Lecture 02, 28 January 2014
advertisement

The Traveling Salesman Problem
in Theory & Practice
Lecture 2: NP-Hardness
28 January 2014
David S. Johnson
dstiflerj@gmail.com
http://davidsjohnson.net
Seeley Mudd 523, Tuesdays and Fridays
Today’s Outline
• NP-completeness and the complexity of
finding optimal TSP tours.
• Hardness of Approximation, the PCP Theorem,
and the TSP.
Sources
•
Garey & Johnson, Computers and Intractability: A Guide to the
Theory of NP-Completeness, 1979.
•
Johnson & Papadimitriou, “Computational Complexity,” Chapter
3 of Lawler, Lenstra, Rinnooy Kan, & Shmoys, The Traveling
Salesman Problem, 1985.
•
Johnson, “The tale of the second prover” (NP-Completeness
Column #23), J. Algorithms 13 (1992), 502-524 [Also available
on DSJ’s website].
•
Johnson, “A brief history of NP-completeness, 1954-2012,” in
Optimization Stories, Martin Grötschel (Editor), Special Volume
of Documenta Mathematica (2012), 359-376. (Book distributed
at the 21st International Symposium on Mathematical
Programming, Berlin, August 19-24, 2012) [Also available on
DSJ’s website].
NP-Completeness
Concept invented contemporaneously and independently by
Stephen Cook [1971] and Leonid Levin [1973]
Breadth of applicability first illustrated by Karp [1972]
First Book
M. R. Garey & D. S. Johnson
Computers and Intractability: A Guide to the Theory of NP-Completeness
W.H. Freeman, 1979
First Cartoon
Still an Open Question:
Does P = NP?
Note: If you can provide a valid proof of the answer,
you will win fame and fortune ($1,000,000 from the
Clay Institute)
The P-versus-NP Page
http://www.win.tue.nl/~gwoegi/P-versus-NP.htm
Milestones
1
[Equal]: In 1986/87 Ted Swart (University of Guelph) wrote a number of papers (some of them had the title:
"P=NP") that gave linear programming formulations of polynomial size for the Hamiltonian cycle problem. Since
linear programming is polynomially solvable and Hamiltonian cycle is NP-hard, Swart deduced that P=NP. In 1988,
Mihalis Yannakakis closed the discussion with his paper "Expressing combinatorial optimization problems by linear
programs."
27
[Not equal]: In November 2005, Ron Cohen proved that P is not equal to NP. In addition, his paper shows that P is
not equal to the intersection of NP and co-NP. Finally, the exact inclusion relationships between the classes P, NP
and co-NP are discussed. The paper is available at http://www.arxiv.org/abs/cs.CC/0511085. The title of the paper
is "Proving that P is not equal to NP and that P is not equal to the intersection of NP and co-NP".
96
[Unprovable]: In November 2012, Natalia L. Malinina put the paper "On the principal impossibility to prove P=NP"
onto the arxive, at http://arxiv.org/abs/1211.3492. On page 19, she writes: "Summarizing all that was said, it can
be concluded that such dividing of the graphs into three classes and the behavior of the complicated vertexes at the
converting (they turn into the independent cycles) gives us the infallible fact that it is impossible to prove that
P=NP."
98
[Equal]: In January 2013, Dmitriy Nuriyev established P=NP. His paper "A DP Approach to Hamiltonian Path
Problem" designs a polynomial worst case time Dynamic Programming algorithm for computing a Hamiltonian Path
in a directed graph. The result is obtained via the use of original colored hypergraph structures in order to maintain
and update the necessary DP states. The running time of the resulting algorithm is O(n^8) where n denotes the
number of vertices in the directed graph. The paper is available at http://arxiv.org/abs/1301.3093.
49 for Equals, 41 for Not Equals, 1 for both, 3 for Unprovable/Undecidable, 1 for NP=coNP, 3 Others
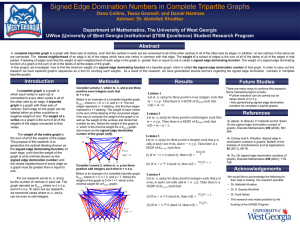
Proving that the TSP is NP-Hard
• What we will actually prove: HAMILTON
CYCLE for “grid graphs” is NP-complete.
Finite subgraph of the infinite rectilinear grid.
General
Asymmetric TSP
Asymmetric Triangle
Inequality TSP
Symmetric
TSP
Directed
Hamilton Cycle
Hamilton
Cycle
Hamilton Cycle for
Bipartite Planar Graphs
Symmetric Triangle
Inequality TSP
Rectilinear
TSP
Hamilton Cycle
for Grid Graphs
Euclidean
TSP
EXACT COVER
• Instance: A finite set U together with a collection C of
subsets of U.
• Question: Does C contain an exact cover for U, that is,
a subcollection S’ ⊆ S such that every element of U
occurs in exactly one member of S’?
• Status: NP-complete [Karp, 1972].
SATISFIABILITY
EXACT COVER
HAMILTON CYCLE for
Bipartite, Max Degree
3 Graphs
HAMILTON CYCLE for
Planar Bipartite, Max
Degree 3 Graphs
HAMILTON CYCLE for
Grid Graphs
SATISFIABILITY
• Instance: A set of X variables {x1,x2,…,xn} and a set of
clauses C = {c1,c2,…,cm}, where each ci is a subset of the
“literals” {x1, ¬x1, x2, ¬x2, … , xn, ¬xn}.
• Question: Is there an assignment of the values “true”
or “false” to the variables so that each clause c
contains at least one true literal (where ¬xi is true if xi
is assigned the value “false” and otherwise is false) ?
• Status: NP-complete [Cook, 1971], [Levin, 1973]
Transformation:
SATISFIABILITY to EXACT COVER
Elements of X:
• <c,x> for each combination of a clause c and a
literal x that it contains.
• Plus |c|-1 auxiliary “garbage collection” elements
for each clause c.
• Plus auxiliary elements for each variable
Clause Component
<c,x3>
<c,¬x6>
<c,¬x7>
<c,x21>
Garbage Collection
Elements
To cover the garbage collection elements, we must pick up all but one of the
<c,x> elements, and all choices of the uncovered <c,x> are possible.
The uncovered <c,x> specifies the literal x chosen to satisfy the clause c.
Need Variable Components to insure that no conflicting literal choices are
made (elements <c,x> and <c’,¬x> are left uncovered).
Variable Component for x
<c2,¬x>
<c7,x>
<c4,¬x>
<c9,x>
<c22,¬x>
<c15,x>
<c11,¬x>
Nx = max(|{c: clause c contains literal x}|, |{c: clause c contains literal ¬x}|)
We begin with 2Nx red elements.
<c2,¬x>
<c7,x>
<c4,¬x>
<c9,x>
<c22,¬x>
<c15,x>
<c11,¬x>
Theorem
The original SATISFIABILITY instance is satisfiable
if and only if
the resulting EXACT COVER instance has an exact cover.
Corollary:
Since the construction can be
accomplished in polynomial time, we have produced
a polynomial reduction from SATISFIABILITY to
EXACT COVER.
EXACT COVER to HAMILTON CIRCUIT
for Bipartite Graphs with Max Degree 3
• The construction involves three types of
components this time.
– Element components
– Set Choosing components
– Linking components
• We will exploit the fact that a tour is 2connected and has only degree-2 vertices.
Component for Element u
Suppose that element u is contained in sets Sa[1], Sa[2], …, Sa[k].
Sa[1] Sa[2]
Sa[k]
Component for Element u
Proposition: Every Hamilton Cycle omits
precisely one of the bottom edges of the
component for u, and any one those bottom
edges can be the omitted one.
(The omitted edge identifies the set that is
supposed to cover element u.)
Proof: We will illustrate the proof for the
case of k = 6
Any one of the bottom edges can be the
omitted one.
(Edges Forced by Degree-2 and 2-Connectivity Constraints)
Every Hamilton Cycle omits precisely one
of the bottom edges.
If none of the edges is omitted, the rest of the component
cannot be in the tour.
Every Hamilton Cycle omits precisely one
of the bottom edges.
Suppose 2 or more edges are omitted.
Consider the leftmost omitted edge.
Tour must contain these edges.
Consider the rightmost omitted edge.
Tour must contain these edges.
Oops!
Set Choosing Components
S1
S2
Sm
A set is in the cover if the Hamilton path takes the
top path in the pair for that set.
Linking Component:
The Exclusive-Or Graph
Only two options for edges
linking to the outside world.
Choice 12
Linking Component:
The Exclusive-Or Graph
Forced
Suppose we
take by
topDegree-2
left edgeConstraints
but not the bottom.
Then these edges are forced.
Linking Component:
The Exclusive-Or Graph
Suppose we take bottom left edge but not the top..
Then these edges are forced.
Linking Component:
The Exclusive-Or Graph
Suppose we take both bottom and top left edges.
Then these edges are forced.
Oops!
Linking Component:
The Exclusive-Or Graph
Suppose we take neither bottom nor top left edge.
Then these edges are forced.
Oops!
Linking Component:
The Exclusive-Or Graph
Shorthand for Exclusive-Or
The Transformation from
Oops!to
–Fixed!
Not
Bipartite
EXACT COVER
HAMILTONIAN
CYCLE
a
{a,b}
b
{a,c}
c
{b}
{b,c}
Adding Planarity: The Crossover
Getting to the Grid
Lemma: Any 2-connected planar graph with f faces and n edges (all of
degree 2 or 3) has an embedding in the 2D grid that can be contained
in square of size 2f+n (has “extent” no more than 2f+n).
Proof of Lemma
• Note that, if a graph is planar, then for each of its faces
there is a planar representation in which that face is the
external face (that is, the one that contains all the other
vertices).
• We proceed by induction on the number of faces f, with
the hypothesis that, for any graph G as above and a
designated face, there is a grid embedding of extent 2f+n
or less, such that
– the designated face is the external face of the embedding, and
– no degree-2 vertex of the external face has any vertex or edge of
the embedding to its right on the gridline containing it.
Base Case: f = 1
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
2f + n = 4 + 6 = 10 > 7
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
Inductive step: Assume true for all f’ < f
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂ ∂
∂ ∂∂
∂ ∂
∂
∂
∂
∂
∂
∂
∂
Chosen Face F
∂
∂
∂ ∂
∂
∂
∂
∂
∂
∂
∂
∂
Planar 2-connected graph G with all vertex degrees equal to 2 or 3
Pick a face F’ that shares an edge with our chosen face.
Delete all shared edges and degree-2 vertices leaving n’ vertices.
Now we have an (f-1)-face graph and a chosen face, for which the induction
hypothesis holds.
∂
∂
Neighboring Face F’
∂
∂
∂
Chosen Face F
∂
∂ ∂
∂
∂ ∂ ∂∂
∂
∂
∂ ∂ ∂
∂
∂
∂
∂
∂
∂
∂
∂
Combined Face F’’
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
Embedding with F’’ as external face.
Extent no more than 2(f-1)+n’
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
Degree 2 vertices on the
boundary of our original face
∂
∂
∂
Two Cases for the boundary of F’’ that is not shared with F:
1. Interior
2. Exterior
First Case: Internal
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
Degree 2edges
vertices
the
Deleted
and on
degree-2
boundaryfrom
of our
vertices
F. original face
∂
∂
∂
Extent no more than 2(f-1)+n’
Extent no more than
2(f-1)+n’ + 1 < 2f+n
First Case: Internal
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
But what if there were many
∂
∂ deleted degree-2 vertices?
∂
∂
∂
∂
∂
∂
∂
∂
∂
Extent no more than 2(f-1) + n’
Extent no more than 2(f-1) + n’ + (n-n’) < 2(f-1) + n
Extent no more than 2(f-1) + n + 1 < 2f + n
2nd Case: External
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
Extent no more than 2(f-1) + n’
Extent no more than 2(f-1) + n’ + (n-n’) < 2(f-1) + n
Extent no more than 2(f-1) + n + 2 < 2f + n
Note that this argument assumes we can always find a neighboring
face that shares only a single path with our chosen face.
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂ F ∂∂
∂
∂
∂∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
No
Yes
∂
∂
∂
Exercise: Show that this is true.
Color-Preserving Embeddings
• If a graph is bipartite, we can two-color its vertices
(say black and white), so that no two adjacent
vertices get the same color.
• Similarly, we can 2-color the vertices of the 2D grid,
where the vertices whose coordinates sum to an even
number get white, and those with odd sum get black.
•
Lemma: If our original planar graph is bipartite, we
can obtain an embedding into the 2D grid is color
preserving.
1.
Embed as before.
2. Multiply the scale by two so that all vertices go to black
grid points
3. Move white vertices one cell to the right, as illustrated
below.
Hardware for the Final Step:
Strips and Tentacles
Endpoints
Endpoints
Endpoints
Lemma: In a tentacle there is a Hamilton path between two endpoints
if and only if one is black and one is white, and our tour must contain
such a path.
Oops!
Tour must contain
paths from this
vertex to one of {a,b}
and to one of {d’,c’}
Each vertex of the
tentacle must be
contained in one of
these paths.
Consequently, the
union of the two
paths makes up a
Hamilton path
between two
endpoints
Two possibilities starting with vertex a
Both go from white to black
Situation is analogous if we start with any other endpoint
Hardware for the Final Step:
The Box
Lemma: for all i,j, 1 ≤ i < j ≤ 4, there is a Hamilton path from pi
to pj containing all four edges e1, e2, e3, and e4.
(For future reference, let the “color” of the box be the color of
the four corner vertices and the central one, in this case white.)
Take our embedding and refine the grid by a factor of 9.
This adds space and maintains vertex color)
Increase the width of edges to a grid cell,
suitably offset
Replace edges with the included grid points
Replace edges with the included grid points
Path must
end in a white
vertex and
hence must
be adjacent
to a corner
of a black
box.
The full construction (with tour)
Historical Notes
• Directed and Undirected HAMILTON CYCLE first proved NPcomplete in [Karp, 1972], with the directed case a
transformation from EXACT COVER, credited to Karp & Tarjan
and the undirected case credited to Tarjan.
• Planar directed HAMILTON PATH was proved NP-complete in
“Some simplified NP-complete problems, Garey, Johnson, &
Stockmeyer, STOC 1974, with journal version in Theor. Comput.
Sci. 1 (1976), 237-267.
• Planar undirected HAMILTON CYCLE for triply-connected cubic
graphs was proved NP-complete in “The planar Hamilton circuit
problem is NP-complete,” Garey, Johnson, & Tarjan, SIAM J.
Comput. 5 (1976), 704-714. [This paper introduced the
exclusive-or and crossover constructions.]
Rectilinear and Euclidean TSP were first
proved NP-hard in
“Some NP-complete geometric problems,”
Garey, Graham, & Johnson, 8th Annual
ACM Symp. on Theory of Computing, 1976,
10-22.
and
“Some complexity results for the
Traveling Salesman Problem,”
Papadimitriou & Steiglitz, 8th Annual ACM
Symp. on Theory of Computing, 1976, 1-9.
[The results were claimed here, with
proof details given in Papadimitriou, “The
Euclidean traveling salesman problem is
NP-complete,” Theor. Comp. Sci. 4 (1977),
237-244.]
From [GGJ 1976]
Hamilton Circuit for Grid Graphs was first
proved NP-complete in “Hamilton paths in
grid graphs,” Itai, Papadimitriou, and
Swarcfiter, SIAM J. Comput. 11 (1982),
676-686.
Coping with Complexity:
Approximation Algorithms
Hardness of Approximation
• First paper proving that for some problems it was just as
hard to get close as to find the optimal solution was by
Sahni & Gonzalez [1974].
• Basic idea: Prove a “gap” theorem.
• Simple example: GRAPH COLORING:
– It is NP-complete to tell whether a graph is 3-colorable.
– Any graph that is not 3-colorable requires at least 4 colors.
– Thus it is NP-hard to determine the chromatic number of a
graph to within a factor r < 4/3.
– Drawback: This proof does not rule out a polynomial-time
algorithm with a guarantee of OPT + 1.
Asymptotic Hardness of
Approximation
∂
∂
∂
∂
∂
∂
∂
∂
∂
H
∂
∂
∂
∂
∂
∂
∂
∂
∂
G
Graph Product G[H]: Replace each vertex v in G by a copy Hv
of H, and if there is an edge between u and v in G, then include
edges between each vertex in Hu and each vertex in Hv.
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
Asymptotic Hardness of
Approximation
• Let G be the graph we wish to test for 3-colorability,
and let Ck be a clique on k vertices.
• Then G[Ck] has chromatic number 3k if G is 3-colorable,
and otherwise has chromatic number at least 4k.
• Since G[Ck] can be constructed in polynomial time for any
fixed k, this implies that GRAPH COLORING cannot be
approximated to within a factor of rOPT + b for any
constant b and r < 4/3 unless P = NP.
• This was improved to r < 2 in Garey & Johnson, “The
complexity of near-optimal graph coloring,” J.ACM 23
(1976), 43-49.
Theoretical Breakthrough (1991,…):
PCP Theorems
• A probabilistically checkable proof (PCP) system for a decision
problem P consists of a polynomial-time “verifier” who behaves
as follows:
• Given an instance of P, a string X to which the verifier has
random access, and k random bits, the verifier determines, in
time polynomial in the instance size, the addresses of b bits of
the proof, and then reads what those bits are.
• If the answer for instance is “yes”, then there is a string X
(possibly exponentially long in terms of the instance size) which
will lead the verifier to say “yes” no matter what her random
bits are.
• If the answer is “no”, then no string can lead her to say “yes”
with probability greater than 0.5.
Theoretical Breakthrough (1991,…):
PCP Theorems
•
Let PCB[f(n),g(n)] be the set of languages that have PCPs that use
k = O(f(n)) random bits and make b = O(g(n)) queries.
•
In 1991, Feige, Goldwasser, Lovasz, Safra, & Szegedy showed that
NP ⊆ PCP[ log(n)loglog(n), log(n)loglog(n) ].
•
Surprisingly, this implies that no approximation algorithm for the
CLIQUE problem can be guaranteed to find a clique of size rOPT + b
or greater for any constants r and b unless NP = DTIME[nO(loglogn)].
•
In February 1992, Arora & Safra showed NP = PCP[log(n),log(n)].
•
In April 1992, Arora, Lund, Safra, Sudan, & Szegedy showed
NP = PCP[log(n),1].
•
This led to implies a hardness of approximation result for the TSP,
assuming only P ≠ NP.
Another Necessary Digression:
PTAS’s and MaxSNP
• A polynomial time approximation scheme (PTAS) for an
optimization problem P is a collection of algorithms {Aε:ε >
0} such that each Aε runs in time bounded by a polynomial
in the input size (although possibly exponential in ε) and is
guaranteed to find a solution within a ratio of 1+ε of
optimum.
• Many problems have a PTAS, including, as we shall see
later, the 2-D (rounded) Euclidean TSP and the planar
graph TSP.
Another Necessary Digression:
PTAS’s and MaxSNP
•
MaxSNP is a class of optimization problems, introduced in
Papadimitriou & Yannakakis [1988,1991], each of which has a
polynomial-time approximation algorithm with with a finite worstcase ratio, but none of which was known to have a PTAS, although if
any one did have a PTAS, then they all did. It includes
– MaxCut.
– Max kSAT for any fixed k.
•
A problem is MaxSNP-hard if every member of MaxSNP has a
polynomial-time “gap-preserving” reduction to it.
•
If we can show that, assuming P ≠ NP, some specific member of
MaxSNP problem does not have a PTAS, then no MaxSNP-hard
problem has a PTAS under the same assumption.
•
A key example of a MaxSNP-hard problem:
– TSP with each edge weight in {1,2} [Papadimitriou & Yannakakis, 1993].
MAX kSAT
• In MAX kSAT, we are given an instance of
SATISFIABILITY in which each clause contains exactly k
literals, and are asked for a truth assignment that satisfies
the maximum number of clauses.
• Johnson [1973] presents a simple algorithm that is
guaranteed to satisfy a fraction 1 – (1/2)k of the clauses
and hence at least ((1 – (1/2)k)OPT.
• Theorem [Arora, Lund, Safra, Sudan, & Szegedy, 1992]:
There exists a k > 2 and ε > 0 such that, assuming P ≠ NP, no
polynomial time approximation algorithm for MAX kSAT can
guarantee to satisfy more than (1-ε)OPT clauses, and hence
MAX kSAT does not have a PTAS.
Proof
• Suppose we have a PCP[log(n),1] proof system for 3SAT (as is
guaranteed to exist by the PCP Theorem).
• We may assume without loss of generality that the verifier
always queries precisely k proof bits, for some constant k, and
never uses more than clog(n) random bits, where n is the length
of the input, for some other constant c.
• Note that given these constants, the verifier can never examine
more than knc different proof bits on an instance of size n, so
we may assume that knc is an upper bound on proof length.
• Let I be an instance of 3SAT of length n. We shall construct a
corresponding instance Ik of MAX-kSAT.
• There are knc variables in Ik, with variable xi standing for the
statement ‘‘the bit in location i of the proof is 1.’’
Proof, Slide II
•
Let r be the precise number of random bits that the verifier uses for
instance I.
•
For each of the 2r possible sequences x of r random bits, let
vx[1], …, vx[k] be the k variables corresponding to the addresses the
verifier examines given I and x.
•
Let Nx be the set of k-tuples of values for these variables
(assignments of bits to the addresses) that would cause the verifier
to disbelieve the proof. Note that we must have |Nx| ≤ 2k.
•
Now suppose (b1,...,bk) is a tuple in Nx. The statement that the
variables vx[i] do not take on this tuple of values is simply a single
kSAT clause.
•
For instance, if k = 4 and (b1 ,...,b4 ) = (1,0,0,1), then the clause would
be (¬vx[1] or vx[2] or vx[3] or ¬vx[4] ). Given x, the verifier will believe the
proof if and only if the conjunction of such kSAT clauses, one for
each tuple in Nx is true.
Proof, Slide III
•
Our kSAT instance is the conjunction, over all length r binary
sequences x, of all the clauses corresponding to tuples in Nx (for
a total of N = Σ|Nx| ≤ 2r+k clauses).
•
Note that the size of Ik (number of literals it contains) is at
most kN ≤ k2r+k ≤ k2knc. Thus it is bounded by a polynomial in the
size of I (and of course, so is the time to construct Ik).
•
Now, if I is satisfiable, there must be a proof (i.e., a truth
assignment for the variables vi) such that all the clauses
corresponding to each set Nx are satisfied.
•
If I is not satisfiable, then, for any truth assignment, at least
½2r of the sets Nx must yield one or more unsatisfied clauses.
•
The ratio between the maximum number of satisfiable clauses in
the two cases is thus at least (N−½2r)/N < 1 - ½2r/N ≥ 1 1/2k+1.
•
QED
Constants
• Original version of Arora et al. paper required k > 100 and so
only concluded something like “no guarantee greater than 1-ε for
an almost infinitesimal ε.
• Subsequently, Håstad, “Some optimal inapproximability results,”
J.ACM 48 (2001), 798-859, showed that one could take k=3 and
that for no ε > 0 could a polynomial-time algorithm for Max
3SAT guarantee to satisfy more than (7/8+ε)OPT clauses
unless P = NP, a tight match with the 7/8 guarantee for that
problem provided by the Johnson [1973] algorithm.
• Corollary: Assuming P ≠ NP, there is no PTAS for the
undirected TSP with triangle inequality.
• Proof: This is because the TSP with all edge lengths in
{1,2} obeys the triangle inequality and is MaxSNP-hard.
• The unobtainable ratio was initially something like
1.000001.
• This has subsequently been improved by [Papadimitriou &
Vempala, 2006] to
– 117/116 for the asymmetric TSP with triangle
inequality, and
– 220/219 for the symmetric TSP with triangle
inequality.
Possible Papers for Class Presentations
• Papadimitriou & Vempala, “On the approximability of the traveling
salesman problem,” Combinatorica 26 (2006), 101-120.
• Papadimitriou & Yannakakis (1991,1993): The class MaxSNP and the
complexity of the TSP with edge lengths in {1,2}.
• Papadimitriou & Yannakakis (1984): “The complexity of facets and some
facets of complexity.”
• Yannakakis (1991) on why attempts to prove that Hamilton Circuit is in P
via linear programming are doomed to fail, and the recent generalization
of this result.
• PTAS’s for Planar and Euclidean TSP’s.
• Papers on polynomial-time solvable special cases of the TSP.
• Papers on algorithms for the TSP on graphs with unit-length edges under
the shortest path metric.