Lecture-5-Optics
advertisement

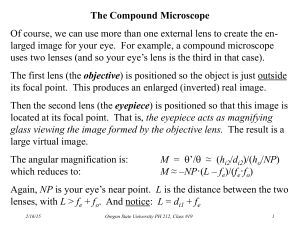
Consider Refraction at Spherical Surfaces: Starting point for the development of lens equations Vast majority of quality lenses that are used today have segments containing spherical shapes. The aim is to use refraction at surfaces to simultaneously image a large number of object points which may emit at different wavelengths. Point V (Vertex) sO SV (object distance) si VP (image distance) i - Angle of incidence t - Angle of refraction r - Angle of reflection The ray SA emitted from point S will strike the surface at A, refract towards the normal, resulting in the ray AP in the second medium (n2) and strike the point P. All rays emerging from point S and striking the surface at the same angle i will be refracted and converge at the same point P. Let’s return to Fermat’s Principal d OPL 0 with OPL n1 lo n2li dx Using the Law of cosines: lo2 R 2 so R 2 Rso R cos 2 l R s R 2 Rs R cos lo R so R 2 Rso R cos and 2 2 2 2 i i with cos( ) cos i 1/ 2 1/ 2 Therefore, with OPL n1lo n2li OPL n1 R so R 2 Rso R cos 2 2 n2 R si R 2 Rsi R cos 2 2 1/ 2 1/ 2 Note: Si, So, R are all positive variables here. Now, we can let d(OPL)/d = 0 to determine the path of least time. Then the derivative becomes 1 / 2 d (OPL) 1 2 2 n1 R so R 2 Rso R cos 2 Rso R sin d 2 1 / 2 1 2 2 2 R(si R) sin 0 n2 R si R 2 Rsi R cos 2 We can express this result in terms of the original variables lo and li: n1 Rso R sin n2 Rsi R sin 0 and lo li n1 n2 1 n2 si n1so lo li R li lo However, if the point A on the surface changes, then the new ray will not intercept the optical axis at point P. Assume new small vaules of the radial angle so that cos 1, lo so, and li si. Again, subscripts o and i n1 n2 n2 n1 then refer to object and image so si R locations, respectively. This is known as the first-order theory, and involves a paraxial approximation. The field of Gaussian Optics utilizes this approach. Note that we could have also started with Snell’s law: n1sin 1= n2sin2 and used sin . Using spherical (convex) surfaces for imaging and focusing Object focus i) Spherical waves from the object focus refracted into plane waves. Suppose that a point at fo is imaged at a point very far away (i.e., si = ). so fo = object focal length n1 n2 n2 n1 then so R n1 n2 n1 fo R n1 fo R n2 n1 ii) Plane waves refracted into spherical waves. Suppose now that plane waves (parallel rays) are incident from a point emitting light from a point very far away (i.e., so = ). when so n1 n2 n2 n1 si R n2 n2 n1 si R n2 f i si R n2 n1 Diverging rays revealing a virtual image point using concave spherical surfaces. Virtual image point n2 f i si R n2 n1 Signs of variables are important. R<0 fi < 0 si < 0 Parallel rays impinging on a concave surface. The refracted rays diverge and appear to emanate from the virtual focal point Fi. The image is therefore virtual since rays are diverging from it. A virtual object point resulting from converging rays. Rays converging from the left strike the concave surface and are refracted such that they are parallel to the optical axis. An object is virtual when the rays converge toward it. so < 0 here. when si n1 n2 n2 n1 so si R n1 n2 n1 so R n1 f o so R 0 n2 n1 The combination of various surfaces of thin lenses will determine the signs of the corresponding spherical radii. S (a) (b) (c) As the object distance so is gradually reduced, the conjugate image point P gradually changes from real to virtual. The point P’ indicates the position of the virtual image point that would be observed if we were standing in the glass medium looking towards S. We will use virtual image points to locate conjugate image points. In the paraxial approximation: (A) nm nl nl nm so1 si1 R1 n1 n2 n2 n1 from so si R The 2nd surface “sees” rays coming towards it from the P’ (virtual image point) which becomes the 2nd object point for the 2nd surface. Therefore so2 si1 d , so2 Thus, at the 2nd surface: so2 , (B) si1 si1 , so2 si1 d nl nm nm nl si1 d si 2 R2 Add Equations (A) & (B) 1 1 nm nm nl d nl nm so1 si 2 R1 R2 si1 d si1 Let d 0 (this is the thin lens approximation) and nm 1: 1 1 1 1 nl 1 (c) so si R1 R2 and is known as the thin-lens equation, or the Lens maker’s formula, in which so1 = so and si2 = si, V1 V2, and d 0. Also note that lim si f i , so For a thin lens (c) fi = fo = f and Convex f > 0 Concave f < 0 lim so f o si 1 1 1 nl 1 f R1 R2 Also, known as the Gaussian lens formula 1 1 1 so si f Location of focal lengths for converging and diverging lenses nl nlm 1 nm nl nlm 1 nm If a lens is immersed in a medium with nl nlm nm 1 1 1 nlm 1 f R1 R2 f Object 2f 2f Real image f Convex thin lens Simplest example showing symmetry in which so = 2f si = 2f 2 f Object f so si Concave, f < 0, image is upright and virtual, |si| < |f| 1 3 Virtual image Note that a ray passing through the center is drawn as a straight line. Ideal behavior of 2 sets of parallel rays; all sets of parallel rays are focused on one focal plane. 1 1 1 so si f si f so so f 1 1 1 si f so f 1 where so f , 1 For case (b) below si f , si 0 Tracing a few key rays through a positive and negative lens Consider the Newtonian form of the lens equations. S2 yo S1 From the geometry of similar triangles: so yo , si yi 1 1 1 f so si 1 1 1 f xo f xi f xo f f 1 f xo f xi f f2 f xi f xo f xo f x xo i f xo xi f 2 Newtonian Form: xo > 0 if the object is to the left of Fo. xi > 0 if the image is to the right of Fi. The result is that the object and image must be on the opposite sides of their respective focal points. Define Transverse (or Lateral) Magnification: yi si xi f f 2 / xo f f f / xo 1xo MT xo f xo yo so xo f xo f xi f xo f Image forming behavior of a thin positive lens. f 2f f 2f MT > 0 Erect image and MT < 0 Inverted image. All real images for a thin lens will be inverted. Simplest example 2f-2f conjugate imaging gives MT f f 1 xo f f 2f f 2f Define Longitudinal Magnification, ML dxi ML dxo f2 and xi xo f2 M L 2 M T2 0 xo This implies that a positive dxo corresponds to a negative dxi and vice versa. In other words, a finger pointing toward the lens is imaged pointing away from it as shown on the next slide. The number-2 ray entering the lens parallel to the central axis limits the image height. Image orientation for a thin lens: The transverse magnification (MT) is different from the longitudinal magnification (ML). (a) The effect of placing a second lens L2 within the focal length of a positive lens L1. (b) when L2 is positive, its presence adds convergence to the bundle of rays. (c) When L2 is negative, it adds divergence to the bundle of rays. Two thin lenses separated by a distance smaller than either focal length. Note that d < si1, so that the object for Lens 2 (L2) is virtual. Note the additional convergence caused by L2 so that the final image is closer to the object. The addition of ray 4 enables the final image to be located graphically. Note that d > si1, so that the object for Lens 2 (L2) is real. Fig. 5.30 Two thin lenses separated by a distance greater than the sum of their focal lengths. Because the intermediate image is real, you could start with point Pi’ and treat it as if it were a real object point for L2. Therefore, a ray from Pi’ through Fo2 would arrive at P1. so1 f1 1 1 1 , si1 si1 f1 so1 so1 f1 so 2 d si1 so 2 0 (virtual) so 2 0 (real) For the compound lens system, so1 is the object distance and si2 is the image distance. f 2 so1 f1 f 2d so 2 f 2 d si1 f 2 so1 f1 1 1 1 , si 2 si 2 f 2 so 2 so 2 f 2 d si1 f 2 d f so1 f1 2 so1 f1 The total transverse magnification (MT) is given by M T M T 1M T 2 si1 si 2 f1si 2 so1 so 2 d so1 f1 so1 f1 For this two lens system, let’s determine the front focal length (ffl) f1 and the back focal length (bfl) f2. Let si2 then this gives so2 f2. so2 = d – si1 = f2 si1 = d – f2 but 1 1 1 1 1 f1 si1 f1 d f 2 S o1 si 2 ffl so1 si 2 f1 d f 2 d f1 f 2 From the previous slide, we calculated si2. Therefore, if so1 we get, f 2 d f 2 f1 f 2 d f1 bfl si 2 d f 2 f1 d f 2 f1 f 2 f1 for d 0, bfl ffl f ef f 2 f1 1 1 1 f ef f1 f 2 fef = “effective focal length” Suppose that we have in general a system of N lenses whose thicknesses are small and each lens is placed in contact with its neighbor. 1 2 3 ………N Then, in the thin lens approximation: 1 1 1 1 1 ... f ef f1 f 2 f 3 f N Fig. 5.31 A positive and negative thin lens combination for a system having a large spacing between the lenses. Parallel rays impinging on the first lens enable the position of the bfl. Example B Example A Example A: Two identical converging (convex) lenses have f1 = f2 = +15 cm and separated by d = 6 cm. so1 = 10 cm. Find the position and magnification of the final image. 1 1 1 so1 si1 f1 si1 = -30 cm at (O’) which is virtual and erect Then so2 = |si1| + d = 30 cm + 6 cm = 36 cm 1 1 1 so 2 si 2 f 2 si2 = i’ = +26 cm at I’ Thus, the image is real and inverted. The magnification is given by M T M T 1M T 2 si1 si 2 30 26 2.17 so1 so 2 10 36 Thus, an object of height yo1 = 1 cm has an image height of yi2 = -2.17cm Example B: f1= +12 cm, f2 = -32 cm, d = 22 cm An object is placed 18 cm to the left of the first lens (so1 = 18 cm). Find the location and magnification of the final image. 1 1 1 so1 si1 f1 si1 = +36 cm in back of the second lens, and thus creates a virtual object for the second lens. Image is real and Inverted so2 = -|36 cm – 22 cm| = -14 cm 1 1 1 si2 = i’ = +25 cm; The magnification is given by so 2 si 2 f 2 Thus, if yo1 = 1 si1 si 2 36 25 M T M T 1M T 2 3.57 cm this gives yi2 = -3.57 cm so1 so 2 18 14