PowerPoint ******

Fast and Accurate Image Matching with Cascade Hashing for 3D
Reconstruction
J Cheng CVPR14
Hyunchul Yang( 양현철 )
1. Background
2. Related work
3. Approach
4. Experiments
5. Result
6. Conclusion
Background
3D Reconstruction technology is similar with image retrieval
Background
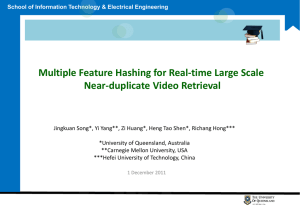
Feature Matching is very computational cost in 3D reconstruction
Feature
Extraction
Around 50%
Running time
Feature
Matching
(Hashing)
Track
Generation
Geometric
Estimation
3D Reconstruction
Related work
KD-Tree
Well known nearest neighbor search algorithm.
But it not suitable for high dimensional space
Related work
LDAHash(Linear Discriminant Analysis) PAMI 2012
Related work
LDAHash(Linear Discriminant Analysis) PAMI 2012
Related work
LDAHash(Linear Discriminant Analysis) PAMI 2012
Related work
LDAHash(Linear Discriminant Analysis) PAMI 2012
Px + t = 0
P is projection matrix that is designed either to solely minimize the in-class covariance of the descriptor or to jointly minimize the in-class covariance and maximize the covariance across classes t is threshold matrix so that the resulting binary strings maximize recognition rates.
3. Approach
Approach
• Cascade Hashing ( 3 Step )
1. Hashing Lookup with Multiple tables
2. Hashing Remapping
3. Top k Ranking via Hashing
Coarse search
Approach
• Cascade Hashing ( 3 Step )
1. Hashing Lookup with Multiple tables
2. Hashing Remapping
3. Top k Ranking via Hashing
Refined search
Approach
• Cascade Hashing ( 3 Step )
1. Hashing Lookup with Multiple tables
2. Hashing Remapping
3. Top k Ranking via Hashing
Brute search
Approach
1. Hashing Lookup with Multiple tables
1 st hash table
L = Try Count, Number of tables m = Number of hyper-planes
Approach
1. Hashing Lookup with Multiple tables
2 nd hash table
L = Try Count, Number of tables m = Number of hyper-planes
Approach
1. Hashing Lookup with Multiple tables
L th hash table
L = Try Count, Number of tables m = Number of hyper-planes
Approach
1. Hashing Lookup with Multiple tables
L = Number of tables m = Number of hyper-planes
Ex) m = 8
L = 6
Coarse search
Approach
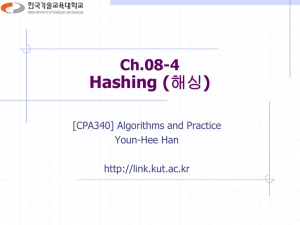
2. Hashing Remapping
Approach
2. Hashing Remapping n = Number of hyper-planes
Approach
2. Hashing Remapping n = Number of hyper-planes
3
2
1
0
2
3
2
2
4
3
Approach
2. Hashing Remapping n = Number of hyper-planes
Ex) n = 128
Refined search
Approach
3. Top k Ranking via Hashing
Approach
3. Top k Ranking via Hashing
Brute-force search on top k bucket
4. Result
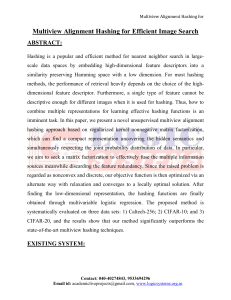
Result
Standard Oxford dataset with SIFT key points
Result
Standard Oxford dataset with SIFT key points x 10
Result
Standard Oxford dataset with SIFT key points x 15
Result
Standard Oxford dataset with SIFT key points x 100
Conclusion
Paper proposed a Cascade Hashing method to speed up the image matching
Accelerated by our approach in hundreds times than brute force matching
Even achieves ten times or more than Kd -tree based matching
While retaining comparable accuracy
.
How about apply this idea to spherical hashing?