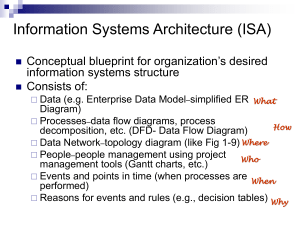
A Plea for Adaptive Data Analysis
advertisement

A Plea for Adaptive Data Analysis:
Instantaneous Frequencies and Trends
For Nonstationary Nonlinear Data
Norden E. Huang
Research Center for Adaptive Data Analysis
National Central University
Zhongli, Taiwan, China
Hot Topic Conference, 2011
Instantaneous Frequencies and Trends
For Nonstationary Nonlinear Data
In search of frequency
I found the trend and other information
Prevailing Views on
Instantaneous Frequency
The term, Instantaneous Frequency, should be banished
forever from the dictionary of the communication engineer.
J. Shekel, 1953
The uncertainty principle makes the concept of an
Instantaneous Frequency impossible.
K. Gröchennig, 2001
How to define frequency?
It seems to be trivial.
But frequency is an important parameter for
us to understand many physical phenomena.
Definition of Frequency
Given the period of a wave as T ; the frequency is
defined as
1
T
.
Traditional Definition of Frequency
• frequency = 1/period.
•
•
•
•
•
Definition too crude
Only work for simple sinusoidal waves
Does not apply to nonstationary processes
Does not work for nonlinear processes
Does not satisfy the need for wave equations
The Idea and the need of Instantaneous
Frequency
According to the classic wave theory, the wave
conservation law is based on a gradually changing φ(x,t)
such that
k ,
;
t
k
0 .
t
Therefore, both wave number and frequency must have
instantaneous values and differentiable.
Instantaneous Frequency
Velocity
distance
; mean velocity
time
Newton v
Frequency
dx
dt
1
; mean frequency
period
HHT defines the phase function
d
dt
So that both v and can appear in differential equations.
Hilbert Transform : Definition
For any x( t ) Lp ,
y( t )
1
x( )
d ,
t
then, x( t )and y( t ) form the analytic pairs:
z( t ) x( t ) i y( t ) a( t ) e i ( t ) ,
where
a( t ) x 2 y 2 1 / 2 and ( t ) tan 1
y( t )
.
x( t )
The Traditional View of the Hilbert
Transform for Data Analysis
Traditional View
a la Hahn (1995) : Data LOD
Traditional View
a la Hahn (1995) : Hilbert
Traditional Approach
a la Hahn (1995) : Phase Angle
Traditional Approach
a la Hahn (1995) : Phase Angle Details
Traditional Approach
a la Hahn (1995) : Frequency
Why the traditional approach
does not work?
Hilbert Transform a cos + b :
Data
Hilbert Transform a cos + b :
Phase Diagram
Hilbert Transform a cos + b :
Phase Angle Details
Hilbert Transform a cos + b :
Frequency
The Empirical Mode Decomposition
Method and Hilbert Spectral Analysis
Sifting
Empirical Mode Decomposition:
Methodology : Test Data
Empirical Mode Decomposition:
Methodology : data and m1
Empirical Mode Decomposition:
Methodology : data & h1
Empirical Mode Decomposition:
Methodology : h1 & m2
Empirical Mode Decomposition:
Methodology : h3 & m4
Empirical Mode Decomposition:
Methodology : h4 & m5
Empirical Mode Decomposition
Sifting : to get one IMF component
x( t ) m 1 h1 ,
h1 m 2 h2 ,
.....
.....
hk 1 m k hk .
hk c1
.
The Stoppage Criteria
The Cauchy type criterion: when SD is small than a preset value, where
T
SD
h
t 0
k 1
( t ) hk ( t )
2
T
2
h
k 1 ( t )
t 0
Or, simply pre-determine the number of iterations.
Effects of Sifting
• To remove ridding waves
• To reduce amplitude variations
• The systematic study of the stoppage
criteria leads to the conjecture connecting
EMD and Fourier Expansion.
Empirical Mode Decomposition:
Methodology : IMF c1
Definition of the Intrinsic Mode Function
(IMF): a necessary condition only!
Any function having the same numbers of
zero cros sin gs and extrema ,and also having
symmetric envelopes defined by local max ima
and min ima respectively is defined as an
Intrinsic Mode Function ( IMF ).
All IMF enjoys good Hilbert Transform :
c( t ) a( t )e i ( t )
Empirical Mode Decomposition:
Methodology : data, r1 and m1
Empirical Mode Decomposition
Sifting : to get all the IMF components
x( t ) c1 r1 ,
r1 c2 r2 ,
. . .
rn 1 cn rn .
x( t )
n
c
j1
j
rn .
Definition of Instantaneous Frequency
The Fourier Transform of the Instrinsic Mode
Funnction, c( t ), gives
W ( )
i ( t )
a(
t
)
e
dt
t
By Stationary phase approximation we have
d ( t )
,
dt
This is defined as the Ins tan tan eous Frequency .
An Example of Sifting
&
Time-Frequency Analysis
Length Of Day Data
LOD
:
IMF
Orthogonality Check
•
Pair-wise %
•
Overall %
•
•
•
•
•
•
•
•
•
•
•
0.0003
0.0001
0.0215
0.0117
0.0022
0.0031
0.0026
0.0083
0.0042
0.0369
0.0400
•
0.0452
LOD : Data & c12
LOD
: Data & Sum c11-12
LOD : Data & sum c10-12
LOD : Data & c9 - 12
LOD : Data & c8 - 12
LOD
: Detailed Data and Sum c8-c12
LOD : Data & c7 - 12
LOD
: Detail Data and Sum IMF c7-c12
LOD
: Difference Data – sum all IMFs
Properties of EMD Basis
The Adaptive Basis based on and derived from
the data by the empirical method satisfy nearly
all the traditional requirements for basis
empirically and a posteriori:
Complete
Convergent
Orthogonal
Unique
The combination of Hilbert Spectral Analysis and
Empirical Mode Decomposition has been
designated by NASA as
HHT
(HHT vs. FFT)
Comparison between FFT and HHT
1. FFT :
x( t )
aj e
i jt
.
j
2. HHT :
x( t ) a j ( t ) e
j
i
j (
t
)d
.
Comparisons:
Fourier, Hilbert & Wavelet
Speech Analysis
Hello : Data
Four comparsions D
Traditional View
a la Hahn (1995) : Hilbert
Mean Annual Cycle & Envelope: 9 CEI
Cases
Mean Hilbert Spectrum : All CEs
For
For quantifying nonlinearity we need
instantaneous frequency.
How to define Nonlinearity?
How to quantify it through data alone?
The term, ‘Nonlinearity,’ has been
loosely used, most of the time, simply
as a fig leaf to cover our ignorance.
Can we be more precise?
How is nonlinearity defined?
Based on Linear Algebra: nonlinearity is defined based
on input vs. output.
But in reality, such an approach is not practical: natural
system are not clearly defined; inputs and out puts are
hard to ascertain and quantify. Furthermore, without
the governing equations, the order of nonlinearity is not
known.
In the autonomous systems the results could depend
on initial conditions rather than the magnitude of the
‘inputs.’
The small parameter criteria could be misleading:
sometimes, the smaller the parameter, the more
nonlinear.
Linear Systems
Linear systems satisfy the properties of superposition
and scaling. Given two valid inputs to a system H,
x1 ( t ) and x2 ( t )
as well as their respective outputs
y1 ( t ) H{ x1 ( t )} and
y2 (t) = H{ x2 ( t )}
then a linear system, H, must satisfy
y1 ( t ) y1 ( t ) H{ x1 ( t ) x2 ( t )}
for any scalar values α and β.
How is nonlinearity defined?
Based on Linear Algebra: nonlinearity is defined based
on input vs. output.
But in reality, such an approach is not practical: natural
system are not clearly defined; inputs and out puts are
hard to ascertain and quantify. Furthermore, without
the governing equations, the order of nonlinearity is not
known.
In the autonomous systems the results could depend
on initial conditions rather than the magnitude of the
‘inputs.’
The small parameter criteria could be misleading:
sometimes, the smaller the parameter, the more
nonlinear.
How should nonlinearity be
defined?
The alternative is to define nonlinearity based
on data characteristics: Intra-wave frequency
modulation.
Intra-wave frequency modulation is known as
the harmonic distortion of the wave forms. But
it could be better measured through the
deviation of the instantaneous frequency from
the mean frequency (based on the zero
crossing period).
Characteristics of Data from
Nonlinear Processes
d2 x
3
x
x
cos t
2
dt
d2 x
x
2
dt
1x
2
cos t
Spring with position dependent cons tan t ,
int ra wave frequency mod ulation;
therefore , we need ins tan tan eous frequency.
Duffing Pendulum
x
d2x
2
x
(
1
x
) cos t .
2
dt
Duffing Equation : Data
Hilbert’s View on Nonlinear Data
Intra-wave Frequency Modulation
A simple mathematical model
x( t ) cos t sin2t
Duffing Type Wave
Data: x = cos(wt+0.3 sin2wt)
Duffing Type Wave
Perturbation Expansion
For 1 , we can have
x( t ) cos t sin 2 t
cos t cos sin 2 t sin t sin sin 2 t
cos t sin t sin 2 t ....
1 cos t cos 3 t ....
2
2
This is very similar to the solution of Duffing equation .
Duffing Type Wave
Wavelet Spectrum
Duffing Type Wave
Hilbert Spectrum
Degree of nonlinearity
Let us consider a generalized intra-wave frequency modulation model
as:
d
x( t ) cos( t sin t ) IF= 1 cos t
dt
IF IFz
DN (Degree of Nolinearity ) should be
IFz
2
1/ 2
.
2
Depending on the value of , we can have either a up-down symmetric
or a asymmetric wave form.
Degree of Nonlinearity
• DN is determined by the combination of δη precisely
with Hilbert Spectral Analysis. Either of them equals zero
means linearity.
• We can determine δ and η separately:
– η can be determined from the instantaneous
frequency modulations relative to the mean frequency.
– δ can be determined from DN with known η.
NB: from any IMF, the value of δη cannot be greater
than 1.
• The combination of δ and η gives us not only the Degree of
Nonlinearity, but also some indications of the basic
properties of the controlling Differential Equation, the Order
of Nonlinearity.
Stokes Models
d2x
2
2
x x cos t with
; =0.1.
2
dt
25
Stokes I: is positive ranging from 0.1 to 0.375;
beyond 0.375, there is no solution.
Stokes II: is negative ranging from 0.1 to 0.391;
beyond 0.391, there is no solution.
Data and IFs : C1
Stokes Model c1: e=0.375; DN=0.2959
2
1.5
1
Frequency : Hz
0.5
0
-0.5
-1
-1.5
-2
IFq
IFz
Data
IFq-IFz
-2.5
-3
0
20
40
60
80
100
120
Time: Second
140
160
180
200
Summary Stokes I
Summary Stokes I
0.35
C1
C2
CDN
Combined Degree of Stationarity
0.3
0.25
0.2
0.15
0.1
0.05
0
0.1
0.15
0.2
0.25
0.3
Epsilon
0.35
0.4
0.45
Lorenz Model
• Lorenz is highly nonlinear; it is the model
equation that initiated chaotic studies.
• Again it has three parameters. We
decided to fix two and varying only one.
• There is no small perturbation parameter.
• We will present the results for ρ=28, the
classic chaotic case.
Phase Diagram for ro=28
Lorenz Phase : ro=28, sig=10, b=8/3
30
20
z
10
0
-10
-20
-30
20
10
50
40
0
30
20
-10
y
10
-20
0
x
X-Component
DN1=0.5147
CDN=0.5027
Data and IF
Lorenz X : ro=28, sig=10, b=8/3
50
IFq
IFz
Data
IFq-IFz
40
Frequency : Hz
30
20
10
0
-10
0
5
10
15
20
25
30
Time : second
35
40
45
50
Spectra data and IF
10
Spectra of Data and IF : Lorenz 28
2
Data
Frequency
10
Spectral Density
10
10
10
10
10
1
0
-1
-2
-3
-4
-1
10
0
10
10
Frequency : Hz
1
10
2
Comparisons
Fourier
Wavelet
Hilbert
Basis
a priori
a priori
Adaptive
Frequency
Integral transform:
Global
Integral transform:
Regional
Differentiation:
Local
Presentation
Energy-frequency
Energy-timefrequency
Energy-timefrequency
Nonlinear
no
no
yes, quantifying
Non-stationary
no
yes
Yes, quantifying
Uncertainty
yes
yes
no
Harmonics
yes
yes
no
How to define Trend ?
Parametric or Non-parametric?
Intrinsic vs. extrinsic approach?
The State-of-the arts: Trend
“One economist’s trend is another
economist’s cycle”
Watson : Engle, R. F. and Granger, C. W. J. 1991 Long-run Economic
Relationships. Cambridge University Press.
Philosophical Problem Anticipated
名不正則言不順
言不順則事不成
——孔夫子
On Definition
Without a proper definition,
logic discourse would be impossible.
Without logic discourse,
nothing can be accomplished.
Confucius
Definition of the Trend
Within the given data span, the trend is an intrinsically
fitted monotonic function, or a function in which there
can be at most one extremum.
The trend should be an intrinsic and local property of the data; it is
determined by the same mechanisms that generate the data.
Being local, it has to associate with a local length scale, and be valid only
within that length span, and be part of a full wave length.
The method determining the trend should be intrinsic. Being intrinsic,
the method for defining the trend has to be adaptive.
All traditional trend determination methods are extrinsic.
Algorithm for Trend
• Trend should be defined neither
parametrically nor non-parametrically.
• It should be the residual obtained by
removing cycles of all time scales from the
data intrinsically.
• Through EMD.
Global Temperature Anomaly
Annual Data from 1856 to 2003
Global Temperature Anomaly 1856 to 2003
IMF Mean of 10 Sifts : CC(1000, I)
Mean IMF
STD IMF
Statistical Significance Test
Data and Trend C6
Rate of Change Overall Trends : EMD and Linear
Conclusion
• With EMD, we can define the true instantaneous
frequency and extract trend from any data.
• We can also talk about nonlinearity quantitatively.
• Among other applications, the degree of nonlinearity
could be used to set an objective criterion in structural
health monitoring and to quantify the degree of
nonlinearity in natural phenomena; the trend could be
used in financial as well as natural sciences.
• These are all possible because of adaptive data analysis
method.
The Job of a Scientist
The job of a scientist is to listen carefully to
nature, not to tell nature how to behave.
Richard Feynman
To listen is to use adaptive method and let the data sing, and
not to force the data to fit preconceived modes.
All these results depends on adaptive approach.
Thanks
What This Means
• EMD separates scales in physical space; it generates
an extremely sparse representation for any given data.
• Added noises help to make the decomposition more
robust with uniform scale separations.
• Instantaneous Frequency offers a total different view for
nonlinear data: instantaneous frequency needs no
harmonics and is unlimited by uncertainty principle.
• Adaptive basis is indispensable for nonstationary and
nonlinear data analysis
• EMD establishes a new paradigm of data analysis
Outstanding Mathematical Problems
1. Mathematic rigor on everything we do. (tighten the
definitions of IMF,….)
2. Adaptive data analysis (no a priori basis methodology
in general)
3. Prediction problem for nonstationary processes
(end effects)
4. Optimization problem (the best stoppage criterion and
the uniqueness of the decomposition)
5. Convergence problem (best spline implement,
and 2-D)
Conclusion
Adaptive method is the only scientifically meaningful way
to analyze nonlinear and nonstationary data.
It is the only way to find out the underlying physical
processes; therefore, it is indispensable in scientific
research.
EMD is adaptive; It is physical, direct, and simple.
But, we have a lot of problems
And need a lot of helps!
Up Hill
Does the road wind up-hill all the way?
Yes, to the very end.
Will the day’s journey take the whole long day?
From morn to night, my friend.
--- Christina Georgina Rossetti
A less poetic paraphrase
• There is no doubt that our road will be long
and that our climb will be steep.
……
• But, anything is possible.
---
Barack Obama
18 Jan 2009, Lincoln Memorial
History of HHT
1998: The Empirical Mode Decomposition Method and the
Hilbert Spectrum for Non-stationary Time Series Analysis,
Proc. Roy. Soc. London, A454, 903-995. The invention of
the basic method of EMD, and Hilbert transform for
determining the Instantaneous Frequency and energy.
1999: A New View of Nonlinear Water Waves – The Hilbert
Spectrum, Ann. Rev. Fluid Mech. 31, 417-457.
Introduction of the intermittence in decomposition.
2003: A confidence Limit for the Empirical mode
decomposition and the Hilbert spectral analysis, Proc. of
Roy. Soc. London, A459, 2317-2345.
Establishment of a confidence limit without the ergodic
assumption.
2004: A Study of the Characteristics of White Noise Using the
Empirical Mode Decomposition Method, Proc. Roy. Soc.
London, A460, 1179-1611.
Defined statistical significance and predictability.
Recent Developments in HHT
2007: On the trend, detrending, and variability of nonlinear and
nonstationary time series. Proc. Natl. Acad. Sci., 104,
14,889-14,894.
The correct adaptive trend determination method
2009: On Ensemble Empirical Mode Decomposition.
Advances in Adaptive Data Analysis. Advances in Adaptive
data Analysis, 1, 1-41
2009: On instantaneous Frequency. Advances in Adaptive
Data Analysis , 2, 177-229.
2010: Multi-Dimensional Ensemble Empirical Mode
Decomposition. Advances in Adaptive Data Analysis 3, 339372.
2011: Degree of Nonlinearity. Patent and Paper