Chapter 7 Polynomial Regression Models
advertisement

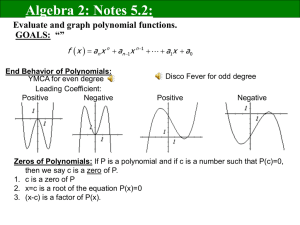
Chapter 7 Polynomial Regression Models Ray-Bing Chen Institute of Statistics National University of Kaohsiung 1 7.1 Introdution • The linear regression model y = X + is a general model for fitting any relationship that is linear in the unknown parameter . • Polynomial regression model: 2 7.2 Polynomial Models in One Variable 7.2.1 Basic Principles • A second-order model (quadratic model): 3 4 • • • Polynomial models are useful in situations where the analyst knows that curvilinear effects are present in the true response function. Polynomial models are also useful as approximating functions to unknown and possible very complex nonlinear relationship. Polynomial model is the Taylor series expansion of the unknown function. 5 • Several important conditions: – Order of the model: The order (k) should be as low as possible. The high-order polynomials (k > 2) should be avoided unless they can be justified for reasons outside the data. In an extreme case it is always possible to pass a polynomial of order n1 through n point so that a polynomial of sufficiently high degree can always be found that provides a “good” fit to the data. – Model Building Strategy: Various strategies for choosing the order of an approximating polynomial have been suggested. Two procedures: forward selection and backward elimination. 6 • Extrapolation: Extrapolation with polynomial models can be extreme hazardous. (see Figure 7.2) • Ill-Conditioning I: The X’X matrix becomes illconditioned as the order increases. It means that the matrix inversion calculations will be inaccurate, and considerable error may be introduced into the parameter estimates. • Ill-Conditioning II: If the values of x are limited to a narrow range, there can be significant illconditioning or multicollinearity in the columns of X. 7 8 • Hierarchy: The regression model is said to be hierarchical because it contains all terms of order three and lower. Only hierarchical models are invariant under linear transformation. Example 7.1 The Hardwood Data: • The strength of kraft paper (y) v.s. the % of hardwood. • Data in Table 7.1 • A scatter plot in Figure 7.3 9 10 11 12 13 14 15 7.2.2 Piecewise Polynomial Fitting (Splines) • Sometimes a low-order polynomial provides a poor fit to the data. But increasing the order of the polynomial modestly does not substantially improve the situation. • This problem may occur when the function behaves differently in different parts of the range of x. • A usual approach is to divide the range of x into segments and fit an appropriate curve in each segment. • Spline functions offer a useful way to perform this type of piecewise polynomial fitting. 16 • Splines are piecewise polynomials of order k. • The joint points of the pieces are usually called knots. • Generally the function values and the first k-1 derivatives agree at the knots. That is slpine is a continuous function with k-1 continues derivatives. • Cubic Spline: 17 • It is not simple to decide the number and position of the knots and the order of the polynomial in each segment. • Wold (1974) suggests – there should be as few knots as possible, with at least four or five data points per segment. – There should be no more than one extreme point and one point of inflexion per segment. • The great flexibility of spline functions makes it very easy to overfit the data. 18 • Cubic slpine model with h knots and no continuous restriction: • The fewer continuity restrictions required, the better if the fit. • The more continuity restrictions required, the worse is the fit but smoother the final curve will be. 19 • • 20 • X’X becomes ill-conditioned if there is a large number of knots. • Use a different representation of the slpine: cubic B-spline. 21 Example 7.2 Voltage Drop Data • The battery voltage drop in a guided missile motor observed over the time of missile flight is shown in Table 7.3. • The Scatter-plot is in Figure 7.6 • Model the data with a cubic slpine using two knots at 6.5 and 13. 22 23 • The ANOVA • A plot of the residual v.s. the fitted values and a normal probability plot of the residuals are in Figure 7.7 and Figure 7.8 24 25 26 27 28 Example 7.3 Piecewise Linear Regression • An important special case of practical interest fitting piecewise linear regression models. • This can be treated easily using linear splines. 29 30 • 31 7.2.3 Polynomial and Trigonometric Terms • Sometimes consider the models as the combination of polynomial and trigonometric terms. • From the scatter-plot, there may be some periodicity or cyclic behavior in the data. • A model with fewer terms may result than if only polynomial terms are employed. • The model 32 • If the regressor x is equally spaced, then the pairs of terms sin(jx) and cos(jx) are orthogonal. • Even without exactly equal spacing, the correlation between these terms will usually be quite small. • In Example 7.2 – Rescale the regressor x so that all of the observations are in the interval (0, 2). – Fit the model with d = 2 and r = 1 – R2 = 0.9895 and MSRes = 0.0767 33 7.3 Nonparamteric Regression • Nonparameter regression is closed related to the piecewise polynomial regression. • Develop a model free basis for predicting the response over the range of the data. 34 7.3.1 Kernel Regression • The kernel smoother: use a weighted average of the data. • where S=[wij] is the smoothing matrix. • Typically, the weights are chosen such that wij 0 for all yi’s outside of s defined “neighborhood” of the specific location of interest. 35 • These kernel smoothers use a bandwidth, b, to define this neighborhood of interest. • A large value for b results in more of the data being used to predict the response at the specific location. • The resulting plot of predicted values becomes much smoother as b increases. • As b decrease, less of the data are used to generate the prediction, and the resulting plot looks more wiggly or bumpy. 36 • This approach is called a kernel smoother. • A kernel function: • See Table 7.5 37 7.3.2 Locally Weighted Regression (Loess) • Another nonparameteric method • Loess also uses the data from a neighborhood around the specific location. • The neighborhood is defined as the span, which is the fraction of the total points used to form neighborhoods. • A span 0.5 indicates that the closest half of the total data points is used as the neighborhood. • Then loess procedure uses the points in the neighborhood to generate a weighted least-squares estimate of the specific response. 38 • The weights are based on the distance of the points used in the estimation from the specific location of interest. • Let x0 be the specific location of interest, and let Δ(x0) be the distance the farthest point in the neighborhood lies from the specific location of interest. • The tri-cube weighted function is 39 • The model • • Since 40 • A common estimate of variance is • R2 = (SST – SSRes) / SST 41 Example 7.4 Applying Loess Regression to the Windmill Data 42 43 44 45 46 47 7.3.3 Final Cautions • Parametric models are guided by appropriate subject area theory. • Nonparametric models almost always reflect pure empiricism. • One should always prefer a simple parametric model when it provides a reasonable and satisfactory fit to the data. • The model terms often have important interpretations. • One should prefer the parametric model, especially when subject area theory supports the transformation used. 48 • On the other hand, there are many situations where no simple parametric model yields an adequate or satisfactory fit to the data, where there is little or no subject area theory to guide the analyst, and where no simple transformation appears appropriate. • In such cases, nonparametric regression makes a great deal of sense. • One is willing to accept the relative complexity and the “black box” nature of the estimation in order to give an adequate fit to the data. 49 7.4 Polynomial Models in Two or More Variables • 50 51 • Response surface methodology (RSM) is widely applied in industry for modeling the output response(s) of a process in terms of the important controllable variables and then finding the operating conditions that optimize the response. • Illustrate fitting a second-order response surface in two variables. – y : the percent conversion of a chemical process – T : reaction temperature – C : reaction concentration • Figure 7.14 shows a central composite design. 52 • Second-order model: • See p.246 • The fitted model is 2 2 yˆ 79 . 75 9 . 83 x1 4 . 22 x 2 8 . 88 x1 5 . 13 x 2 7 . 75 x1 x 2 • The ANOVA table 53 54 • R2 and adjusted R2 values for this model are satisfactory. 55 56 57 58 59 60 • From the response surface plots, the maximum percent conversion occurs at about 245°C and 20% concentration. • The experimenter is interested in predicting the response y pr estimating the mean response at a particular point in the process variable space. 61 62 7.5 Orthogonal Polynomial • In fitting polynomial model in one variable, even if nonessential ill-conditioning is removed by centering, we may still have high levels of multicollinearity. 63 64 • Suppose the model is, y i 0 P0 ( x i ) 1 P1 ( x i ) k Pk ( x i ) i • Then X’X is n i 1 X'X 2 0 0 0 P ( xi ) n 0 • The estimators are ˆ 0 i 1 n P (x ) y j i 0 0 2 Pk ( x i ) i i 1 n i 1 2 Pj ( xi ) 65 66 Example 7.5 Orthogonal Polynomial • The effect of various reorder quantities on the average annual cost of the inventory. 67 68 • The fitted equation is 2 2 x 162 . 5 1 x 162 . 5 10 1 yˆ 324 . 30 0 . 7424 ( 2 )( ) 2 . 7955 25 2 25 12 69