Nonlinear Controller Design Of A Ship Autopilot
advertisement

Nonlinear Controller Design Of A
Ship Autopilot
指導老師:曾慶耀 教授
學
生:呂政倫
學
號:10267041
1
Out line
1.
2.
3.
4.
5.
Introduction
Mathematical model of ship dynamics
Control system for ship course tracking
Simulation test
Conclusion
2
Introduction
A conventional autopilot system used for controlling the
ship motion is a PD controller with constant parameters
values.
These controllers can work properly in precisely defined
operating conditions, but the quality of their work is
worse when these conditions change.
Ship dynamic characteristics can change as a consequence
of changes of the ship speed, load, and external
disturbances such as waves, wind, and/or sea currents.
3
Therefore a lot of research activities have been oriented
to improving the quality of operation of these
controllers using adaptive mechanisms which
automatically change ship model parameters, depending
on operating conditions.
Controllers were tested in calm water and in the
presence of sea waves . Compare the obtained results .
4
Mathematical model of ship
dynamics
Assuming a ship sailing on water surfaces which is
stable in surge and sway directions and 0 .
we can neglect the dynamics of roll 、 pitch and heave.
5
The state variables describing the ship motion are
[
u
,
,
r
]
[
x
,
y
,
]
collected in two vectors,
and
.
R(ψ) is the rotation matrix, calculated from the formula
6
2.1. Mathematical model of CyberShip II:
Cybership II is a scale replica of a supply ship ,made at
a scale of 1:70. Its mass is 23.8 kg, the overall length is
1.255 m, and the breadth is 0.29 m.
The mathematical model of this ship:
The system inertia matrix M M RB M A includes the
rigid-body system inertia matrix M RB ,and the
hydrodynamic matrix included added mass coefficients
MA .
7
The Coriolis-centripetal matrix C(ν) includes Coriolis
and centripetal terms CRB (v) acting on the ship , as well
as hydrodynamic Coriolis and centripetal terms CA (v)
connected with the fluid in which the ship moves .
8
The damping matrix D(v) which consists of the linear
part DL , determined for a selected small and constant
surge velocity , and nonlinear part DNL (v) , determine
hydrodynamic damping forces at high velocities.
9
The vector of forces acting on the ship’s hull refers to
the forces th generated by the propellers and rudders
and to the forces generated by acting disturbances:
2.2. Mathematical models of propellers and rudder
blades
For small speeds, the propeller/blade model can be
divided into two parts, of which the first one
describes the nominal thrust i {1, 2,3} :
10
The second part refers to additional lift and drag forces
the following surge and sway forces are obtained:
11
the vector of forces applied to the hull depending on the
distribution of the propellers and rudder blades:
where the matrix T is the actuator configuration matrix
2.3. Environmental disturbances
(i) waves generated by the wind,
(ii) ocean currents,
(iii) the wind.
[ X , Y , N ] which is directly added to the vector
τ.
12
The wave slope si can be related to the wave S (i )
spectral density function .
13
Control system for ship course
tracking
The input signal in the examined control system was the
desired course d .
To evaluate the quality of operation of the examined
controllers, the cost function was defined as
14
3.1. PD controller
PD controller controls the rudder blade deflection
depending on the values of the heading error and the
yaw rate.
3.2. Sliding mode controller
The output signal of the sliding mode controller, being
the input signal for the controlled object, is composed
of two terms (equivalent part and switching part.)
3.2.1. Equivalent part
The manoeuvring model is obtained which consists of
the surge dynamics
15
16
The parameters of the transfer function are related to the
hydrodynamic coefficients
17
The Nomoto model can be reduced by determining
the substitute time constant using the relation T = T1 +
T2 − T3:
18
The sliding surface h was defined as
the equivalent part of the sliding mode controller
following formula:
where N is the gain to scale the commanded
heading Z ,which is calculated from
19
3.2.2. Switching part
The switching part of sliding mode control takes the
form
3.2.3. Complete form
The control law of the sliding mode controller
20
Comparing Eq: (20) and (43)
PD controller:
The commanded rudder blade deflection only calculated
from the heading error and the yaw rate .
Sliding mode controller:
The commanded rudder blade deflection is calculated
from the course error, the yaw rate, the commanded
yaw rate, and the commanded yaw acceleration.
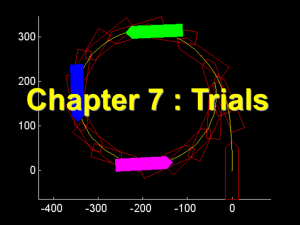
21
Simulation tests
22
23
24
Conclusion
The simulations made conclude that both controllers
properly led the ship in calm water, and similar cost
function values were obtained.
The sliding mode controller better tracks the heading at
the presence of waves than the PD controller.
The advantage of the use of switching in the sliding
algorithm that is helps to keep the current course by
disturbances generated by an external environment .
25
THE END
26
順滑模式:「t = 0,系統狀態X(t)在有限時間內,
被外力所迫,推向順滑平面上(s(x) = 0),且於後
續時間內,系統不再脫離此順滑平面,並沿著順
滑平面向平衡點移動,最終到達系統狀態的目標
值」。
順滑模式的產生,可以歸納出兩個程序:
1.當系統在順滑面之外時,選定順滑函數,使所
有軌跡在有限時間內接觸到順滑面,這個過程稱
為迫近模式。
2.當系統進入後,應保證使系統不再離開並朝平
衡點 x=0 逼近,這個過程稱為等效模式。
27
Switching :將狀態分成3個子空間s(x)>0 、 s(x)<0 和
s(x)=0 ,設計就是要在s(x)=0 空間產生順滑模式。
科氏力:是因地球自轉,而對地表附近的運動(如風、
飛彈、海流等等)所造成的一種偏向力。
向心力:物體做等速率圓周運動,加速度為向心加速度,
方向指向圓心,依F=ma,物體受力(F)方向必和加
速度(a)方向相同,因此合力也指向圓心,稱為向心
力(Fc)。
28