Chapter 2
advertisement

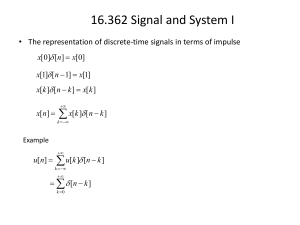
Linear Time-Invariant Systems • Discrete-Time LTI Systems: Convolution Sum • Continuous-Time LTI Systems: Convolution Integral • Properties of LTI Systems • Causal LTI Systems Described by – Differential and Difference Equations • Singularity Functions Discrete-Time LTI Systems • Representation of Discrete-Time Signals in Terms of Impulses • Discrete-Time Unit Impulse Response and the Convolution-Sum Representation Representation of Discrete-Time Signals in Terms of Impulses Discrete-time unit impulse, any discrete-time signal , can be used to construct Discrete-time signal is a sequence of individual impulses Consider x[n] • 5 time shifted impulses scaled by x[n] • Therefore • x[n] = x[-3]δ[n+3] + x[-2]δ[n+2] + x[-1]δ[n+2] + x0]δ[n] + x[1]δ[n-1] + x[2]δ[n-2] + x[3]δ[n-3] • or • Represents arbitrary sequence as linear combination of shifted unit impulses δ[n-k], where the weights are x[k] • Often called the Sifting Property of Discrete-Time unit impulse – Because δ[n-k] is nonzero only when k = n the summation “sifts” through the sequence of values x[k] and preserves only the value corresponding to k = n Discrete-Time Unit Impulse Response and the Convolution-Sum Representation • Sifting property represents x[n] as a superposition of scaled versions of very simple functions – shifted unit impulses, δ[n-k], each of which is nonzero at a single point in time specified by the corresponding value of k • Response of Linear system will be – Superposition of scaled responses of the system to each shifted impulse • Time Invariance tells us that – Responses of a time-invariant system to – time-shifted unit impulses are – time-shifted versions of one another • Convolution-Sum representation for D-T LTI systems is based on these two facts Convolution-sum Representation of LTI Systems • Consider response of linear system to x[n] • says input can be represented as linear combination of shifted unit impulses • let hk[n] denote response of linear system to shifted unit impulse δ[n-k] • Superposition property of a linear system says the response y[n] of the linear system to x[n] is weighted linear combination of these responses • with input x[n] to a linear system the output y[n] can be expressed as If x[n] is applied to a system Whose responses h-1[n], h0[n], and h1[n] to the signals δ[n+1], δ[n], and δ[n-1] are Superposition allows us to write the response to x[n] as a linear combination of the responses to the individual shifted impulses x[n] system response to δ[n+1], δ[n], δ[n-1] Continuous-Time LTI Systems: Convolution Integral • Representation of Continuous-Time Signals in Terms of Impulses • Continous-Time Unit Impulse Response and the Convolution Integral Representation of LTI Systems Properties of LTI Systems • • • • • • • • Commutative Property Distributive Property Associative Property LTI Systems with and without Memory Invertibility of LTI Systems Causality of LTI Systems Stability for LTI Systems Unit Step Response of an LTI System Causal LTI Systems Described by Differential and Difference Equations • Linear Constant-Coefficient Differential Equations • Linear Constant-Coefficient Difference Equations • Block Diagram Representations of FirstOrder Systems Described by Differential and Difference Equations Singularity Functions • Unit Impulse as an Idealized Short Pulse • Defining the Unit Impulse through Convolution • Unit Doublets and other Singularity Functions