1Introduction1
advertisement

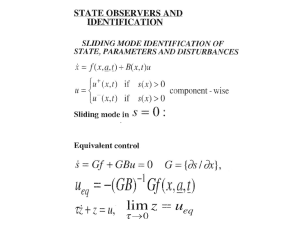
- Introduction (prehistory) - Discrete-time sliding modes - Observers and estimators Chattering problem - High order sliding modes Introduction of Sliding Mode Control First Stage – Control in Canonical Space Introduction of Sliding Mode Control ■ Concept of Sliding Mode ( Second order relay system ) x u, Upper semi-plane : s 0 u u0 x u0 u u0 sgn( s ), s cx x , u0 , c : const Lower semi-plane : s 0 u u0 x u0 • State trajectories are towards the line switching line s=0 • State trajectories cannot leave and belong to the switching line s=0 • After sliding mode starts, further motion is governed by s cx x 0 : sliding mode : sliding mode equation x m s 0 , x u0 In sliding mode, the system motion is (1) governed by 1st order equation (reduced order). (2) depending only on ‘c’ not plant dynamics. x s 0 , x u0 n s cx x 0 Mathematical Aspects II Sliding Mode Existence Conditions Scalar Control: lim s 0 and lim s 0 s 0 Vector s =0 be Control Trajectories should 2 s (T ) 0, s2 (T ) 0 s 0 s=0 1 oriented towards the 2 s1 (T ") 0, s2 (T ") 0 switching surface x u, 3 1 s1=0 u u0 sgn( s ), s cx x , u0 , c : const s1 sign s1 2sign Rs2 s2 2sign s1 sign s2 . [ grad ( s)]T bu ( x) [ grad ( s)]T f ( x) 0 s1 (0T) 0 T [ grad ( s)] bu ( x) [ grad ( s)] f ( x) 0 s ( x )0 s2 (0) 0 Variable Structure Design Approaches Varying Structures for Stabilization Use of Singular Trajectories SLIDING MODES Introduction of Sliding Mode Control ■ Concept of Sliding Mode ( Variable Structures System ) x ax u, u k x sgn( s), s cx x , a, k , c 0 1 If s 0, x 0 or s 0, x 0 then x ax kx 2 If s 0, x 0 or s 0, x 0 then x ax kx x x x x 1 x ax kx c0 x x 0 2 State planes of two unstable structures x ax kx Introduction of Sliding Mode Control • If c<c0, the state trajectories are towards the line switching line s=0 • State trajectories cannot leave and belong to the switching line s=0 : sliding mode • After sliding mode starts, further motion is governed by s cx x 0 : sliding mode equation x 1 s 0, x 0 2 s 0, x 0 In sliding mode, the system motion is (1) governed by 1st order equation (reduced order). (2) depending only on ‘c’ not plant dynamics. x s 0 or cx x 0 2 s 0, x 0 1 s 0, x 0 State planes of Variable Structure System c0 x x 0 c c0 SLIDING MODE CONTROL 0 c c* Motion Equation x cx 0. • Order of the motion equation is reduced • Motion equation of sliding mode is linear and homogenous. • Sliding mode does not depend on the plant dynamics and is determined by parameter C selected by a designer. VSS in Canonical Space x ( n) an x ( n 1) ... a2 x a1 x bu, ai , b are plant parameters, u is controlinput. S.V. Emel’yanov, V.A.Taran, On a class of variable structure control systems, Proc. of USSR Academy of Sciences, Energy and Automation, No.3, 1962 (In Russian). The methodology, developed for second-order systems, was preserved: sliding mode should exist at any point of switching plane, then it is called sliding plane. sliding mode should be stable the state should reach the plane for any initial conditions. VSS in Canonical Space xi xi 1 i 1,...,n 1 n xn ai xi bu, i 1 ai , b are plant parameters, u is controlinput. u kx1 , n k1 if x1 s 0 k k 2 if x1 s 0 s ci xi 0, ci const, c n 1. i 1 Adaptive VSS x b(t )u, bmin b(t ) bmax u kx, k1 if xs 0 k k2 if xs 0 The rate of decay in sliding mode may be increased by varying the gain C depending on b. s x cx 0 bk2 c bk1 2 Adaptive VSS, State Plane E.N. Dubrovski, Adaptation principle in VSS, Proceedings of 2nd Bulgarian Conference on Control, v.1, part 1, Varna, 1967 (In Russian). While sliding mode exists the gain C is increased until sliding mode disappears. Dubrovnik 1964 IFAC Sensitivity Conference Dubrovnik 1964 IFAC Sensitivity Conference Dubrovnik 1964 IFAC Sensitivity Conference