chapter7-note
advertisement

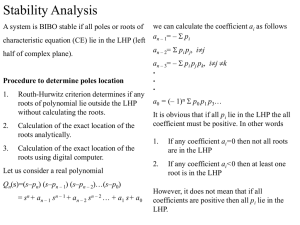
Chapter 7 Stability and Steady-State Error Analysis § 7.1 Stability of Linear Feedback Systems § 7.2 Routh-Hurwitz Stability Test § 7.3 System Types and Steady-State Error § 7.4 Time-Domain Performance Indices § 7.1 Stability of Linear Feedback Systems (1) • Basic Concepts: (1) Equilibrium States, x Constant (Usually x 0) Nonlinear T - I System: x F(x) 0 F(x) 0, Multiple equilibriu m states Linear T - I System: x Ax 0 Ax 0, Single equilibriu m state EX : x ax bx 0, State space form: x x1 , x 1 x2 x 1 x 0 x 0, x 0 , 2 Since x 0 , x 0 x 0 in equilibriu m (2) Stable System 1 x1 x 1 0 x b a x 2 2 System response can restore to initial equilibrium state under small disturbance. (3) Meaning of Stable System Energy sense – Stable system with minimum potential energy. Signal sense – Output amplitude decays or grows with different meaning. Lyapunov sense – Extension of signal and energy sense for state evolution in state space. § 7.1 Stability of Linear Feedback Systems (2) • Plant Dynamics: Regular pendulum (Linear) Inverted pendulum (Linear) m m Equilibriu m State l 0 0 g m m b , b>0 Minimum potential energy b g 0 ml 2 l Positive spring ef fect Pole - Zero diagram b g ( 2 2.0 , 3.0) ml l Natural response 0 l b b>0 g Maximum potential energy b g 0 ml 2 l Negative spring effect j Pole - Zero diagram b g ( 2 2.0 , 3.0) ml l 1/3 2 -1 2 Natural response 1.0 j 1/3 -3 1 0 1.0 t t § 7.1 Stability of Linear Feedback Systems (3) • Closed-loop System: d(t) r(t) + eb y(t) G(s) b H(s) Natural behavior of a control system, r(t)=d(t)=0 -1 ea G(s) y(t) H(s) Equilibrium state ,ea 0 , y 0 ,y 0 , Initial relaxation system, I.C.=0 Characteristic equation and closed - loop poles G(s) N(s) 1 G(s)H(s) D(s) Poles : D(s) 0 T(s) No general algebraic solution for 5th-order and above polynomial equation (Abel , Hamilton) § 7.1 Stability of Linear Feedback Systems (4) • Stability Problems: Stabilization of unstable system m l m g Destabilization Effect on stable system Controller and Driver , F T l Controller and Driver , G(s) : Unstable plant Closed-loop : Stable g m m G(s) : stable plant Closed-loop : Unstable § 7.1 Stability of Linear Feedback Systems (5) • Stability Definition (1) Asymptotic stability Stable system if the transient response decays to zero y(n) ( t ) an1y(n1) ( t ) a0 y( t ) 0 I.C. y(0), y(1) (0) , , y(n1) (0) lim y( t ) 0 t (2) BIBO stability Stable system if the response is bounded for bounded input signal t y(t ) g(t ) u() d 0 u(t ) M y(t ) N The impulse response of a system is absolutely integrable. g( t ) t § 7.1 Stability of Linear Feedback Systems (6) (3) S-domain stability System Transfer Function : T(s) Stable system if the poles of T(s) all lies in the left-half s-plane. j stable poles Unstable poles Marginally stable/unstable The definitions of (1), (2), and (3) are equivalent for LTI system. § 7.2 Routh-Hurwitz Stability Test (1865-1905) (1) • Characteristic Polynomial of Closed-loop System D(s) ansn an1sn1 a1s a0, an 0 Hurwitz polynomial All roots of D(s) have negative real parts. stable system Hurwitz’s necessary conditions: All coefficients (ai) are to be positive. Define D0 (s) ansn an2sn2 D1(s) an1sn1 an3sn3 D0 (s) 1 1s 1 D1(s) 2s 3s , 1 an a b , 2 n1 , 3 1 , an1 b1 c1 Note: Any zero root has been removed in D(s). § 7.2 Routh-Hurwitz Stability Test (1865-1905) (2) • Routh Tabulation (array) an 2 an 4 s n an sn1 an1 an3 an5 1 an an 2 n2 b1 , b2 b3 s b2 b1 a a a n3 n1 n1 c3 c2 sn 3 c 1 s1 g1 h1 0 s0 1 an an 4 a a a n5 n1 n1 an 5 an 3 1 a 1 a c 1 n1 , c 2 n1 b b b b b b 3 2 1 1 1 1 0 • Routh-Hurwitz Stability Criterion (1) The polynomial D(s) is a stable polynomial if i are all positive, i.e. an, an1, b1, c1, h1 are all positive. (2) The number of sign changes in an, an1, b1, c1, h1 is equal to the number of roots in the RH s-plane. (3) If the first element in a row is zero, it is replaced by a small ε, ε >0, and the sign changes when 0 are counted after completing the array. (4) If all elements in a row are zero, the system has poles in the RH plane or on the imaginary axis. § 7.2 Routh-Hurwitz Stability Test (1865-1905) (3) For entire row is zero Identify the auxiliary polynomial The row immediately above the zero row. The original polynomial is with factor of auxiliary polynomial. The roots of auxiliary polynomial are symmetric w.r.t. the origin: j 4 3 2 possible cases (1~4) of poles distribution 1 § 7.2 Routh-Hurwitz Stability Test (1865-1905) (4) Ex: For a closed-loop system with transfer function T(s) T(s) T(s) N(s) , order of D(s) order of N(s) D(s) D(s) a3s3 a2s2 a1s1 a0 , ai 0 Routh Array s3 s2 s1 s0 a3 a2 a 2a1 a0a3 a2 a1 a0 0 a0 Stability condition : a0 0, a2a1 a0a3 0 a2a1 a0a3 a2 Ex: Find stability condition for a closed-loop system with characteristic polynomial as s5 bs4 cs3 ds2 es 1 0 Sol: b, c, d, e 0, bcd b d2 b2e § 7.2 Routh-Hurwitz Stability Test (1865-1905) (5) Ex: For a colsed-loop system with characteristic polynomial D(s) s5 2s4 3s3 6s2 5s 3 Determine if the system is stable Sign of firstcolumn for 0, 0 Sol: Routh Table s5 s4 7 2 s3 3 s2 s1 s0 s5 s4 1 2 3 6 s3 0ε s2 6ε - 7 ε 42ε - 49 - 6ε 2 12ε -14 3 s1 s 0 5 3 tw osign changes tw opoles in RHP unstable system Ex: For D(s) s3 2s2 4s 8, determine if the system is stable 1 Sol: Routh Table D(s) (2s2 8)( s 1) s3 1 4 s2 2 8 s1 s 0 0 2 (s2 4)(s 2) 2 Auxiliary eq. : D(s) 2s 8 (s 2j)(s 2j)(s 2) poles : s -2j, 2j, - 2 stable system j 2 2 2 § 7.2 Routh-Hurwitz Stability Test (1865-1905) (6) • Absolute and Relative Stability Absolute Stability Relative Stability j p-coordinate j s-coordinate s=0 stability margin Characteristic equation D(s) 0 R-H Test on D(s) Characteristic equation set s p - , 0 D(s) D(p ) D’ (p) 0 R-H Test on D ’(p) § 7.3 System Types and Steady-State Error (1) • Steady-state error for unity feedback systems R(s) + E(s) G(s) Y(s) Open - loop T.F. G(s) Closed - loop T.F. T(s) Error response R(s) T(s) Y(s) + E(s) E(s) [1 T(s)]R(s) Steady state error : lim e( t ) e s.s. t Use of final - value theorem : (1) T(s) is stable 1 R(s) (2) e( ) lim s[1 T(s)]R(s) lim s s 0 s 0 1 G(s) For nonunity feedback systems + G(s) H(s) + G'(s) G' G 1 G(H-1) § 7.3 System Types and Steady-State Error (2) • Fundamental Regulation and Tracking Error Regulation s.s. error 1 R(s) , Step input s 1 e( ) 1 lim G(s) 1 t r(t) s0 1 1 G( s) e(t) 1 1 G(s) e(t) Tracking s.s. error 1 , Ramp input s2 1 e() lim sG(s) R(s) s0 1 t r(t) § 7.3 System Types and Steady-State Error (3) • Open-loop System Types K(sm bm1sm1 ...... b1s b0 ) Tds G(s) N q e , N q m for Td 0 q1 S (s aq1s ...... a1s a0 ) a0 , b0 0, 1 G(s) 0 N: System Types No. of pure integrators in open-loop transfer function N 0, Type 0 system N 1, Type 1 system N 2, Type 2 system . . . . . . DC Gain: limG(s) s 0 Type 0 system DC Gain Kb0 (static gain) a0 § 7.3 System Types and Steady-State Error (4) • Position Control of Mechanical Systems (1) Command signal r(t) 3 4 2 1 t Region 1 and 3: Constant acceleration and deceleration Region 2: Constant speed Region 4: Constant position (2) Error constants K p lim G(s) : position error constant s0 K v lim sG(s) : velocity error constant s 0 K a lim s2G(s) : acceleration error constant s 0 § 7.3 System Types and Steady-State Error (5) (3) Systems control with non-zero steady-state position error Constant position for Type 0 system es.s. r0 1 Kp position Step signal r0 es.s. r , t 0 r0 0, t 0 t Constant velocity for Type 1 system es.s. v 0 Kv position r v 0t v0 v t, t 0 r 0 0, t 0 Kv No velocity error in steady state t Constant acceleration for Type 2 system es.s. a0 Ka Ramp signal position r a0 Ka t a0 2 t 2 Parabolic signal a0 2 t ,t 0 r2 0, t 0 § 7.3 System Types and Steady-State Error (6) • Steady-state position errors for different types of system and input signal Position command Type of Constant Constant Constant position (r0 ) velocity (v 0 ) acceleration (a0 ) r r0 r v0t r0 1 Kp 0 v0 Kv 0 0 a0 Ka Open-loop System Type 0 Type 1 Type 2 r 1 2 a0 t 2 Output positioning in feedback control is driven by the dynamic positional error. System nonlinearities such as friction, dead zone, quantization will introduce steady-state error in closed-loop position control. § 7.3 System Types and Steady-State Error (7) Ex: Find the value of K such that there is 10% error in the steady state + G(s) r(t) 1 G(s) K(s 1) s(s 2)(s 3) t Sol: System G(s) is Type 1 s.s. error in ramp input e() 1 0.1 K v 10 Kv For velocity error constant K v lim sG(s) K 6 s0 K 60 § 7.4 Time-Domain Performance Indices (1) • Performance of Control System d(t) Stability Transient Response Steady-state Error r(t) + - e( t ) G1(s) u( t ) G2(s) y(t) Internal States x • Performance Indices (PI) Controller A scalar function for quantitative measure of the performance specifications of a control system. T P. I. f(e(t), r(t), x(t), y(t))dt 0 error command state output Use P.I. To trade off transient response and steady-state error with sufficient stability margin. § 7.4 Time-Domain Performance Indices (2) • Systems Control (1) Classical control Plant: Input-Output Model T T P. I. : IAE e(t)dt ISE e2 (t)dt 0 0 T ITAE t e(t)dt 0 T ITSE te2(t)dt 0 Controller: PID Control KP + e( t ) KI / s + K Ds P-Proportional control: I-Integral control: e(t) D-Differential control: (2) Modern control Plant: State-space Model P. I.: Usually Quadratic functional Controller: States feedback control u(t) e(t) Kx(t) e( t ) KI / s e( t ) KP u( t ) u( t ) K Ds u( t ) § 7.4 Time-Domain Performance Indices (3) • Optimal Control Given: Plant model Control configuration (Usually feedback) Controller structure (Usually linear) Design constraints Objective: Minimize P. I. (P. I. to be selected) Find: Optimal parameters in controller Ex: Design optimal proportional control system + K - G(s) proportional controller Find optimal K to minimize P. I. P. I. K* Optimal K K