
• Model parameters:
Likelihood
of spam
Likelihood
of ¬spam
P(w1 | spam)
P(w1 | ¬spam)
P(spam)
P(w2 | spam)
P(w2 | ¬spam)
P(¬spam)
…
…
P(wn | spam)
P(wn | ¬spam)
prior
Bag-of-word models for images
Csurka et al. (2004), Willamowski et al. (2005), Grauman & Darrell (2005), Sivic et al. (2003, 2005)
Bag-of-word models for images
1. Extract image features
Bag-of-word models for images
1. Extract image features
Bag-of-word models for images
1. Extract image features
2. Learn “visual vocabulary”
Bag-of-word models for images
1. Extract image features
2. Learn “visual vocabulary”
3. Map image features to visual words
Bayesian decision making:
Summary
• Suppose the agent has to make decisions about
the value of an unobserved query variable X
based on the values of an observed evidence
variable E
• Inference problem: given some evidence E = e,
what is P(X | e)?
• Learning problem: estimate the parameters of
the probabilistic model P(X | E) given a training
sample {(x1,e1), …, (xn,en)}