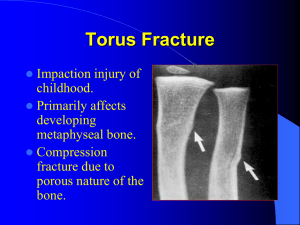
Modeling Fracture in Elastic-plastic Solids Using Cohesive Zone
advertisement

Modeling Fracture in Elastic-plastic
Solids Using Cohesive Zone
CHANDRAKANTH SHET
Department of Mechanical Engineering
FAMU-FSU College of Engineering
Florida State University
Tallahassee, Fl-32310
Sponsored by
US ARO, US Air Force
Fracture/Damage theories to model failure
Fracture Mechanics Linear solutions leads to singular fieldsdifficult to evaluate
Fracture criteria based on K , G , J , C T O D , ...
Non-linear domain- solutions are not
unique
Additional criteria are required for crack
initiation and propagation
IC
IC
IC
Basic breakdown of the principles of
mechanics of continuous media
Damage mechanics can effectively reduce the strength and
stiffness of the material in an average
sense, but cannot create new surface
D 1
E
E
, E ffective stress =
1 D
CZM is an Alternative method to Model Separation
CZM can create new surfaces. Maintains continuity conditions mathematically, despite
the physical separation.
CZM represent physics of fracture process at the atomic scale.
It can also be perceived at the meso-scale as the effect of energy dissipation mechanisms,
energy dissipated both in the forward and the wake regions of the crack tip.
Uses fracture energy(obtained from fracture tests) as a parameter and is devoid of any
ad-hoc criteria for fracture initiation and propagation.
Eliminates singularity of stress and limits it to the cohesive strength of the the material.
Ideal framework to model strength, stiffness and failure in an integrated manner.
Applications: geomaterials, biomaterials, concrete, metallics, composites…
Conceptual Framework of Cohesive Zone Models for interfaces
t1
*
t1
*
u1
*
u1
x (X , t )
1
s1
s
s2
nˆ
1
(a)
(d)
P
nˆ 1
nˆ 2
d,T d n
P
P
S
dt
*
X , x
2
t2
u2
3
X , x
*
2
X , x
1
dmax
N
*
max
(c)
S1
P
Tn
1
P
3
*
2
2
1
*
u2
2
(b )
2
is a n in te r fa c e s u rfa c e s e p a ra tin g tw o d o m a in s 1 , 2
(id e n tic a l/ s e p a ra te c o n s titu tiv e b e h a v io r).
A fte r fr a c tu r e th e s u rfa c e S c o m p r is e o f u n s e p a ra te d s u rfa c e a n d
c o m p le te ly s e p a r a te d s u r fa c e (e .g . ); a ll m o d e le d w ith in th e c o n S
cept of C ZM .
S u c h a n a p p ro a c h is n o t p o s s ib le in c o n v e n tio n a l m e c h a n ic s o f c o n tin u o u s m e d ia .
dsep
Interface in the undeformed configuration
1 and 2 are separated by a com m on boundary S ,
t1
*
*
u1
such that
1
S 1 1 and S 2 2
and norm als
N 1 1 and N 2 2
s1
s
H ence in the initial configuration
N
P
s2
S S1 S 2
N N1 N 2
*
t2
2
S defines the interface betw een any tw o d om ains
*
X , x
1 is m etal, 2 is ceram ic,
3
u2
3
X , x
1
S = m etal ceram ic interface
1 , 2 represent grains in different orientation,
S = grain boundary
1 , 2 represent sam e dom ain ( 1 2 = ),
S = internal surface yet to separate
(a)
X , x
2
1
2
Interface in the deformed configuration
A fter deform ation a m aterial point X
m oves to a new location x, such that
t1
*
*
u1
x ( X ,t)
1
if the interface S separates, then a pair of new
S1
surface S 1 and S 2 are created bounding
nˆ
P
a new do m ain such that
*
*
P
S
N m oves to nˆ
2
2
(S 1 , N 1 ) m oves to ( S 1 , nˆ1 ) ( S 1 1 )
*
dt
(S 2 , N 2 ) m oves to ( S 2 , nˆ 2 ) ( S 2 2 )
*
can be considered as 3-D dom ain m ade of
*
extrem ely soft glue, w hich can be shrunk to an
i nfinitesim ally thin surface but can be e xpanded
into a 3-D dom ain.
(d)
P
nˆ 1
nˆ 2
d,T d n
P
*
u2
1
2
(b )
Constitutive Model for Bounding Domains 1,2
A fter deform ation, given by x ( X ,t), if v is the velocity vector,
T hen velocity gradient L is given by
L
v
x
D ecom posing L into a sym m etric part D an d antisym m etri c part W
L D W
such that
D
W here,
1
2
( L L ) and W = 12 ( L L )
T
T
D is the rate of deform ation tensor, and W is the spin tensor
E xtending hypo-elastic form ulation to inelastic m aterial by
additive decom position of the rate of de form ation tensor
D D
w here D
El
and D
In
El
D
In
are elastic and inelastic part of the rate of deform ati on tensor
T he constitutive m odel for the dom ains 1 and 2 can be w ritten as
C (D D
In
)
w here C is elasticity tensor, and Jau m ann rate of cauchy stress tensor.
Constitutive Model for Cohesive Zone
t1
*
*
u1
A typical constitutive relation for
*
Tn
1
is given by T - d relation such that
(c)
S1
if d d sep ,
nˆ T
(d)
and
d,T d n
P
if d d sep , nˆ T 0
It can be construed that w hen d d sep
in the dom ain , the stiffness C ijkl 0.
*
P
dt
P
nˆ 1
nˆ 2
S
1
dmax
nˆ
P
*
max
2
2
2
*
u2
(b )
dsep
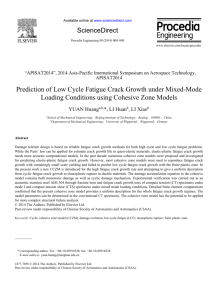
Development of CZ Models-Historical Review
Figure (a) Variation of Cohesive
traction (b) I - inner region,
II - edge region
Barenblatt (1959) was
first to propose the concept
of Cohesive zone model to
brittle fracture
Molecular force of cohesion acting near the edge of the crack at its surface (region II ).
The intensity of molecular force of cohesion ‘f ’ is found to vary as shown in Fig.a.
The interatomic force is initially zero when the atomic planes are separated by normal
intermolecular distance and increases to high maximum f m E T o / b E / 10 after that
it rapidly reduces to zero with increase in separation distance.
E is Young’s modulus and T ois surface tension
(Barenblatt, G.I, (1959), PMM (23) p. 434)
Phenomenological Models
The theory of CZM is based on sound principles.
However implementation of model for practical problems grew exponentially for
practical problems with use of FEM and advent of fast computing.
Model has been recast as a phenomenological one for a number of systems and
boundary value problems.
The phenomenological models can model the separation process but not the effect of
atomic discreteness.
Hillerborg etal. 1976 Ficticious
crack model; concrete
Bazant etal.1983 crack band
theory; concrete
Morgan etal. 1997 earthquake
rupture propagation; geomaterial
Planas etal,1991, concrete
Eisenmenger,2001, stone fragmentation squeezing" by evanescent
waves; brittle-bio materials
Amruthraj etal.,1995, composites
Grujicic, 1999, fracture behavior of polycrystalline; bicrystals
Costanzo etal;1998, dynamic fr.
Ghosh 2000, Interfacial debonding; composites
Rahulkumar 2000 viscoelastic
fracture; polymers
Liechti 2001Mixed-mode, timedepend. rubber/metal debonding
Ravichander, 2001, fatigue
Tevergaard 1992 particle-matrix
interface debonding
Tvergaard etal 1996 elasticplastic solid :ductile frac.; metals
Brocks 2001crack growth in
sheet metal
Camacho &ortiz;1996,impact
Dollar; 1993Interfacial
debonding ceramic-matrix comp
Lokhandwalla 2000, urinary
stones; biomaterials
Fracture process zone and CZM
CZM essentially models fracture process zone
Mathematical
crack tip
by a line or a plane ahead of the crack tip
Material
crack tip
subjected to cohesive traction.
The constitutive behavior is given by traction y
displacement relation, obtained by defining
potential function of the type
n , t1 , t 2
x
where n , t1 , t 2 are normal and tangential
displacement jump
The interface tractions are given by
Tn
n
, T t1
t1
, Tt 2
t 2
Following the work of Xu and Needleman (1993), the
interface potential is taken as
n, t
n
n 1 q
n n exp
1 r
d n r 1
dn
where q t /
r *n / d n
r q n
2t
q
exp 2
dt
r 1 d n
d n , d t are some characteristic distance
*n
Normal displacement after shear separation under the condition
Of zero normal tension
Normal and shear traction are given by
n
n
Tn
exp
dn
dn
n
d
n
2 t 1 q
2t
n
r
exp 2
1 exp 2
d n
d t r 1
dt
r q n
2t
n t 2 d n
n
Tt
exp
exp 2
q
d n d t d t
dn
dt
r 1 d n
Dissipative Micromechanisims Acting in the wake and forward
region of the process zone at the Interfaces of
Monolithic and Heterogeneous Material
Wake of crack tip
ˆ
Fibril (MMC bridging
max
Microvoid
coalescence
C
Forward of crack tip
Plastic
zone
Metallic
Cleavage
fracture
Grain bridging
y
Oxide bridging
D
B
NO MATERIAL
SEPARATION
LOCATION OF COHESIVE
CRACK TIP
COMPLETE MATERIAL
SEPARATION
E
A
d max
l1
dD
d, X
d sep
l2
WAKE
FORWARD
Thickness of
ceramic interface
Crack Meandering
Plastic wake
Fibril(polymers)
bridging
Intrinsic dissipation
MATERIAL
CRACK TIP
MATHEMATICAL
CRACK TIP
COHESIVE
CRACK TIP
Precipitates
Crack Deflection
Crack Meandering
Ceramic
Extrinsic dissipation
Micro cracking
initiation
Micro void
growth/coalescence
Contact Wedging
INACTIVE PLASTIC ZONE
(Plastic wake)
d sep
E
d D d max
D
WAKE
A
C
Contact Surface
(friction)
Plasticity induced
crack closure
FORWARD
Delamination
Corner atoms
Plastic W ake
Face centered
atoms
FCC
Phase
transformation
y
Corner atoms
ACTIVE PLASTIC ZONE
Cyclic load induced
crack closure
x
ELASTIC SINGULARITY ZONE
Concept of wake and forward region in the
cohesive process zone
BCC
Body centered
atoms
Inter/trans granular
fracture
Active dissipation mechanisims participating at the cohesive process zone
Numerical Formulation
• The numerical implementation of CZM for interface
modeling with in implicit FEM is accomplished developing
cohesive elements
• Cohesive elements are developed either as line elements
(2D) or planar elements (3D)abutting bulk elements on
either side, with zero thickness
1
• The virtual work due to cohesive zone traction in a
given cohesive element can be written as
d
dS
T d
n
Continuum
elements
3
5
2
4
6
7
8
Cohesive
element
n T t d t dS
The virtual displacement jump is written as d [ N ]{d v}
Where [N]=nodal shape function matrix, {v}=nodal displacement vector
d
dS { d v}
T
[ N ]
s
T
d{T n } [ N ] d{T t } 1J dS
T
J = Jacobian of the transformation between the current deformed
and original undeformed areas of cohesive surfaces
Note: T is written as d{T}- the incremental traction, ignoring time
which is a pseudo quantity for rate independent material
Numerical formulation contd
The incremental tractions are related to incremental displacement jumps
across a cohesive element face through a material Jacobian matrix as
d{T} [C cz }d{ }
For two and three dimensional analysis Jacobian matrix is given by
T n n
[C cz ]
T t n
T n t
T t t
T n n
[C cz ] T t1 n
T t 2 n
T n t1
T t1 t1
T t 2 t1
T n t 2
T t1 t 2
T t 2 t 2
Finally substituting the incremental tractions in terms of incremental
displacements jumps, and writing the displacement jumps by means of
nodal displacement vector through shape function, the tangent stiffness
matrix takes the form
[K T ]
[N ]
s
T
[C cz ][ N ] 1J dS