Angle of TWIST
advertisement

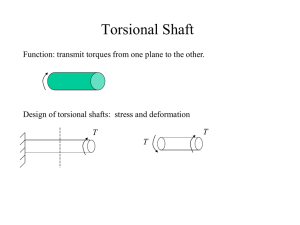
Classes #3 & #4 Civil Engineering Materials – CIVE 2110 Torsion Fall 2010 Dr. Gupta Dr. Pickett 1 Torque and Torsional Deformation Torque is a MOMENT applied about the LONG axis of a circular shaft. Shaft twists about the LONG axis. Circles remain circles. Each Longitudinal grid line deforms into a HELIX, that intersects the circles at EQUAL angles. Torque and Torsional Deformation Torque is a MOMENT applied about the LONG axis of a circular shaft. Shaft length & radius do NOT change. Ends of shaft remain flat, perpendicular to long axis. Radial lines remain STRAIGHT. Torque and Torsional Deformation If shaft is FIXED at one end and Torque applied at other end, Radial lines - remain straight - rotate thru an angle of twist (x) - angle of twist varies along length of shaft Torque and Torsional Deformation An element located x from the back end of the shaft, will have different angles of twist (rotations) on its front and back faces. ( x) and ( x) The difference in angles of twist causes Torsional SHEAR STRAINS. Angles change from 90˚. lim ' C A _ along_ CA 2 B A _ along _ BA in the horizontal plane BD Tan x thus BD xTan x Angles change from 90˚. lim ' C A _ along_ CA 2 B A _ along _ BA in the vertical plane BD Tan thus BD Tan setting BD BD gives x thus x For all elements on the cross section at x, dx and d are the sam e thus d is constant over the cross sec tion dx consequently shear strain varies linearily with from zero at center to maxim um at outside edge max c c For all elements on the cross section at x, shear strain varies linearily with from zero at center to maxim um at outside edge c max c max Torsional Shear Stress For circular shafts, hollow or solid, If material is - Homogeneous - Linear-Elastic Hooke’s Law gives: G Thus, like Shear Strain, Shear Stress, varies linearly with Radial distance from center of shaft. max c Torsional Shear Stress Each elemental area, dA located at ρ from the center, will have an internal Force, dF, dF (dA) that will produce an internal Resisting Torque, T. T dF dA max (dA) c A A T max c 2 A max c Torsional Shear Stress Polar Moment of Inertia, J: for a Solid Shaft; sin ce circum ference 2 the area of a is dA (2 )d ring thickness d of 2 4 4 J dA (2 )d 2 d ( c) c 4 2 A 0 0 c c 2 2 3 for a hollow shaft J c 2 4 outside c 4 inside max c Axial Shear Stress (solid shaft) In order for any element to be in equilibrium the internal torque, T, must develop an Axial Shear Stress, equal to the Radial Shear Stress, also varying Linearly with radial position. axial radial T max J c Axial Shear Stress (hollow shaft) In order for any element to be in equilibrium the internal torque, T, must develop an Axial Shear Stress, equal to the Radial Shear Stress, also varying Linearly with radial position. axial radial T max J c Axial Shear Stress (wood shaft ) In order for any element to be in equilibrium the internal torque, T, must develop an Axial Shear Stress, equal to the Radial Shear Stress, also varying Linearly with radial position. axial radial T max J c Torque and Torsional Deformation If shaft is FIXED at one end and Torque applied at other end, Radial lines - remain straight - rotate thru an angle of twist (x) - angle of twist varies along length of shaft Torque and Torsional Deformation An element located x from the back end of the shaft, will have different angles of twist (rotations) on its front and back faces. ( x) and ( x) The difference in angles of twist causes Torsional SHEAR STRAINS. Angle of TWIST Angles change from 90˚. lim ' C A _ along_ CA 2 B A _ along _ BA in the horizontal plane BD Tan x thus BD xTan x Angle of TWIST - Angles change from 90˚. lim ' C A _ along _ CA 2 B A _ along _ BA in the vertical plane BD Tan thus BD Tan setting BD BD gives x thus x Angle of TWIST thus recalling x G and T J T if shaft has _ constant radius and constant _ applied_ Torque GJ or _ if Torque or radius or m aterial var y along shaft length T ( x) ( x) then G ( x) J ( x) then and T ( x) ( x) x T ( x) x G ( x) J ( x) G ( x) J ( x) L T ( x) x G ( x) J ( x) 0 int egrating over the length gives usually the m aterial is homogeneous so G constant L 1 T ( x) thus dx G 0 J ( x) and if radius and Torque are constant TL GJ Angle of TWIST if there are changes in Torque or radius or m aterial TL then GJ Material must be: - Homogeneous Isotropic Linear Elastic Stress < (Yield Stress = Proportional Limit) Angle of TWIST Sign Convention: Positive direction is: - Point right hand thumb outward from shaft - Right hand fingers curl in positive rotation