Micromouse_Lecture_1
advertisement

Encoders, Motors, Power, Mini Project #1
10/24/2014
We cannot use a simple voltage divider to
provide a consistent voltage source.
As the voltage from the battery decreases during
discharge, the output voltage will decrease!
In order to provide a
consistent source of potential
difference, we need to use
voltage regulators.
We will provide you with a 5V
regulator to connect to your
LiPo battery pack for Mini
Project #1.
Use capacitors to smooth out noise in your signal
Brushed and Brushless
Brushed motors take a DC signal.
Powers an inductor to rotate a magnet.
Increase the voltage and/or current -> Increase
the rotation speed.
Reverse the polarity of the input voltage ->
Reverse the rotation.
Most digital microcontrollers do not have an
analog signal output.
MCU’s output digital signals – either high or low.
So how do we control brushed motors?
Mimics an analog
voltage signal
Square wave with a
certain frequency
This can be used to
control the speed
of a motor
Speed is controlled by rapidly turning the
motor on and off
Turn the motor on for a greater fraction of the
time to make it rotate faster
The percent of time the PWM signal is on is the
duty cycle
0% duty cycle is same as off all the time; 100%
duty is same as on all the time
We cannot connect the MCU to the motor.
MCUs don’t provide enough current to power
motors.
Microcontrollers cannot invert the PWM signal to
rotate the motor in the other direction.
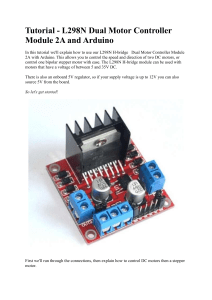
Have the PWM control a H-bridge
PWM controls transistors (think of them as
switches) that allows the battery to pour all its
current to the motor
Easy to control direction
Simplified diagram
Turn Left
Turn Right
Actual implementation for two motors
void turnLeft()
{
digitalWrite(1A, HIGH); //Right wheel
digitalWrite(2A, LOW); //Right wheel
digitalWrite(3A, LOW); //Left wheel
digitalWrite(4A, HIGH); //Left wheel
analogWrite(motorPwrR, 100);
analogWrite(motorPwrL, 100);
}
void turnRight()
{
digitalWrite(1A, LOW);
digitalWrite(2A, HIGH);
digitalWrite(3A, HIGH);
digitalWrite(4A, LOW);
analogWrite(motorPwrR, 100);
analogWrite(motorPwrL, 100);
}
Goal is the same as brushed
motors: rotate something
Mechanics is different
Multiple inductors attract and
repel the magnet
Has more control than DC motors
Controlling brushless motors are
more complicated
But fairly easy to do with IC
chips/software libraries
Helps you determine how far you have
travelled in the maze.
Rotary Encoders attached to wheels
Optical
Magnetic with Hall Effect Sensor
Light reflects off alternating bright or dark areas.
The detector determines when the light was shone
on it. (Mini Project #1 uses this).
Another method: LED shines through a teeth in a
disc to detector on other side.
Attach magnets to a disc
Use Hall effect sensors to detect the changing
magnetic field
Count the ticks to see how far the wheels have
turned
Encoders are constantly outputting data
Your MCU needs to read the values all the
time!
If your MCU is reading values 100% of the
time it can’t do anything useful!
Otherwise you are losing data, or must litter
your code with checks every few lines!
Not a good solution
Interrupts allow you to process data and then
go back to what you were doing
Interrupts allow you to process data and then
go back to what you were doing
“Yo imma let you finish, but this is some of
the most important data of ALL TIME”
An interrupt handler is a short function that
runs when an external event happens
Rest of the program pauses, and continues
after interrupt is done
From the perspective of each, the other
doesn’t exist*
*If your interrupt handler runs for too long (and
too often) it can choke your entire program!
Types of interrupts:
RISING
FALLING
CHANGE
LOW
HIGH
Arduino boards: only two interrupt pins
Teensy: all pins!
The volatile keyword:
Tells the compiler “this value can change at any
time!”
MCU will look up value in memory each time and
not an old value in a register
Anything your interrupt handler modifies should
be volatile, or you may get bugs!
Increment a counter and return (be fast)!
Don’t want to use this counter directly
If you accidentally overwrite it, you might not
be able to know how far you went!
Using good coding style you can prevent
mistakes!
But I’m too good to make such silly mistakes!
▪ Nonsense, we are all human, mistakes happen!
The static keyword:
Means “this variable/function can only be used in
this file only!”
Return value of counter with a function!
Now nobody from the outside can mess with it
directly!
Depends on how fast your encoders are
On super high resolution encoders, it may be
sufficient to track a single pin per encoder
On lower resolution encoders its better to
track both pins changing
Tracking a pin change gives you even “more”
resolution
If a wheel is on the edge between ticks, its
possible to get “false positives”
Demonstrate basic understanding of motor
control and encoders.
DUE DATE: 11/7/2014 SIGN UP EARLY
Parts (abridged)
Teensy 3.1
Motor
H-bridge
Encoders
Keep your eyes peeled for an email for when
the spec sheet for Mini Project #1 is up.
Do not hesitate joining a group you don’t
know to complete the Mini Projects. Make
friends!
Start early!