Lecture (Feb 18)
advertisement
")
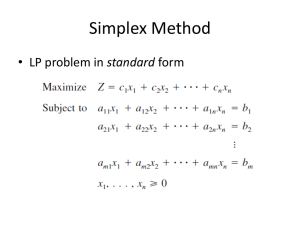
Water Resources Development and Management Optimization (Linear Programming) CVEN 5393 Feb 18, 2013 Acknowledgements • Dr. Yicheng Wang (Visiting Researcher, CADSWES during Fall 2009 – early Spring 2010) for slides from his Optimization course during Fall 2009 • Introduction to Operations Research by Hillier and Lieberman, McGraw Hill How to Solve LP Problems • Graphical Solution • Simplex Method for Standard form LP – Geometric Concepts – Setting up and Algebra – Algebraic solution of Simplex • R-Resources Prototype Model from Hillier and Lieberman The Wyndor Glass Co. produces high-quality glass products, including windows and glass doors. It has three plants. Plant 1 produces Aluminum frames Plant 2 produces wood frames Plant 3 produces the glass and assembles the products. The company has decided to produce two new products. Product 1: An 8-foot glass door with aluminum framing Product 2: A 4x6 foot double-hung wood framed window Each product will be produced in batches of 20. The production rate is defined as the number of batches produced per week. The company wants to know what the production rate should be in order to maximize their total profit, subject to the restriction imposed by the limited production capacities available in the 3 plants. To get the answer, we need to collect the following data. (a) Number of hours of production time available per week in each plant for these two new products. (Most of the time in the 3 plants is already committed to current products, so the available capacity for the 2 new products is quite limited). Number of hours of production time available per week in Plant 1 for the new products: 4 Number of hours of production time available per week in Plant 2 for the new products: 12 Number of hours of production time available per week in Plant 3 for the new products: 18 (b) Number of hours of production time used in each plant for each batch produced of each new product (Product 1 requires some of the production capacity in Plants 1 and 3, but none in Plant 2. Product 2 needs only Plants 2 and 3). Number of hours of production time used in Plant 1 for each batch produced of Product 1: 1 Number of hours of production time used in Plant 2 for each batch produced of Product 1: 0 Number of hours of production time used in Plant 3 for each batch produced of Product 1: 3 Number of hours of production time used in Plant 1 for each batch produced of Product 2: 0 Number of hours of production time used in Plant 2 for each batch produced of Product 2: 2 Number of hours of production time used in Plant 3 for each batch produced of Product 2: 2 (c) Profit per batch produced of each new product. Profit per batch produced of Product 1: $3,000 Profit per batch produced of Product 2: $5,000 The data collected are summarized in Table 3.1. This is a linear programming problem of the classic product mix type. Formulation as a Linear Programming Problem To formulate the LP model for this problem, let x1 = number of batches of product 1 produced per week x2 = number of batches of product 2 produced per week Z = total profit ( in thousands of dollars) from producing the two new products. Thus, x1 and x2 are the decision variables for the model. Using the data of Table 3.1, we obtain (Plant 1:Total production time required) (Production time available) (Plant 2:Total production time required) (Production time available) (Plant 3:Total production time required) (Production time available) (4) Graphical Solution The Wyndor Glass Co. example is used to illustrate the graphical solution. Fig. 3.1 Shaded area shows values of (x1, x2) allowed by x1 ≥ 0, x2 ≥ 0, x1 ≤ 4 Fig. 3.2 Shaded area shows values of (x1, x2) , called feasible region Fig. 3.3 The value of (x1, x2) that maximize 3x1 + 5x2 is (2, 6) Common Terminology for LP Model Objective Function: The function being maximized or minimized is called the objective function. Constraint: The restrictions of LP Model are referred to as constraints. The first m constraints in the previous model are sometimes called functional constraints. The restrictions xj >= 0 are called nonnegativity constraints. Feasible Solution: A feasible solution is a solution for which all the constraints are satisfied. Infeasible Solution: An infeasible solution is a solution for which at least one constraint is violated. Feasible Region: The feasible region is the collection of all feasible solutions. A feasible solution is located in the feasible region. An infeasible solution is outside the feasible region. Common Terminology for LP Model No Feasible Solutions: It is possible for a problem to have no feasible solutions. An Example Fig. 3.4 The Wyndor Glass Co. problem would have no feasible solutions if the constraint 3x1 + 5x2 ≤ 50 were added to the problem. In this case, there is no feasible region Common Terminology for LP Model Optimal Solution: An optimal solution is a feasible solution that has the maximum or minimum of the objective function. Multiple Optimal Solutions: It is possible to have more than one optimal solution. An Example Fig. 3.5 The Wyndor Glass Co. problem would have multiple optimal solutions if the objective function were changed to Z = 3x1 + 2x2 Common Terminology for LP Model Unbounded Objective: If the constraints do not prevent improving the value of the objective function indefinitely in the favorable direction, the LP model is called having an unbounded objective. An Example Fig. 3.6 The Wyndor Glass Co. problem would have no optimal solutions if the only functional constrait were x1 ≤ 4, because x2 then could be increased indefinitely in the feasible region without ever reaching the maximum value of Z = 3x1 + 2x2 Common Terminology for LP Model Corner-Point Feasible (CPF) Solution: A corner-point feasible (CPF) is a solution that lies at a corner of the feasible region. Fig. 3.7 The five dots are the five CPF solutions for the Wyndor Glass Co. problem Common Terminology for LP Model Relationship between optimal solutions and CPF solutions : Consider any linear programming problem with feasible solutions and a bounded feasible region. The problem must posses CPF solutions and at least one optimal solution. Furthermore, the best CPF solution must be an optimal solution. Therefore, if a problem has exactly one optimal solution, it must be a CPF solution. If the problem has multiple optimal solutions, at least two must be CPF solutions. (2,6) (4,3) The prototype model has exactly one optimal solution, (x1, x2)=(2,6), which is a CPF solution The modified problem has multiple optimal solution, two of these optimal solutions , (2,6) and (4,3), are CPF solutions. Matrix Standard Form of an LP Model To help you distinguish between matrices, vectors, and scalars, we use BOLDFACE CAPITAL letters to represent matrices, bold lowercase letters to represent vectors, and italicized letters in ordinary print to represent scalars. Tabular Standard Form of an LP Model Transforming Any LP Model into the Standard Form (1) Minimizing rather than maximizing the objective Maximize Z΄ = – Z (2) Some functional constraints with a less-than-or-equal-to inequality Introduce the concept of slack variables. To illustrate, use the first functional constraint, x1 ≤ 4, in the Wyndor Glass Co. problem as an example. x1 ≤ 4 is equivalent to x1 + x2=4 where x2 ≥ 0. The variable x2 is called a slack variable. (3) Some functional constraints with a greater-than-or-equal-to inequality Introduce the concept of surplus variables. For example, a functional constraint x1 – 2x2 ≥ 5 is equivalent to x1 – 2x2 – x3 = 5 where x3 ≥ 0. The variable, x3 , is called a surplus variable. Transforming Any LP Model into the Standard Form (4) Deleting the nonnegativity constraints for some decision variables Example 1 Original Model Standard Form Example 2 Original Model (1) Set Z΄ = – Z . Then the minimization of Z becomes the maximization of Z΄. (2) Add a slack variable x6 to the left-hand side of the first functional constraints. Standard Form (3) Subtract a surplus variable x7 from the left-hand side of the second functional constraints. (4) Substitute x4 – x5 for x3 where x4 and x5 are nonnegative variables. 1. Solving Linear Programming Problems: The Simplex Method (1) The Essence of the Simplex Method Geometric Concepts of Simplex Method Constraint boundary : a line that forms the boundary of the feasible region. Corner-point solutions: the points of intersection. The 8 points A, B, C, D, E, F, G, and H are corner-point solutions. The five points A, B, C, D and E are the corner-point feasible solutions (CPF solutions). The points F, G and H are called corner-point infeasible solutions. H B C G D A E F Fig.4.1 Contraint boundaries and corner-point solutions for the Wyndor Glass Co. Problem Geometric Concepts of Simplex Method In this example, each corner-point solution lies at the intersection of two constraint boundaries. For a linear programming problem with n decision variables, each of its corner-point solutions lies at the intersection of n constraint boundaries. Fig.4.1 Contraint boundaries and corner-point solutions for the Wyndor Glass Co. Problem Geometric Concepts of Simplex Method Adjacent CPF Soluionts For a two-variable problem, a constraint boundary = a line. For a three-variable problem, a constraint boundary = a plane. For an n-variable problem, a constraint boundary = a hyperplane C D B C A D E F G Optimality test Z=36 at point C (2,6) Z=27 at point D (4, 3) Z=30 at point B (0, 6) B C D Solving the example Z=0 at point A B C Z=30 at point B Z=36 at point C A D Z=27 at point D E Z=12 at point E The Key Solution Concepts The Key Solution Concepts The Key Solution Concepts B C D A E The Key Solution Concepts B A C D E (2) Setting Up the Simplex Method Original Form of the Model Augmented Form of the Model Augmented Form of the Model H H B B C C G G A A D D H(3,2) H(3,2) E E F F For example, H(3,2) is a solution for the original model, which yields the augmented solution ( x1, x2, x3, x4, x5) = (3, 2 ,1 ,8, 5) For example, G(4,6) is a corner-point infeasible solution, which yields the corresponding basic solution ( x1, x2, x3, x4, x5) = (4, 5 ,0 ,0, -6) The only difference between basic solutions and corner-point solutions is whether the values of the slack variables are included Relationship between Corner-Point Solutions and Basic Solutions In the original model, we have In the augmented model, we have Corner-point solution Basic solution Corner-point feasible (CPF) solution Basic Feasible (BF) solution The corner-point solution (0,0) in the original model corresponds to the basic solution (0, 0, 4,12, 18) in the augmented form, where x1 =0 and x2=0 are the nonbasic variables, and x3=4, x4=12, and x5=18 are the basic variables H B C G D A E F Example: The CPF solution (0,0) in the original model corresponds to the BF solution (0, 0, 4,12, 18) in the augmented form, where x1 =0 and x2=0 are the nonbasic variables, and x3=4, x4=12, and x5=18 are the basic variables Choose x1 and x4 to be the nonbasic variables that are set equal to 0. The three equations then yield, respectively, x3=4, x2=6 , and x5=6 as the solution for the three basic variables as shown below. Example: A(0,0) and B(0,6) are two CPF solutions The corresponding BF solutions are ( x1, x2, x3, x4, x5) = (0, 0 ,4 ,12, 18) and ( x1, x2, x3, x4, x5) = (0, 6 ,4 ,0, 6) A(0,0) and C(2,6) are two CPF solutions The corresponding BF solutions are ( x1, x2, x3, x4, x5) = (0, 0 ,4 ,12, 18) and ( x1, x2, x3, x4, x5) = (2, 6 ,2 ,0, 0) H B C G D A H(3,2) E F The Algebra of the Simplex Method Use the Wyndor Glass Co. Model to illustrate the algebraic procedure Initialization Geometric interpretation B A C D E Algebraic interpretation Optimality Test Geometric interpretation A(0,0) is not optimal. Algebraic interpretation The objective function: The rate of improvement of Z by the nonbasic variable x1 is 3 B A The rate of improvement of Z by the nonbasic variable x2 is 5 C D E Conclusion: The initial BF solution (0,0,4,12,18) is not optimal. Iteration1 Step1: Determining the Direction of Movement Geometric interpretation Move up from A(0,0) to B(0,6) B A C D E Algebraic interpretation Iteration1 Step2: Where to Stop Geometric interpretation Algebraic interpretation Stop at B. Otherwise, it will leave the feasible region. Step 2 determine how far to increase the entering basic variable x2. B A C D E Thus x4 is the leaving basic variable for iteration 1 of the example. Iteration1 Step3: Solving for the New BF Solution Geometric interpretation The intersection of the new pair of constraint boundary: B(0,6) Algebraic interpretation Nonbasic variables Basic variables B C Nonbasic variables A D E Basic variables (0) Initial BF Solution Nonbasic variables: x1= 0 (1) x2= 0 (2) Basic variables: x3= 4 x4 =12 (3) x5= 18 (0) New BF Solution Nonbasic variables: x1= 0 (1) x4= 0 (2) Basic variables: x3= ? (3) x2 =6 Basic variables: x3= 4 x2 =6 x5= 6 x5= ? Optimality Test Geometric interpretation B(0,6) is not optimal, because moving from B to C increases Z. B A Algebraic interpretation The objective function: The rate of improvement of Z by the nonbasic varialle x1 is 3 The rate of improvement of Z by the nonbasic varialle x4 is -5/2 C D E Conclusion: The BF solution (0,6,4,0,6) is not optimal. Iteration2 Step1: Determining the Direction of Movement Choose x1 to be the entering basic variable Step2: Where to Stop The minimum ratio test indicates that x5 is the leaving basic variable Step3: Solving for the New BF Solution (0) (1) New BF Solution (2) Nonbasic variables: x1= 0, x4= 0 (3) Basic variables: x3= 2, x2 =6, x1= 2 Optimality Test The objective function: The coefficients of the nonbasic variables x4 and x5 are negative. Increasing either x4 or x5 will decrease Z, so (x1, x2, x3, x4, x5) = (2, 6, 2, 0, 0) must be optimal with Z = 36. B A C D E In terms of the original form of the problem (no slack variables), the optimal solution is (x1, x2) = (2, 6) , which yields Z = 3x1+5x2=36.