Second Order Sliding Mode, Relative Degree, Finite Time
advertisement

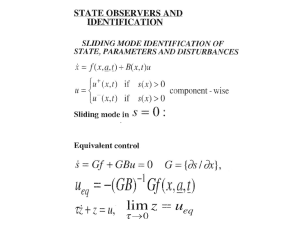
CHATTERING !!! R and relative degree is equal to 1. R can the similar effect be obtained with control as a continuous state function? if control is a non-Lipschitzian function R For the system with and continuous control s s sign ( s) It means that state trajectories belong to the surface s(x)=0 after a finite time interval. Sliding Mode Second Order Sliding Mode and Relative Degree v ∫ u Control is a continuous function as an output of integrator with a discontinuous state function as an input Then sliding mode can be enforced with v as a discontinuous function of and For example if sliding mode exists on line then s tends to zero asymptotically and sliding mode exists in the origin of two dimensional subspace It is hardly reasonable to call this conventional sliding mode as the second order sliding mode. For slightly modified switching line ,, s>0 the state reaches the origin after a finite time interval. The finiteness of reaching time served for several authors as the argument to label this motion in the point “second order sliding mode”. x2 x1 x2 x 2 u 1 u Msign( s), s x2 x1 3 2 s=0 x1 sign( x1 ) 1-2 reaching phase 2-3 sliding mode of the 1st order Point 3 sliding mode of the 2nd order Finite times of 1-2 and 2-3 x1 x 2 x 2 x3 System of the 3rd order 1st phase - reaching surface S=0 2nd phase - reaching curve s=0 in S=0 sliding mode of the 1st order x 3 u u Msign( S ), S s s x2 s sign( s), x1 sign( x1 ) 3rd phase – reaching the origin sliding mode of the 2nd order 4th phase – sliding mode of the 3rd order the origin Finite times of the first 3 phases in TWISTING ALGORITHM Again control is a continuous function as an out put of integrator Of course relative degree between discontinuous input v and output s is still equal to and the conventional sliding mode can be enforced, since ds/dt is used. 1 Super TWISTING ALGORITHM Control u is continuous, no , relative degree of the open loop system from v to s is equal to 2! Finite time convergence and Bounded disturbance can be rejected However it works for the systems for special continuous part with non-lipschizian function. ASYMPTOTIC STABILITY AND ZERO DISTURBANCES FINITE TIME CONVERGENCE Homogeneity property FINITE TIME CONVERGENCE (cont.) Convergence time: Examples of systems with no disturbances HOMOGENEITY PROPERTY for the systems with zero disturbances and constant Mi. Motion Equations: A. Levant, A. Polyakov and A.Poznyak, Yu. Orlov twisting algorithms with time varying disturbances In what follows TWISTING ALGORITHM ) Beyond domain D with Lyapunov function decays at finite rate Trajectories can penetrate into D through SI=0 and leave it through SII =0 only TWISTING ALGORITHM finite time convergence The average rate of decaying of Lyapunov function is finite and negative, which means Finite Convergence Time. Super-Twisting Algorithm Upper estimate of the disturbance F<M/2 DIFFERENTIATORS The first-order system + f(t) z x u - Low pass filter The second-order system v+ u - x - + s f(t) Second-order sliding mode u is continuous, low-pass filter is not needed. • Objective: Chattering reduction • Method: Reducing the magnitude of the discontinuous control to THE minimal value preserving sliding mode under uncertainty conditions. 0 1 1 [sign( x)]eq a/k (t ) 0 k First, it was shown that 1. (t ) 0 <k is necessary condition for convergence 2. For any 0 <k there exists 0 0 such that finite-time convergence takes place for Then Similarly . In sliding mode 0 k k (t ) sign( (t )), (t ) sign( x(t )) eq , 0 1 1. sign( x(t )) eq (t ) , k (t ) is close to k (t ). (t ) k , Challenge: to generalize twisting algorithm to get the third order sliding mode adding two integrators with input similar to that for the 2nd order: Unfortunately the 3rd order sliding mode without sliding modes of lower order can not be implemented, indeed time derivative of sign-varying Lyapunov function