Technology Development of proportional solenoid valve for space
advertisement

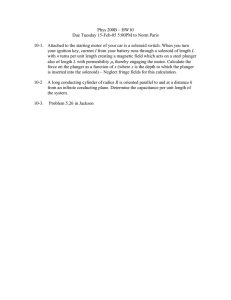
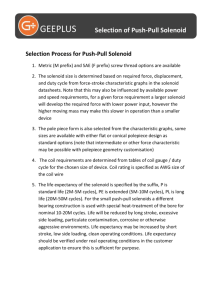
INDIAN INSTITUTE OF TECHNOLOGY MADRAS Department of Engineering Design Robotics Laboratory TECHNOLOGY DEVELOPMENT OF PROPORTIONAL SOLENOID VALVE FOR SPACE APPLICATIONS Objective Indigenous development of proportional solenoid valve for space applications is the major objective of the project. Necessary know how for the same will be developed and transferred to ISRO. Prototyping of a normally closed type proportional valve will be carried out by ISRO with the technical assistance from IIT MADRAS. Design Approach A proportional valve can take intermediate positions depending upon the strength of the electric signal. Proportional valves has to be designed by modifying its parts like plunger, spring etc. For the valve to control at intermediate positions the force/stroke curve should be constant throughout the displacement. One method to make the force/stroke constant throughout the stroke length is making the air gap between the plunger and magnet constant. By tapering the plunger the air gap between the plunger and magnet can be made constant. So far the design of the solenoid valve a plunger with taper angle is made. For smaller angles, the force will decrease gradually from the beginning to end of the stroke because the plunger will saturate early in the stroke. For larger angles, the force will increase gradually from beginning to end of the stroke for larger angles because the plunger will not saturate early in its stroke. So to obtain constant force through out the stroke a medium angle is used. Design Requirements and Specification Following are the brief specification for the design of proportional solenoid valve Max stroke=0.7mm Solenoid force=50N Operating range of current (for 5kg load)=500milliampere(max) Plunger diameter=20 to 22 mm Solenoid wire gauge,(preferred sizes)=AWG26,28,30,32,34&37 Solenoid materials AISI 446(magnetic) and AISI304L (non magnetic) 3D Model of the Solenoid Simulation of Solenoid Dynamics Mathematical Modeling and Analysis Time Response Force vs Air gap Force vs Displacement Flux and Force Analysis Experimental Verification SOLENOID VALVE DISPLACEMENT SENSOR FORCE SENSOR DATA ACQUSITION SYSTEM Researchers : Dr. T. Asokan, Rakesh Sourirajan, Manoj M COMPUTER