modal_analysis_5 - Saeed Ziaei-Rad
advertisement

MDOF SYSTEMS WITH
DAMPING
General case
Saeed Ziaei Rad
MDOF Systems with hysteretic
damping- general case
Free vibration solution:
[M ]{x} ([K ] i[ D]){x} {0}
Assume a solution in the form of:
it
{x} {X }e
Here can be a complex number. The solution here is like
the undamped case. However, both eigenvalues and
Eigenvector matrices are complex.
The eigensolution has the orthogonal properties as:
[]T [M ][] [mr ];
[]T [ K iD][] [kr ]
The modal mass and stiffness parameters are complex.
MDOF Systems with hysteretic
damping- general case
Again, the following relation is valid:
kr
2
r (1 ir )
mr
2
r
A set of mass-normalized eigenvectors can be defined as:
{}r (mr )
1/ 2
{ }r
What is the interpretation of complex mode shapes?
The phase angle in undamped is either 0 or 180.
Here the phase angle may take any value.
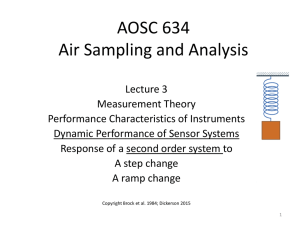
Numerical Example with
structural damping
x2
k4
k1
m2
m1
k2
k5
k3
m3
x1
k6
m1=0.5 Kg
m2=1.0 Kg
m3=1.5 Kg
k1=k2=k3=k4=k5=k6=1000 N/m
x3
Undamped
.5 0 0
[M ] 0 1 0
0 0 1.5
3 1 1
[K ] 1 3 1
1 1 3
Using command [V,D]=eig(k,M) in MATLAB
0
0
950
.464 .218 1.318
[ r2 ] 0 3352 0 [ ] .536 .782 .318
0
0
6698
.635 .493
.142
Proportional Structural Damping
Assume proportional structural damping as:
d j 0.05k j ,
j 1,,6
0
0
950(1 .05i )
[2r ]
0
3352(1 .05i )
0
0
0
6698(1 .05i )
.464(0 ) .218(180 ) 1.318(180 )
[] .536(0 ) .782(180 )
.318(0 )
.635(0 ) .493(0 )
.
142
(
0
)
Non-Proportional Structural
Damping
Assume non-proportional structural damping as:
d1 0.3k1
d j 0,
j 2,,6
0
0
957(1 .067i )
[2r ]
0
3354(1 .042i )
0
0
0
6690(1 .078i )
.463(5.5 ) .217(173 ) 1.321(181 )
[] .537(0 )
.784(181 ) .316(6.7 )
.636(0 )
.
492
(
1
.
3
)
.
142
(
3
.
1
)
Non-Proportional Structural
Damping
Each mode has a different damping factor.
All eigenvectors arguments for undamped and
proportional damp cases are either 0 or 180.
All eigenvectors arguments for non-proportional case
are within 10 degree of 0 or 180 (the modes are
almost real).
Exercise: Repeat the problem with
m1=1Kg, m2=0.95 Kg, m3=1.05 Kg
k1=k2=k3=k4=k5=k6=1000 N/m
FRF Characteristics
(Hysteretic Damping)
Again, one can write:
([K ] i[ D] 2[M ]){X }eit {F}eit
The receptance matrix can be found as:
H ( ) ([K ] i[ D] [M ]) [][ ][]
1
2
2
r
2
FRF elements can be extracted:
jrkr
H jk ( ) 2
2
2
r 1 r ir r
N
or
N
H jk ( )
r 1
r
Ajk
ir
2
r
2
2
r
Modal Constant
T
MDOF Systems with viscous
damping- general case
The general equation of motion for this case can be
written as:
[M ]{x} [C ]{x} [ K ]{x} { f }
Consider the zero excitation to determine the natural
frequencies and mode shapes of the system:
{x} {X }e st
This leads to:
([M ]s 2 [C]s [ K ]){X } {0}
This is a complex eigenproblem. In this case, there are
2N eigenvalues but they are in complex conjugate pairs.
MDOF Systems with viscous
damping- general case
sr , sr*
*
{ }r , { }r
r 1, , N
It is customary to express each eigenvalues as:
sr r ( r i 1 )
2
r
Next, consider the following equation:
(s [M ] sr [C] [ K ]){ }r {0}
2
r
Then, pre-multiply by {}qH
:
{} (s [M ] sr [C] [K ]){}r {0}
H
q
2
r
*
MDOF Systems with viscous
damping- general case
A similar expression can be written for { }q :
(s [M ] sq [C] [K ]){ }q {0}
2
q
This can be transposed-conjugated and then multiply by{ }r
{} (s [M ] sq [C] [K ]){}r {0}
H
q
2
q
**
Subtract equation * from **, to get:
(s s ){} [M ]{}r (sr sq ){} [C]{}r {0}
2
r
2
q
H
q
H
q
This leads to the first orthogonality equations:
(sr sq ){} [M ]{}r {} [C]{}r {0}
H
q
H
q
(1)
MDOF Systems with viscous
damping- general case
Next, multiply equation (*) by sq and (**) by s r :
sr sq{} [M ]{}r {} [K ]{}r {0}
H
q
H
q
(2)
Equations (1) and (2) are the orthogonality conditions:
If we use the fact that the modes are pair, then
sq r ( r i 1 r2 )
{ }q { }
*
r
MDOF Systems with viscous
damping- general case
Inserting these two into equations (1) and (2):
{ }rH [C ]{ }r
cr
2 r r
H
{ }r [ M ]{ }r mr
{ } [ K ]{ }r
kr
{ } [ M ]{ }r mr
2
r
H
r
H
r
Where mr , kr , c r are modal mass, stiffness and damping.
FRF Characteristics
(Viscous Damping)
The response solution is:
{X } ([K ] i[C] 2[M ])1{F}
We are seeking to a similar series expansion similar to the
undamped case.
To do this, we define a new vector {u}:
x
{u}
x 2 N 1
We write the equation of motion as:
[C : M ]N2 N {u}2 N1 [ K : 0]{u} {0}N1
FRF Characteristics
(Viscous Damping)
This is N equations and 2N unknowns. We add an identity
Equation as:
[M : 0]{u} [0 : M ]{u} {0}
Now, we combine these two equations to get:
C
M
M
K
{u}
0
0
0
{u} {0}
M
Which cab be simplified to:
[ A]{u} [ B]{u} {0}
3
FRF Characteristics
(Viscous Damping)
Equation (3) is in a standard eigenvalue form. Assuming a
trial solution in the form of {u} {U}est
(sr [ A] [ B]){ }r {0}
r 1,,2 N
The orthogonality properties cab be stated as:
[ ] [ A][ ] [ar ]
T
[ ] [ B][ ] [br ]
T
With the usual characteristics:
br
sr
ar
r 1,,2 N
FRF Characteristics
(Viscous Damping)
Let’s express the forcing vector as:
F
{P}2 N 1
0
Now using the previous series expansion:
2N
X
{ }Tr {P}{ }r
iX 2 N 1 r 1 ar (i sr )
And because the eigenvalues and vectors occur in complex
conjugate pair:
N
X
{ }Tr {P}{ }r { }rH {P}{ *}r
*
*
i
X
a
(
i
s
)
a
(
i
s
)
2 N 1 r 1 r
r
r
r
FRF Characteristics
(Viscous Damping)
Now the receptance frequency response function H jk
Resulting from a single force Fk and response parameter X j
jr kr
N
H jk ( )
or
r 1
ar ( r r i( r 1 r2 )
N
H jk ( )
Where:
r 1
r
* *
jr
a*r ( r r i( r 1 r2 )
R jk i( / r )(r S jk )
2 2 2ir r
r
{r Rk } 2( r Re{r Gk } Im{r Gk } 1 )
2
r
{r S k } 2 Re{r Gk }
{r Gk } ( kr / ar ){ }r
kr