Document
advertisement

Lecture 2
Signals and Systems (II)
Principles of Communications
Fall 2008
NCTU EE Tzu-Hsien Sang
1
Outlines
•
•
•
•
•
•
•
Signal Models & Classifications
Signal Space & Orthogonal Basis
Fourier Series &Transform
Power Spectral Density & Correlation
Signals & Linear Systems
Sampling Theory
DFT & FFT
2
Examples
• Symmetry Properties of x(t) and Its Fourier
Function
*
X
X
For real periodic x(t), n
n
For real aperiodic x(t), X ( f ) X * ( f )
3
• Fourier Transform of Singular Functions
(t ) is not an energy signal (hence doesn’t
satisfy Dirichlet condition).
However, its FT can be obtained by formal
definition.
FT
FT
(t ) 1, 1 ( f ),
j 2f0
A (t t0 ) Ae
FT
• Example: The FT of
, Ae
jf0t
FT
A ( f f 0 ),
(t nT ) ?
n
0
4
• Fourier Transform of Periodic Signals—
Periodic signals are not energy signals (don’t
satisfy Dirichlet’s conditions). But we are
doing it anyway (at least formally)…
• Given a periodic signal
jn 0t X ( f )
X n ( f nf0 )
x(t ) X n e
n
n
2f 0t
• Example-1: cos
• Example-2: (t nT0 )
n
(A pulse train! What good are they for?)
5
Note: This table uses “” instead of “f”. But it doesn’t hurt the fundamental facts.
6
7
Transform Pairs (There is something nice
to know in life…)
8
9
10
• Let FT of an aperiodic pulse signal p(t) be
{ p(t )} P( f )
• We can generate a periodic signal x(t) by
duplicating p(t) at every interval Ts, then
x(t ) [
(t nT )] * p(t ) p(t nT )
s
s
n
n
• From convolution
theorem,
X ( f ) {[
(t nT )]} P( f )
s
n
fs
( f nf ) P( f ) f P(nf ) ( f nf )
s
n
s
n
s
s
11
Taking inverse FT of the eq. on previous page.
1
{ X ( f )} x(t )
s
n
1
f
P
(
nf
)
s s { ( f nfs )}
n
p(t nTs )
n
p(t nT ) { f P(nf ) ( f nf )}
1
n
s
s
s
j 2nf st
f
P
(
nf
)
e
s s
n
j 2nf s t
f
P
(
nf
)
e
s s
n
Poisson sum formula
12
Power Spectral Density & Correlation
• Why should we care about the “frequency
components” of a signal?
• For energy signals:
( ) 1{G( f )} 1[ X ( f ) X * ( f )] 1[ X ( f )] 1[ X * ( f )]
T
x( ) x( ) x( ) x( )d lim x( ) x( )d
T T
• The time-averaged autocorrelation function
• The squared magnitude of the FT represents
the “energy” distributed on the frequency axis.
(0) E signal energy.
13
• For power signals:
R( ) x( ) x* (t )
1 T
*
lim
x(t ) x (t )dt, if aperiodicpowersignal
T 2T T
1
*
if periodicpowersignal
x(t ) x (t )dt,
T0 T0
R(0) S ( f )df
S ( f ) {R( )}
“Power spectral density function”
• For periodic power signals:
S ( f ) {R( )}
| X n |2 ( f nf0 )
n
14
• The functions () and R() measure the
similarity between the signal at time t and t+.
• G(f) and S(f) represents the signal energy or
power per unit frequency at freq. f.
2
R
(
0
)
power
x
(t ) R( ) , , max{R( )} R(0).
•
• R() is even for real x(t): R( ) x(t ) x* (t ) R( ).
• If x(t) does not contain a periodic component:
2
lim R( ) x(t ) .
| |
• If x(t) is periodic with period T0, then R() is
periodic in with the same period.
• S(f) is non-negative. S ( f ) {R( )} 0, f
15
• Cross-correlation of two power signals:
Rxy ( ) x(t ) y * (t ) x(t ) y * (t )
1
lim
T 2T
T
T
x(t ) y * (t )dt
• Cross-correlation of two energy signals:
xy ( )
x(t ) y* (t )dt
• Remarks: Rxy ( ) R ( ), xy ( )
*
yx
*
yx ( )
16
Signals & Linear Systems
x (t )
Η
y (t )
y (t ) H {x(t )}
• The standard input/output black box model for
linear systems. Q: Why does it work?
• Linear: Satisfies superposition principle
y(t ) H{1 x1 (t ) 2 x2 (t )}
H{1 x1 (t )} H{ 2 x2 (t )} y1 (t ) y2 (t )
• Time-invariant: Delayed input produces an
output with the same delay.
H {x(t t0 )} y(t t0 )
17
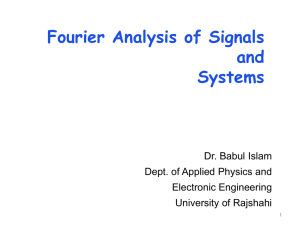
Describing LTI Systems with Impulse Responses
• Let h(t) be the impulse response: h(t ) H { (t )}.
x(t )
x( ) (t )d
y(t ) H {x(t )} H { x( ) (t )d}
x( )H { (t )}d
If time-invariant,
y(t ) H {x(t )} x( )h(t )d x(t ) * h(t )
H {x(t t0 )} x( )h(t t0 )d y(t t0 )
18
Note: This example is a linear, but not time-invariant system.
19
• The convolution form holds iff LTI.
• Duality of signal x(t) & system h(t):
y(t )
x( )h(t )d
h( )x(t )d
• The Convolution Theorem:
{ y(t )} Y ( f ){
h( )x(t )d} H ( f ) X ( f )
Key application: generally H ( f ) X ( f ) is easier
20
than x(t ) h(t ) …