Increasing asymptotic stability of Crank-Nicolson
advertisement

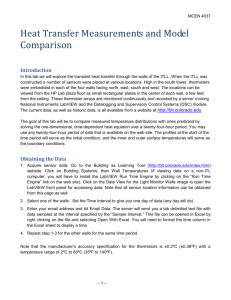
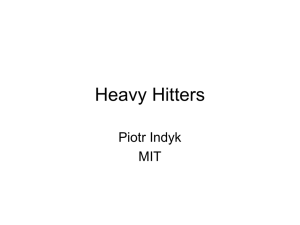
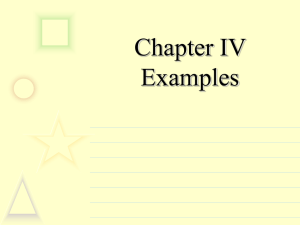
Increasing asymptotic stability of Crank-Nicolson method Alexei A. Medovikov Vyacheslav I. Lebedev Summary • The Crank-Nicolson method has second order accuracy, but for stiff ODEs, the numerical solution has unexpected oscillatory behavior, which can be explained in term of its stability function • Variable time steps by Crank-Nicolson method allow us to formulate optimization problem for roots of the stability function • The solution of this problem is the rational Zolotarev function • We present robust algorithm of step-size selection and numerical results of the optimization procedure The exact solution of the heat equation can be found by the method of separation of variables k c e k X k(x) u u t x 2 0 u(x,0) u (x) u(x, t) u(0, t) u(1, t) 0 ck (u0, X k(x))L2 2 k 1 2 sin(kx) X k(x) We expect to have similar properties from the numerical solution: 2 u(x, t) L2 c e k k 1 2 kt e 2 1t c k 1 2 k e 2 1t 0 2 u (x) L 2 k k2 2 Method of lines: Lebedev, V. I. The equations and convergence of a differential-difference method (the method of lines). (Russian) Vestnik Moskov. Univ. 10 (1955), no. 10, 47--57 2u(t) ui 1(t) 2ui(t) ui 1(t) 2 x x 2 dui u 2ui ui 1 i 1 , 2 dt x i 1, , n dy Ay dt To solve the ODE we use midpoint rule or trapezoidal rule: y j1 y j y j1 y j A 2 y j c k k 1 x (Xk )i x j k x q Xk qk 1 0.5kx 1 0.5kx 2 sin(kxi) (a, c) ckx ( y 0, Xkx ) kx n a c x i i i 1 4 2 sin (kxi / 2) 2 x y j 2 n ck2q k2j 2j y0 k 1 2 max q k 1 k n q k R1( k ) Rk(0) 1 k R'k (0) hj j 1 R1( ) 1 0.5 1 0.5 Rs( ) 1 0.5hi i 1 1 0.5hi Stability function of the classical Crank-Nicolson method (a) s Rk( max) ( 1)k ( y, X n) ( 1)k( y0, X n) Initial value of the heat equation (a). Exact solution of the heat equation (b). The solution of the heat equation by Crank-Nicolson method with 3 constant steps the optimal method x / 3 (c), and solution by 3 with the same sum of steps (d): x h i i 1 Fourier coefficients cnx (y, Xn) Composition Methods dy f( y, t) ODEs generate a map: dt y( ) ( y0) t2 t1 ( y0) t1 t2 1 2 s Yi y0 h aijf(Yj, t cj) j 1 Runge-Kutta method generates a map: y1(h) h(y0) s y1 y0 h bif(Yi, t ci) i 1 Composition of maps generated by RK method is composition method: ( , , k )(y ) 1 2 k ( y 0 ) i 1 i 1 hi i h i i Properties of RK map depend on division 1, , k Stability function Applying RK method to simple test problem lead to function-multiplier, which is responsible for stability of the method s y' y Yi y0 h aijYj j 1 s y1 y0 h biYi (I hA)Y ey0 i 1 Y hbTY y1 y0 T (Y1, , Ys ) e T (1, ,1) I hA 0 Y e y0 T 1 y1 hb 1 det(I hA hebT ) y1 y0 det(I hA) b T ( b1, , bs ) Stability function of composition methods: yk Rk(k) R1(1)y0 Composition of mid-point rules define new method and appropriate choice of steps allows us to improve properties of the stability function v0 y0 v j h v j1 v j v hjf , hk j 1 2 2 k 1 v m, t1 t0 , j1 y1 j m h k k 1 Rm() m 1 0.5j 1 0.5 j 1 j 1, , m How to optimize m and 1 ()2 / 2 max R( ), in order to have maximum average time-step: [ 1,max ] /m R( 1) , 1 R( ) , 0 1 Zolotarev rational function hm j 1 2 2j 1 a( ) a( ) max , dn K' 2 m max max , m h j j 1 Theorem (Medovikov): Sum of steps of Zolotarev function for the interval a, max equals m(a) m hj 2m j 1 k a / max, k2 m k 2m m C k' 2 2r 1 r 1 m , K'(k2 m )k2 m , K'(k)kmax 1 k Cr rK' sn , k 2m 2 ( 1)p q 2 mp(k' ) 1 4 m(a)max 2 mp K' k (k' ) P 1 1 q m 2n ( 1)p q 2 mp(k' ) 1 4 2 mp K' k (k' ) P 1 1 q 2n 1 The Algorithm m(a) max(tol) (a) (a) max Rm( ) [a,max ] Wachspress E.L. Extended application of alternating direction implicit model problem theory. SIAM J. Appl. Math. 11 (1963) (1 2 )(1 i ) hi i / 2 , (1 1 i 1 i )max 2 h ,m 1 amax m h i 0 i 1 (a) Rm( max) i 1, , m 1 Rk( max) ( 1)k ( y, X n) ( 1)k( y0, X n) Initial value of the heat equation (a). Exact solution of the heat equation (b). The solution of the heat equation by Crank-Nicolson method with 3 constant steps the optimal method x / 3 (c), and solution by 3 with the same sum of steps (d): x h i i 1 Embedded methods hp d p y y y0 C0 (h p 1 ) p p! dh p 1 p 1 1 y h p 1 d p 1 y y0 C1 (h p 2 ) p 1 ( p 1)! dh h p 1 d p 1 y y ( h ) y0 C2 ( h p 2 ) p 1 ( p 1)! dh p 1 errnew y ( h) y1p C new hnew errnew tol Cnew Cold p 1 Cnew err / hold p 1 hold err p 1 tol hnew 1 / p 1 hnew tol hold err p 1 1 d p 1 y C0 h p 1 O(h p 2 ) p 1 ( p 1)! dh p 1 1 d p 1 y C0 h p 1 O(h p 2 ) p 1 ( p 1)! dh err y (h) y p 1 1 err y y