Robot Kinematics: Homogeneous Transformations & Inverse Kinematics
advertisement

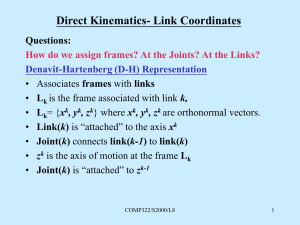
Review: Homogeneous Transformations Homogeneous vector Homogeneous transformation matrix Review: Aim of Direct Kinematics Compute the position and orientation of the end effector as a function of the joint variables Review: Direct Kinematics The direct kinematics function is expressed by the homogeneous transformation matrix Review: Open Chain Computation of direct kinematics function is recursive and systematic artenberg Convention -H Convention Class Problem: Spherical Wrist 1. Fill in the table of D-H parameters for the spherical wrist. 2. write the three D-H transformation matrices (one for each joint) for the spherical wrist 3. Find the overall transformation matrix which relates the final coordinates (x6y6z6) to the “base” coordinates (x3y3z3) for the spherical wrist -H Convention Operational Space Description of end-effector task position: coordinates (easy) w.r.t base frame orientation: (n s a) (difficult) Function of time Operational space Independent variables Joint space Prismatic: d Revolute: theta Operational Space Direct kinematics equation x k ( q ), x R ,q R m Three-link planar arm n (Pp50 2-58) k (q) ? mn m6 Operational Space Generally not easy to express Operational Space Workspace Factors determining workspace reachable workspace Manipulator geometry dexterous workspace Mechanical joint limits Mathematical description of workspace Workspace is finite, closed, connected ce Example exes of Manipulator Accuracy of manipulator Deviation between the reached position and the position computed via direct kinematics. repeatability of manipulator A measure of the ability to return to a previously reached position. c Redundancy Definition A manipulator is termed kinematically redundant when it has a number of degrees of mobility which is greater than the number of variables that are necessary to describe a given task. c Redundancy Intrinsic redundancy m<n functional redundancy relative to the task Why to intentionally utilize redundancy? c Calibration Kinematic calibration techniques are devoted to finding accurate estimates of D-H parameters from a series of measurements on the manipulator’s end-effector location. Direct measurement of D-H is not allowed. e Kinematics e Kinematics we know the desired “world” or “base” coordinates for we need to compute the set of joint coordinates that w the inverse kinematics problem is much more difficult se Kinematics there is no general purpose technique that will guaran Multiple solutions may exist Infinite solutions may exist, e.g., in the case of redund There might be no admissible solutions (condition: x i se Kinematics most solution techniques (particularly the one shown Numerical solution techniques may be applied to all p link Planar Arm x is known, compute q link Planar Arm W can be expressed both as a function of end-effector p&o, and as a function of a reduced number of joint variables Class problem Two-link planar arm 1 , 2 one-link planar arm 3 link Planar Arm Algebraic approach link Planar Arm no admissible solution If c2 is out of this range Elbow up and elbow down link Planar Arm link Planar Arm Geometric approach l ? =? =? i ? Feasible condition: a1+a2>l and |a1a2|<l l Class Problem what are the forward and inverse kinematics equations for the two-link planar robot shown on the right? Attention: m= ? Y0 90 deg 2nd Joint: Prismatic 1st Joint: Revolute X0