N 2 =N 4
advertisement

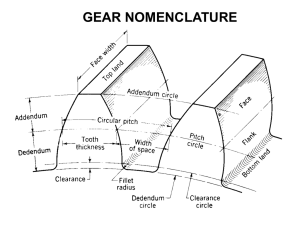
MENG 372 Chapter 9 Gears All figures taken from Design of Machinery, 3rd ed. Robert Norton 2003 Rolling Cylinders • Gear analysis is based on rolling cylinders • External gears rotate in opposite directions • Internal gears rotate in same direction Gear Types • Internal and external gears • Two gears together are called a gearset Fundamental Law of Gearing • The angular velocity ratio between 2 meshing gears remains constant throughout the mesh • Angular velocity ratio (mV) • Torque ratio (mT) is mechanical advantage (mA) Input v ωr ωinrin ωout rout Output ωout rin din mV ωin rout d out ωin rout d out mT ωout rin din Involute Tooth Shape • Shape of the gear tooth is the involute curve. • Shape you get by unwrapping a string from around a circle • Allows the fundamental law of gearing to be followed even if center distance is not maintained Meshing Action Contact Geometry • Pressure angle (f): angle between force and motion Fundamental Law of Gearing • The common normal of the tooth profiles, at all contact points within the mesh, must always pass through a fixed point on the line of centers, called the pitch point Change in Center Distance • With the involute tooth form, the fundamental law of gearing is followed, even if the center distance changes • Pressure angle increases Backlash • Backlash – the clearance between mating teeth measured at the pitch circle • Whenever torque changes sign, teeth will move from one side of contact to another • Can cause an error in position • Backlash increases with increase in center distance • Can have anti-backlash gears (two gears, back to back) Gear Tooth Nomenclature • Circular Pitch, pc=pd/N • Diametral Pitch (in 1/inch), pd=N/d=p/pc • Module (in mm), m=d/N Interference and Undercutting • Interference – If there are too few pinion teeth, then the gear cannot turn • Undercutting – part of the pinion tooth is removed in the manufacturing process For no undercutting f (deg) Min # teeth 14.5 20 25 32 18 12 Gear Types • • • • • • Spur Gears Helical Gears (open or crossed) Herringbone Gears Worm Gears Rack and Pinion Bevel Gears Spur Gears • Straight teeth • Noisy since all of the tooth contacts at one time • Low Cost • High efficiency (9899%) Helical Gears • • • • Slanted teeth to smooth contact Axis can be parallel or crossed Has a thrust force Efficiency of 96-98% for parallel and 50-90% for crossed Crossed Helical Gears Herringbone Gears • Eliminate the thrust force • 95% efficient • Very expensive Rack and Pinion • Generates linear motion • Teeth are straight (one way to cut a involute form) Worm Gears • • • • Worm gear has one or two teeth High gear ratio Impossible to back drive 40-85% efficient Bevel Gears • Based on rolling cones • Need to share a common tip Other Gear Types • Noncircular gears – give a different velocity ratio at different angles • Synchronous belts and sprockets – like pulleys (98% efficient) Simple Gear Trains N 2 N3 N 4 N5 ωout ωin N3 N 4 N5 N 6 N2 ωin N6 • Maximum gear ratio of 1:10 based on size constraints • Gear ratios cancel each other out • Useful for changing direction • Could change direction with belt Compound Gear Trains • More than 1 gear on a shaft • Allows for larger gear train ratios ωout N 2 N 4 ωin N3 N5 Compound Train Design ωin 2 4 3 5 2 stages ωout N 2 N 4 ωin ωout N3 N5 If N2=N4 and N3=N5 ωin N3 ωout N 2 2 N2 ωin ωout N3 2 Reduction ratio Will be used to determine the no. of stages given a reduction ratio Compound Train Design • • • • Design train with gear ratio of 180:1 Two stages have ratio 180 13.4164too large N3 3 3 Three stages has ratio 180 5.646 180 5.646 N2 At 14 teeth Pinion Teeth * ratio Gear teeth actual ratio is 3 79 179.6789 14 • OK for power transmission; not for phasing 12 5.646 67.7546 13 5.646 73.4008 14 5.646 79.0470 15 5.646 84.6932 16 5.646 90.3395 Compound Train Design: Exact RR •Factor desired ratio: 180=22x32x5 • Want to keep each ratio about the same (i.e. 6x6x5) • 14x6=84 • 14x5=70 • Total ratio 2 70 84 180 14 14 We could have used: 180=2x90=2x2x45=2x2x5x9=4x5x9 or 4.5x6x(20/3) etc. Manual Transmission Manual Synchromesh Transmission Based on reverted compound gears Reverted Compound Train • Input and output shafts are aligned • For reverted gear trains: R2+R3=R4+R5 D2+D3=D4+D5 N2+N3=N4+N5 • Gear ratio is ωout N 2 N 4 ωin N3 N5 Commercial three stage reverted compound train Design a reverted compound gear train for a gear ratio of 18:1 N3 N5 18=3x6 N3=6N2, N5=3N4 18 N 2 N 4 N2+N3=N4+N5=constant N5 N3 N2+6N2=N4+3N4=C 6 N 3 7N2=4N4=C 4 N2 Take C=28, then N2=4, N4=7 This is too small for a gear! Choose C=28x4=112 (say) • N2=16, N3=96, • N4=28, N5=84 Planetary or Epicyclic Gears • Conventional gearset has one DOF • If you remove the ground at gear 3, it has two DOF • It is difficult to access w3 Planetary Gearset with Fixed Ring Planetary Gearset with Fixed Arm Planetary Gearset with Ring Gear Output • Two inputs (sun and arm) and one output (ring) all on concentric shafts Different Epicyclic Configurations Gear plots are about axis of rotation/symmetry bearing Ring (internal) teeth Axis of symmetry Sun (external) Compound Epicycloidal Gear Train • Which picture is this? Tabular Method For Velocity Analysis • Basic equation: wgear=warm+wgear/arm • Gear ratios apply to the relative angular velocities Gear# wgear= warm wgear/arm Gear ratio Example Given: Sun gear N2=40 teeth Planet gear N3=20 teeth Ring gear N4=80 teeth warm=200 rpm clockwise wsun=100 rpm clockwise Required: Ring gear velocity wring Tabular Method For Velocity Analysis Sign convention: N2=40, N3=20, N4=80 warm= -200 rpm (clockwise) Clockwise is negative (-) wsun= -100 rpm (clockwise) Anti-clockwise is positive(+) Gear# wgear= warm+ 2 -100 -200 100 3 - 400 -200 -200 4 -250 -200 -50 w4= - 250 rpm wgear/arm Gear ratio 40 20 20 80 Tabular Method For Velocity Analysis • N2=40, N3=20, N4=30, N5=90 • warm=-100, wsun=200 Gear# wgear= wwarm arm+ wgear/arm Gear ratio #2 200 -100 300 -40 20 #3 -100 -600 1 #4 -100 -600 30 90 #5 -300 -100 -200 Equation Method For Velocity Analysis ωout w arm product of driver gears ωin w arm product of driven gears • N2=40, N3=20, N4=30, N5=90 • warm=-100rpm, wsun=200 ωout 100 (-40)(30) 200 100 (20)(90) 12 w out 300 100 300 18