t - Confex
advertisement

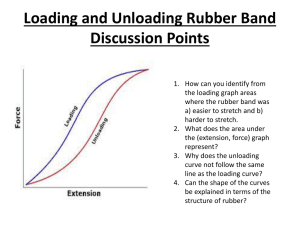
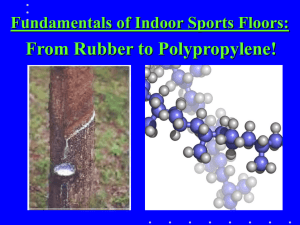
30th Annual Conference on Tire Science and Technology September 13-14, 2011 Akron, Ohio, USA Yusuke Minami* Tomoaki Iwai**, Yutaka Shoukaku** * Graduate School of Natural Science and Technology Kanazawa University ** College of Science and Engineering Kanazawa University Table of contents 1. Introduction and objective 2. Apparatus and method Friction experiment and condition Observation method Observation area 3. Results and discussions Coefficient of friction Observation in leading area Observation in trailing area 4. Conclusions Table of contents 1. Introduction and objective 2. Apparatus and method Friction experiment and condition Observation method Observation area 3. Results and discussions Coefficient of friction Observation in leading area Observation in trailing area 4. Conclusions Studless Tire Studless tires are designed for use in winter conditions, such as snow and ice Characteristics of studless tires Soft tread compound Increase the contact area A lot of sipes in the tread pattern Wipe and evacuation the water FIG.1 Tread of studless tire The tread rubber of studless tire has been devised in various ways. Design of tread pattern and sipes Various hard materials in tread rubber glass fibers, ceramics, nut shell・・・ Development of tread compound Porous rubber is tread compound that has numerious pores both surface and inside. FIG.2 Porous rubber surface Effect of the porous rubber ・The decrease in elastic modulus of the rubber ・The water removal between tire tread and road surface by water absorption effect of the pores. FIG.3 Water removal image The real contact area between the tire and the wet road is believed to be increased The removal of the water for absorption by the pores on surface of porous rubber, as the details of the process was not clearly understood. Objective The purpose of this study was to clarify the effect of water absorption by the pores in contact area during sliding under wet conditions. Table of contents 1. Introduction and objective 2. Apparatus and method Friction experiment and condition Observation method Observation area 3. Results and discussions Coefficient of friction Observation in leading area Observation in trailing area 4. Conclusions Friction experiment and experimental condition A rotating rubber specimen was rubbed against a mating prism. ➢The friction surface between rubber specimen and dove prism is observed through dove prism. FIG. 4 Experimental apparatus: 1, weight; 2, rubber specimen; 3, dove prism; 4, parallel leaf spring; 5, strain gauge; 6, prism holder; 7, linear guide. ➢The friction force was measured by strain gauges were attached to the parallel leaf spring. 12.5mm Pore TABLE 1 Specification of the rubber specimen Formulation of Natural rubber filled rubber specimen with carbon black Pore diameter, mm No pore, f 0.5, f 1, f 2 FIG.5 Rubber specimen Syringe TABLE 2 Experimental condition Sliding speed v, mm/s Normal load, N 3-30 Pure water 14.7 TABLE 3 Specification of the fine particles material diameter, mm calcium carbonate 50-80 Rolling direction Mating prism Rubber specimen FIG.6 Cross section of contact surface between the prism and the rubber specimen Observation method (a)Total internal reflection method (b) Orthographic method FIG.7 Optical systems for the contact area measurement: 1, rubber specimen; 2, dove prism; 3, CCD camera; 4, light sources. To distinguish the contact surface against rubber, water, and air. (a)Total internal reflection method To observe and visualize the water flow (b) Orthographic method FIG.7 Optical systems for the contact area measurement: 1, rubber specimen; 2, dove prism; 3, CCD camera; 4, light sources. - The total internal reflection method n1 > n2 Medium 1 Incident light θ1 Reflected light θ1’ n1 sin 1 n2 sin 2 n1 n2 Medium 2 θ2 When incident light as passes from a medium of high refractive index n1 to a medium of lower refractive index n2, Refraction light FIG. 8 Refraction of light as passes from a medium of high refractive index (n1) to a medium of lower refractive index (n2) ・・・(1) - The total internal reflection method n1 > n2 Medium 1 Incident light θ1 Reflected light θ1’ n1 n2 Medium 2 Incident angle is increasing, the reflected angle becomes right angle and the incident light completely reflected. θ2=90° FIG. 8 Refraction of light as passes from a medium of high refractive index (n1) to a medium of lower refractive index (n2) Now, the incident angle is called the critical angle. Based on Eq. (1), the critical angle c was determined as follow: c sin 1 n2 n1 ・・・(2) TABLE 4 Refractive index Prism 1.52 Rubber 1.51-1.52 Water Air 1.33 1.0 TABLE 5 Critical angle as the light passes from the prism Incident medium Critical angle, ° Rubber 83-90 Water Air 61 41 - The total internal reflection method rubber water air prism θ1 θ1 41° < θ1 <61° θ1 (a) Cross section (b) Total internal reflection image FIG. 9 Reflected light and the refracted light at the interface of various refractive indexes - The total internal reflection method rubber water air prism θ1 θ1 41° < θ1 <61° θ1 (a) Cross section (b) Total internal reflection image The differences of intensity of refracted the reflected FIG. 9 The reflected light and the light atlight the allow interface ofofvarious refractive indexes distinction contact surface variation To distinguish the contact surface against rubber, water, and air. (a)Total internal reflection method To observe and visualize the water flow (b) Orthographic method FIG.7 Optical systems for the contact area measurement: 1, rubber specimen; 2, dove prism; 3, CCD camera; 4, light sources. - Visualized water flow- (a) t1 (c) Particles at t2 superimposed on the image at t1 (b) t2 (d) Movement direction of each particles from t1 to t2 FIG. 10 Principle of the particle tracking velocimetry (PTV) - Visualized water flow- (x2. y2) (x1. y1) (x4. y4) (x3. y3) (a) t1 (b) t2 Δy (c) Movement direction of each particles from t1 to t2 FIG. 11 PTV considered relative displace between pore and particles - Visualized water flow- (x2. y2) (x1. y1) (x4. y4) (x3. y3) (a) t1 (x1. y1) (b) t2 (x4. y4) (x2. y2) (x2. y2) (x1. y1) Δy Δy (x4. y4) (x3. y3) (x3. y3) (x1. y1-Δy) (c) Movement direction of each particles from t1 to t2 (x2. y2-Δy) (d) Superimposed image considering the relative distance between pore and particles FIG. 11 PTV considered relative displace between pore and particles Observation area Mating prism Leading area The surface transitioned from noncontact to contact with the mating prism. Trailing area Rolling direction Rubber specimen FIG. 12 Definition of the area of contact The surface of transitioned from contact to noncontact with the mating prism. Table of contents 1. Introduction and objective 2. Apparatus and method Friction experiment and condition Observation method Observation area 3. Results and discussions Coefficient of friction Observation in leading area Observation in trailing area 4. Conclusions Coefficient of friction μ Coefficient of friction 0.6 no pore φ0.5 φ1 φ2 0.5 0.4 0.3 0.2 0.1 0 0 10 20 30 Sliding speed v , mm/s FIG. 13 Variation in coefficient of friction with the pore diameter under wet conditions 40 Coefficient of friction μ Coefficient of friction 0.6 no pore φ0.5 φ1 φ2 0.5 0.4 0.3 0.2 0.1 0 0 10 20 30 40 Sliding speed v , mm/s Fig. 12 Variation infriction coefficientof of friction with the The coefficient of the rubber pore diameter under wet conditions specimen with pores was larger than that of the rubber specimen without pores. (b) 0.4s 2mm (a) 0.2s (c) 0.6s (d) 0.8s Sliding direction of rubber Observation in leading area 2mm FIG. 14 Rubber surface of leading area observed by the total internal reflection method Front edge (b) 0.4s 2mm (a) 0.2s (c) 0.6s (d) 0.8s Sliding direction of rubber Observation in leading area 2mm FIG. 14 Rubber surface of leading area observed by the total internal reflection method (b) 0.4s 2mm (a) 0.2s Rear edge (c) 0.6s (d) 0.8s Sliding direction of rubber Observation in leading area 2mm FIG. 14 Rubber surface of leading area observed by the total internal reflection method Observation in leading area air rubber (a) 0.2s 2mm (b) 0.4s (c) 0.6s water and air exist coincide in the pore (d) 0.8s 2mm The pore contained an air bubble during the sliding. Sliding direction of rubber water Observation in leading area air rubber (b) 0.4s 2mm (a) 0.2s (c) 0.6s (d) 0.8s 2mm The front edge became noncontact with the mating prism. Sliding direction of rubber water (iv) t2=0.8s (i) t2=0.2s (ii) t2=0.4s (iii) t2=0.6s (a) Orthographic images of particles at time t2 (i) From t1=0s to t2=0.2s (ii) From t1=0.2s to t2=0.4s (iii) From t1=0.4s to t2=0.6s (iv) From t1=0.6s to t2=0.8s (b) Displacement of particles and pore from t1 to t2 2mm FIG. 15 Orthographic image of particles and the flow results of PTV in leading area Sliding direction of rubber Observation in leading area Observation in leading area The water did not intrude into the pore when the pore was rubbed. The water flowing along the edge of pore was observed. FIG.16 Superimposed image considering the relative distance between pore and particles Observation in leading area water air 2mm rubber 2mm The pore contained the air bubble during the sliding. The water flowing along the edge of pore was observed. The water flow detouring the pore is due to the air bubble in the pore. The air bubble in the pore pushed aside the water. (b) 0.4s 2mm (a) 0.2s (c) 0.6s (d) 0.8s Sliding direction of rubber Observation in trailing area 2mm FIG. 17 Rubber surface of trailing area observed by the total internal reflection method (b) 0.4s 2mm (a) 0.2s (c) 0.6s (d) 0.8s Sliding direction of rubber Observation in trailing area 2mm The air in the pore remained even if the pore left the prism. (b) 0.4s 2mm (a) 0.2s (c) 0.6s (d) 0.8s Sliding direction of rubber Observation in trailing area 2mm The front edge was not contact with the mating prism as with leading area, and the rear edge of the pore contacted with mating prism even if the pore left the mating prism. (i) t2=0.2s (ii) t2=0.4s (iv) t2=0.8s (iii) t2=0.6s (a) Orthographic images of particles at the time t2 (i) from t1=0s to t2=0.2s (ii) from t1=0.2s to t2=0.4s (iii) from t1=0.4s to t2=0.6s (iv) from t1=0.6s to t2=0.8s (b) Displacement of particles and pore from t1 to t2 2mm FIG. 18 Orthographic image of particles and the flow results of PTV in trailing area Sliding direction of rubber Observation in trailing area Observation in trailing area The water flowed along the pore edge. No particles were observed to cross the rear edge. FIG. 19 Superimposed image considering the relative distance between pore and particles 2mm Observation in trailing area 2mm The rear edge of the pore contacted with mating prism even if the pore left the mating prism. The water flowed along the pore edge and didn’t cross the rear edge. The rear edge of the pore was probably rubbed strongly against the prism and wiped the water. Table of Contents 1. Introduction and Objective 2. Apparatus and method Friction experiment and condition Observation method Observation area 3. Results and discussions Coefficient of friction Observation in leading area Observation in trailing area 4. Conclusions Conclusions 1. The coefficient of friction of the rubber specimen with pores was larger than that of without pores under wet condition. 2. The pore contained an air bubble during sliding under wet condition. 3. The front edge of the pore was not contact with the mating prism. On the other hand, the rear edge of the pore contacted with mating prism even if the pore left the mating prism. 4. The water flow detouring the air bubble in the pore was also observed. Thank you for your kind attention -Observation of contact area (Leading area)- -Observation of contact area (Trailing area)- ・Observation method - Visualized water flow- (a) t1 (c) Particles at t2 superimposed on the image at t1 (b) t2 (d) Movement direction of each particles from t1 to t2 ・Observation method - Visualized water flow(x2. y2) (x1. y1) (x4. y4) (x3. y3) (a) t1 (b) t2 (x4. y4) (x1. y1) (x4. y4) (x2. y2) Δy (x3. y3) (x3. y3) (x1. y1-Δy) (c) Movement direction of each particles from t1 to t2 (x2. y2-Δy) (d) Superimposed image considering the relative distance between pore and particles FIG. 7 PTV considered relative displace between pore and particles. Studded Tire Studless tires are designed for use in winter conditions, such as snow and ice Characteristics of studded tires Roughening the ice Providing better frivtion between the ice and the soft rubber Increased the road wear by the studs Use of studs is regulated in most countries, and even prohibited in some located FIG Studded tire Friction force of Studded Tire Fig Concept of tread pattern design for snow and ice covered road Fig Rate of frictional force under various road condition Rubber friction force Rubber friction force F F = FH + a ( FA + FD) FH : Hysteresis Friction Energy loss caused by deformation of tread derived from road roughness FA : Adhesion Friction Energy loss Rubber caused by adhesion between tread and road Rubber Road surface Road surface a : Friction improving coefficient developed by displacement of water friction FD : Digging Friction Energy loss caused by scratching road surface and wearing of rubber itself Rubber Road surface (a)Aspect ratio AR=0.5 (b)Aspect ratio AR=1 Fig. Variation in coefficient of friction with the pore diameter Composition of rubber specimen NR ISAF CB ZnO Stearic acid Antioxidant Oil Vulcanization accelerator Sulfur 100 2 4 2 2 3 1 1.5