Lecture 4
advertisement

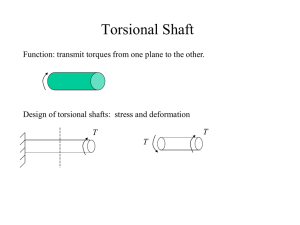
LECTURE #4 REVIEW OF TORSION Course Name : DESIGN OF MACHINE ELEMENTS Course Number: MET 214 • When an external torque is applied to a shaft, an internal resistance is developed within the shaft that prevents slippage. • The resulting internal resistance created in the shaft is called torsional shear stress. The resultant of the resisting stresses existing on any cross sectional plane of the shaft constitutes an internal resisting torque. In addition to creating torsional shear stresses, external torque loads will cause a shaft to twist by an amount referred to as the angle of twist. • To assist in the characterization of the internal resisting torques, the method of sections will be utilized to create plots depicting the variation of internal torque as a function of position along the length of the shaft. To apply the method, the shaft is cut at various locations along the length proceeding from left to right thereby dividing the shaft into sections. Due to equilibrium considerations (ΣT = 0) the internal resisting torque at any cutting plane must oppose the net external torque acting on the section of the shaft existing to the left of the cutting plane. • To create plots depicting the variations of internal torque as a function of position at each cutting plane location, perform the following steps 1. Determine net external torque acting on the section to the left of a cutting plane. 2. Determine internal reaction torque necessary to maintain equilibrium of the section (ΣT = 0) 3. Curl fingers of right hand in direction of internal reaction torque. 3a) if thumb of right hand is pointing away from the section, assign a positive value to the internal reaction torque at the cutting plane. 3b) if thumb of right hand is pointing toward section, assign a negative value to the internal reaction torque. Consider the example shown below: When designing subsystem components for a power transmission system, the designer must insure that the shafts used in the system can accommodate the levels of torque that are going to be propagated through the system. Accordingly, shafts must be designed to avoid failure due to torsional shear stress effects attributed to external torque loading. To investigate how externally applied torques effect shaft design, consider the situation depicted below which illustrates a shaft fixed at one end and an external torque applied at the top end. As exemplified by the illustrations provided below, the use of curvilinear squares facilitates the realization that external torques loads applied to a shaft lead to shear stresses in the shaft. Due to the manner of how the side ad of the stress element shown in the diagram above was displaced in response to the external load torque, a relationship needs to be formulated that relates the external torques applied to a shaft to the internal shear stresses created in the shaft. To emphasize the relevance of the derivation to be presented subsequently, consider a few applications which involve the torque loading of a shaft. Examples include power hand tools such as grinders. Friction forces existing between the grinding wheel and the work piece create a torque load that acts on the shaft connecting the grinding wheel to the motor. Additional examples exist in the text book (Mott) page 634 which illustrate several design alternatives for a saw drive design project. Considering the examples shown below, the forces at the periphery of the cutting tool, which depend upon the type of material to be processed and the rotation rate of the cutting tool, which depends on the recommended cutting rates for the material, establish the power requirements for the saw blade. Since the motor must drive the saw blade, the power requirements for the saw blade establish the power requirements for the motor. The use of belt drives or chain drives in the system shown on the previous slide enables the power P=T 𝜔 from the motor to be transferred to the cutting tool. When using a belt and/or chain drive to transfer an amount of power P from a motor to a load, the relative amounts of torque T and speed of rotation 𝜔 associated with the power P being transferred can be adjusted. How such adjustments are achieved by these types of systems will be discussed at length when belt drives are discussed in a subsequent lecture. It is frequently necessary to adjust the relative amounts of speed and torque when transferring power since typically, when designing a system, a motor with an acceptable power rating may be identified, but the motor will probably operate with a different speed and torque combination than what is required to operate a load. Typically, belt drive systems are used when the speed of a motor must be reduced. In the process of adjusting the torque and speed levels associated with the amount of power P to be transferred from the motor to the saw blade, the components used in the belt and/or chain drive system invariably apply external torque loads to the shafts used in the system which leads to internal shear stresses in the shafts. The shafts must be designed to accommodate the torsional shear stresses created by the external torque loads applied to the shafts. The expression max r indicates how torsional shear stress varies with radius. The C shear stress reaches a maximum when r= C, i.e. shear stress is a maximum at outside radius of shaft. The variation of shear stress with r is depicted below. max r C when r=0 r= C 0≤τ≤τmax τ=0 τ=τmax For equilibrium conditions, the internal resisting torque at any cutting plane must balance the net external torque existing on a section to the left of the cutting plane. The following relationship holds. Text max C J max TextC J Note: As J increases (i.e. larger diameter shaft) then τmax decreases max r TC r Tr C J C J D 4 For solid circular shafts: J 32 16T max 3 D When designing shafts it is necessary to specify diameter to accommodate an allowable amount of stress. Rearranging the above expression yields the following formula: D3 16T max 3 16T all The maximum shear stress that can exist is the allowable stress i.e. max ≤ all = 𝑆𝑌 2𝑁 The stress distribution in a solid shaft has been plotted along three arbitrary radial lines as shown in the figure below. Determine the resultant internal torque at the section. A solid steel shaft AB shown in figure below is to be used to transmit 5 hp from the motor M to which it is attached. If the shaft rotates at w=175 rpm and the steel has an allowable shear stress of τallow =14.5 ksi, determine the required diameter of the shaft to the nearest 1/8 in. In certain applications, a shaft must be designed to prevent excessive twisting. Examples include laser scanners. The motor orientates the mirror by rotating the rotor shaft. As is easily visualized, any twist existing in the rotor shaft will cause an error in the orientation of the reflected laser beam. According, the twist angle of a shaft must be limited to a value consistent with the level of distortion permitted in the image being generated by the scanner. Levels of distortion permitted in an image depend on the particulars of the application. As will be evident after discussing angle of twist, the techniques for controlling twist angle include reducing the length of the shaft, increasing the diameter of the shaft and material selection., i.e. specifying a suitable value for G. Accordingly, it light of the above application, it is necessary to develop relationships relating applied torque to angle to twist so the amount of twist can be controlled. Relationships involving AE can be determined from the drawing provided below. From top perspective of drawing, AE C From side perspective, AE max L Equating expressions for AE C max L max Recall L C max G max max max TC J Substituting yields Where TC L TL JG C JG = angle of twist. max G A 38-mm diameter solid shaft, 2m long, is subjected to a torque of 600 N-m, as shown in Figure below. The steel is AISI 1020 hot-rolled. Calculate (a) the maximum shear stress and (b) the total angle of twist. If a shaft is subjected to several different torques, or the cross sectional area or shear modulus changes abruptly from one segment of the shaft to the next, the relationship for twist angle can be applied to each segment of the shaft. The total angle of twist for the entire shaft is found from vector addition of the twist angle of each segment. To determine the direction of rotation accompanying the twist angle formula, note the TL formula JG provides the amount of twist of the end of the shaft at which the calculations are initiated relative to the end to which the calculations proceeded. Consequently to determine the direction of rotation of the starting point relative to the ending point, proceed as follows. TL JG 1) Calculate Note if T is negative in an interval L of the shaft, then the accompanying φ will be negative. 2) Place right hand at end of shaft at which the calculations were initiated. 3) To determine the direction of rotation of the end of the shaft from which calculations were initiated perform the following a) if φ as calculated in step 1 is negative, orientate thumb of right hand toward shaft. Fingers of right hand curl in direction of rotation. b) if φ as calculated in step 2 is positive, orientate thumb of right hand away from shaft. Fingers of right hand curl in direction of rotation. Example: The gears attached to the fixed-end steel shaft are subjected to the torques shown in figure. If the shear modulus of elasticity is G=80GPa and the shaft has a diameter of 14 mm, determine the displacement of the tooth P on gear A. The shaft turns freely within the bearing at B. Assuming J 3.77109 m4 G 80109 JG 3.77109 80109 3.02102 Find A TL TL JG 3.02 10 2 A Note: A will be a negative number. Accordingly due to method of establishing sign convention for angles, point A will rotate as shown below. Fill in value for angle.