Sections 1.8 and 1.9
advertisement

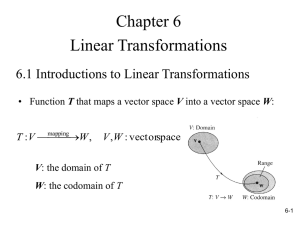
Sections 1.8/1.9: Linear Transformations Recall that the difference between the matrix equation Ax b and the associated vector equation x1a1 x 2a 2 L x p a p b is just a matter of notation. However the matrix equation Ax b can arise is linear algebra (and applications) in a way that is not directly connected with linear combinations of vectors. This happens when we think of a matrix A as an object that acts on a vector x by multiplication to produce a new vector Ax Example: x = A 2 3 0 0 0 2 1 1 2 4 b 2 -2 3 0 0 1 1 1 0 0 2 0 2 1 1 2 0 0 R4 R2 Recall that Ax is only defined if the number of columns of A equals the number of elements in the vector x. 2 4 R2 2 3 0 0 2 0 2 1 1 1 Undefined 3 R 2 4 2 2 3 0 0 Undefined 0 2 1 1 1 0 2 4 R4 R2 1 2 3 0 0 2 1 0 2 1 1 2 0 0 A b x R R2 4 So multiplication by A transforms x into b . In the previous example, solving the equation Ax = b can be thought of as finding all vectors x in R4 that are transformed into the vector b in R2 under the “action” of multiplication by A. Transformation: Any function or mapping T : R R n m T Range Domain R Codomain n R m Matrix Transformation: Let A be an mxn matrix. Ax b Domain R n x a11 a12 ... a21 a22 ... ... ...... am1 am2 ... A b Codomain Rm x b A a1n x1 a11 x1 a12 x 2 ... a1n x n a2n x 2 a21 x1 a22 x 2 ... a2n x n ... ... ... amn x n am1 x1 am 2 x 2 ... amn x n Example: The transformation T is defined by T(x)=Ax where T : R R n m For each of the following determine m and n. 1 3 1. A 3 5 1 7 1 0 0 2. A 0 1 0 1 3 3. A 0 1 Matrix Transformation: Ax=b A x b m n Domain R n Codomain R m Linear Transformation: Definition: A transformation T is linear if (i) T(u+v)=T(u)+T(v) for all u, v in the domain of T: (ii) T(cu)=cT(u) for all u and all scalars c. Theorem: If T is a linear transformation, then T(0)=0 and T(cu+dv)=cT(u)+dT(v) for all u, v and all scalars c, d. Example. Suppose T is a linear transformation from R2 to R2 1 2 0 0 such that T and T . With no additional 0 1 1 1 information, find a formula for the image of an arbitrary x in R2. x1 1 0 x x1 x2 x 2 0 1 1 0 T x T x1 x2 1 0 1 0 x1T x2T 0 1 2 0 x1 x2 1 1 x1 2 0 x1 T x2 1 1 x2 1 2 T 0 1 0 0 T 1 1 x1 2 0 x1 T x2 1 1 x2 4 2 0 2 1 1 1 1 Theorem 10. Let T : R n R m be a linear transformation. Then there exists a unique matrix A such that T x Ax for all x in Rn. In fact, A is the m n matrix whose jth column is the vector T (e j ) where e j is the jth column of the identity matrix in Rn. 1 2 T 0 1 0 0 T 1 1 3 1 T 1 0 5 2 0 T 1 1 5 x1 2 0 x1 T x2 1 1 x2 x1 T x2 3 1 5 2 x1 1 x2 5 A is the standard matrix for the linear transformation T Find the standard matrix of each of the following transformations. Reflection through the x-axis 1 0 Reflection through the y-axis 1 0 0 1 Reflection through the y=x 0 1 0 1 1 0 Reflection through the y=-x 0 1 1 0 Reflection through the origin 0 1 0 1 Find the standard matrix of each of the following transformations. Horizontal Contraction & Expansion k k Vertical Contraction & Expansion k 0 0 1 1 0 0 k Projection onto the x-axis 1 0 0 0 Projection onto the y-axis 0 0 0 1 Applets for transformations in R2 From Marc Renault’s collection… Transformation of Points http://webspace.ship.edu/msrenault/ggb/linear_transformations_points.html Visualizing Linear Transformations http://webspace.ship.edu/msrenault/ggb/visualizing_linear_transformations.html Definition m A mapping T : R n R m is said to be onto R n if each b in R m is the image of at least one x in R . Definition A mapping T : R n R m is said to be one-to-one n m R R if each b in is the image of at most one x in . Theorem 11 Let T : R n R m be a linear transformation. Then, T is one-to-one iff T ( x) 0 has only the trivial solution. . Theorem 12 Let T : R n R m be a linear transformation with standard matrix A. m 1. T is onto iff the columns of A span R . 2. T is one-to-one iff the columns of A are linearly independent